Алгоритмы коррекции показаний системы видеоанализа движений человека по измерениям силовой платформы
Предложен способ восстановления утерянных измерений системы видеоанализа, основанный на использовании дополнительной информации о движении человека. Восстановление проводится в два этапа: на первом этапе на временных интервалах, содержащих полный и корректный набор измерений, проводится идентификация комбинаций параметров модели, на втором этапе по дополнительным измерениям и оценкам комбинаций… Читать ещё >
Содержание
- Глава 1. Измерительные системы в биомеханике. Устройство, модель измерений и погрешности
- 1. 1. Система видеоанализа
- 1. 1. 1. История развития, устройство и применение систем видеоанализа
- 1. 1. 2. Характерные сбои и погрешности системы
- 1. 2. Силовая платформа
- 1. 2. 1. Устройство и применение платформ
- 1. 2. 2. Оценка погрешности силовой платформы
- 1. 3. Методы обработки показаний системы видеоанализа
- 1. 1. Система видеоанализа
- Глава 2. Математическая модель антропоморфного трехзвенника и идентификация её параметров
- 2. 1. Математическая модель движения
- 2. 1. 1. Описание эксперимента
- 2. 1. 2. Уравнение движения центра масс
- 2. 1. 3. Уравнение изменения кинетического момента
- 2. 1. 4. Модель измерений системы видеоанализа
- 2. 1. 5. Вычисление сил и момента в голеностопном суставе по показаниям силовой платформы
- 2. 2. Идентификация комбинаций параметров модели
- 2. 2. 1. Методы определения параметров геометрии масс
- 2. 2. 2. Идентификация комбинаций параметров модели для уравнения движения центра масс
- 2. 2. 3. Идентификация комбинаций параметров модели для уравнения изменения кинетического момента
- 2. 1. Математическая модель движения
- 3. 1. Восстановление показаний системы видеоанализа по измерениям нормальной реакции
- 3. 1. 1. Линеаризованные соотношения
- 3. 1. 2. Уравнения в конечных разностях
- 3. 1. 3. Модельная задача восстановления показаний системы видеоанализа по измерениям нормальной реакции
- 3. 1. 4. Восстановление показаний системы видеоанализа по экспериментальным значениям нормальной реакции
- 3. 2. Восстановление показаний системы видеоанализа по оценкам момента в голеностопном суставе
- 3. 2. 1. Линеаризованные соотношения
- 3. 2. 2. Уравнения в конечных разностях
- 3. 2. 3. Модельная задача восстановления показаний системы видеоанализа по оценкам момента в голеностопном суставе
- 3. 2. 4. Восстановление показаний системы видеоанализа по экспериментальным значениям момента в голеностопном суставе
Алгоритмы коррекции показаний системы видеоанализа движений человека по измерениям силовой платформы (реферат, курсовая, диплом, контрольная)
Введение
в проблематику и ее актуальность.
Из всего многообразия клинической биомеханики существенную и относительно однородную часть представляет раздел, занимающийся изучением движений. Этот раздел можно определить как клинический анализ движений. Клинический анализ движений человека (Human Motion Analysis) в последние годы получил признание как один из наиболее эффективных методов диагностики различных видов врожденной и приобретенной патологии опорно-двигательного аппарата. В настоящее время он активно применяется в клинической практике в области функциональной диагностики, где используется для предоперационного планирования, послеоперационных наблюдений за состоянием пациента, оценки предпосылок и ' результатов хирургического вмешательства, а также в целом ряде научных исследований в области ортопедии, связанных с апробацией новых методик и разработкой реабилитационного оборудования.
В настоящее время клинический анализ движения представляет собой целый комплекс различного рода методик, каждая из которых ориентирована на исследование и диагностику функционального состояния отдельных органов и целых систем человеческого организма. Как правило, различия методик обуславливаются характером проводимого исследования и инструментальными возможностями исследовательской лаборатории. На сегодняшний день одними из самых распространенных инструментов клинического анализа движения являются: гониометры, электромагнитные системы, датчики угловой скорости, электромиографы, различные системы видеоанализа, стабилометрические и динамометрические платформы, и т. д. Возможность каждого из этих приборов характеризуется составом измерений и инструментальными погрешностями. Характер и способы борьбы с такого рода погрешностями весьма различны. Стоит отметить, что при некоторых исследованиях значительную роль играет индивидуальность проведения эксперимента, а, следовательно, и индивидуальность погрешностей, в том числе инструментальных. Для некоторого класса исследований борьба с погрешностями допускает осреднение по реализациям набора экспериментальных измерений [8]. Но существует большое количество задач, которые в силу различных причин ограничивают исследователя количеством и качеством экспериментальных измерений. Например, больные детским церебральным параличом (ДЦП) зачастую не в состоянии в процессе исследования повторить несколько движений подряд, что может сильно ограничить статистику экспериментальных записей. На данный момент существуют различные подходы, призванные бороться с индивидуальными погрешностями того или иного биомеханического измерительного прибора [51], но все они имеют свои недостатки и не всегда удобны в применении на практике. Поэтому разработка более совершенных и универсальных методов повышения точности биомеханических исследований является востребованной и актуальной задачей.
Помимо целого класса методов клинического анализа движений, основанного на качественных оценках измерительных приборов, в современных исследованиях часто применяются математические модели, описывающие процессы, которые интересуют исследователя. Применение математического моделирования позволяет конструировать протезы, помогать проводить целый ряд операций на опорно-двигательном аппарате, давать оценки функционального состояния мягких тканей человека и диагностику их заболеваний, строить модели отдельных органов и частей тела человека. Так, в работах [54], [55] при помощи математического моделирования строятся динамические и кинематические модели нижних конечностей человека, учитывающие различные группы мышц. Вычисляются моменты и реакции в различных суставах тела человека. По измерениям электромиограммы и вектора реакции опоры исследуется вклад каждой группы мышц нижних конечностей в общее движение человека. Даже достаточно простые с точки зрения механики математические модели могут существенно улучшать понимание того или иного физиологического процесса. В [45], [62] с использованием трехзвенной модели тела человека изучаются процессы механизмов регуляции позы. В математической модели, предназначенной для исследования механизмов регуляции, можно выделить две составляющие: биомеханическую модель тела человека и модель управления, описывающую собственно механизмы регуляции позы. Последняя во многом зависит от первой. В работах [8], [9], [11], [15], [33], [34], [35], [46], [47], рассматриваются различные подходы в изучении движения человека, механизмов регуляции позы, нарушений опорно-двигательного аппарата средствами математического моделирования.
Современные методы анализа движения человека совмещают в себе как диагностические методики, использующие измерения различного характера, так и математическое моделирование, основанное на известных законах механики и динамики. Использование математических моделей при обработке измерений позволяет судить о параметрах, прямое измерение которых невозможно (например, мышечных усилиях [36]).
Большинство современных лабораторий, занимающихся клиническим анализом движения, имеют в своем распоряжении целый набор различного рода измерительных приборов, при помощи которых и проводятся исследования. По каждому из измерений исследователь может делать прогнозы и выводы независимо от других показаний. С точки зрения математического моделирования, при анализе движения набор измерений используемой аппаратуры часто бывает избыточен. Имея набор синхронных измерений движения человека и соответствующую математическую модель связи этих измерений, можно как оценить состоятельность самой модели, так и использовать ее при анализе движения. Это положение явилось основой для исследования, которому посвящена настоящая работа.
В работе на примере частного случая рассматривается новый подход в решении проблемы повышения точности биомеханических измерений. В качестве измерительного устройства рассматривается широко распространенная в современных исследовательских лабораториях система видеоанализа.
Подобное исследование является одним из первых этапов разработки подхода к решению проблемы повышения точности показаний биомеханических приборов, использующего дополнительные измерения и математическое моделирование. Несмотря, на частность рассматриваемой задачи, ее анализ можно использовать для отработки различных приемов и методик решения более общих задач.
Цель и задачи исследования
.
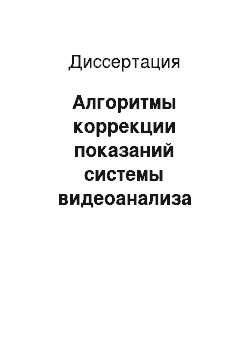
В данной работе рассмотрен способ комплексирования измерений датчиков движения человека при помощи математической модели движения. Рассматриваемый набор датчиков состоит из системы видеоанализа и силовой платформы, запись показаний которых проводится синхронно (рис.1). Часто измерения системы видеоанализа содержат некорректную информацию. Основной целью настоящей работы является построение алгоритма восстановления информации системы видеоанализа по измерениям силовой платформы ^ использованием математической модели движения. •
Для достижения поставленной цели решались следующие задачи:
1. Выбор математической модели движения человека.
2. Построение модели погрешностей измерений для системы видеоанализа и силовой платформы.
3. Идентификация параметров математических моделей.
4. Разработка алгоритма восстановления утерянной информации системы видеоанализа, основанного на использовании дополнительной информации о движении человека. В качестве дополнительной информации рассматриваются измерения силовой платформы и математическая модель движения.
5. Численный анализ эффективности предлагаемого алгоритма. 6
Возможность использования и эффективность подобного алгоритма рассмотрены на примере модельной задачи. Рассматривалось движение человека в сагиттальной плоскости типа приседания. Движение человека моделировалось трехзвенником. В качестве измерений системы видеоанализа рассматривались углы, вычисленные по координатам маркеров, в качестве дополнительных измерений рассматривались измерения силовой платформыреакция опоры и оценка момента в голеностопном суставе человека. Предполагается, что в процессе движения на некотором участке времени информация об одном из углов утеряна. Построенный алгоритм позволяет восстанавливать утраченную информацию.
Рис. 1. Схема комплекса, состоящего из системы видеоанализа и силовой платформы.
План диссертации.
Диссертация состоит из введения, трех глав и заключения. В первой главе кратко изложены основные методики клинического анализа движения и их инструменты, более подробно рассматривается измерительный комплекс, состоящий из системы видеоанализа и силовой платформы. Проводится анализ погрешностей комплекса, проводится оценка динамических характеристик силовой платформы. Рассматриваются работы, посвященные схожей проблематике.
Заключение
В диссертационной работе рассматривалась задача восстановления утраченных измерений системы видеоанализа по дополнительным измерениям силовой платформы и модели движения человека. В процессе решения этих задач были получены следующие результаты:
1. Предложен способ восстановления утерянных измерений системы видеоанализа, основанный на использовании дополнительной информации о движении человека. Восстановление проводится в два этапа: на первом этапе на временных интервалах, содержащих полный и корректный набор измерений, проводится идентификация комбинаций параметров модели, на втором этапе по дополнительным измерениям и оценкам комбинаций параметров проводится восстановление утраченных измерений системы видеоанализа. Подробно проанализирован случай, когда в качестве дополнительной информации рассматриваются измерения силовой платформы.
2. Составлена система уравнений, связывающая показания измерительных датчиков. Она объединяет математическую модель движения человека в сагиттальной плоскости и модель измерительной аппаратуры. В модели измерений системы видеоанализа учтены особенности моделирования суставов человека шарнирами, погрешности, связанные с работой системы видеоанализа и особенностью крепления маркеров на сегментах человеческого тела.
3. Построен алгоритм, позволяющий на этапе идентификации оценивать наблюдаемые комбинации параметров модели движения человека и погрешностей измерений. Главным отличием предложенного алгоритма от применяемых ранее методов является индивидуальность оценок параметров для каждого конкретного испытуемого и погрешностей каждого конкретного эксперимента. Представлен ряд модификаций алгоритма, использующих различные формы уравнений движения. Показано, что этап идентификации позволяет существенно снизить ошибку восстановления.
4. Предложена итерационная процедура этапа восстановления информации. Возможность использования предлагаемого подхода и эффективность разработанного алгоритма восстановления рассмотрены на примере движения человека в сагиттальной плоскости без отрыва стоп. Разработана методика прогноза результатов восстановления измерений системы видеоанализа, использующая число обусловленности задачи в качестве меры успеха ее решения. Эти выводы подтверждены сравнительным анализом результатов решения модельной задачи и результатов работы алгоритма на экспериментальных данных.
Список литературы
- Агзамов Д.С., Загородный Н. В., Макунин В. И. Тотальное эндопротезирование тазобедренного сустава при ревматических заболеваниях. Вестник травматологии и ортопедии им. H.H. Пирогова, 2005, № 3
- Александров В.В., Болтянский В. Г., Лемак С. С., Парусников H.A., Тихомиров В. М. Оптимизация динамики управляемых систем. М.: Изд-во МГУ, 2000.
- Андреев В.А. Разработка первой отечественной системы видеозахвата движения человека // Труды конференции «Новые информационные технологии». Судак, Крым, 22−29 мая 2005 г., С. 317−318.
- Бегун П.И., Шукейло Ю. А. // Биомеханика. СПб.: Политехника, 2000.
- Бернштейн H.A. Исследования по биодинамике локомоций. Ходьба взрослого нормального мужчины. М.: Издательство ВИЭМ, 1935.
- Виттенбург И. Динамика системы твердых тел. Изд-во «Мир» Москва 1980,292 с.
- Воронов A.B. История биомеханической видеосъемки // http://www.videomotion.ru/ официальный сайт фирмы разработчика-производителя системы видеоанализа StarTrace.
- Воронов A.B. // Анатомическое строение и биомеханические характеристики мышц и суставов нижней конечности М.: Физкультура, образование и наука, 2003. 202 — 203 с.
- Воронов A.B. Роль одно- и двусуставных мышц нижних конечностей при наземной локомоции. // Физиология человека. 23(3). 2004.
- Воронов A.B. Скоростно-силовые свойства мышц человека при спортивных локомоциях: Диссертация доктора биологических наук: 03.00.13: М, 2004 438 с. РГБ ОД, 71:05−3/189
- Гриценко Г. П., Морейнис И. Ш. Суставные моменты и мощности мышечных сил при ходьбе// Протезирование и протезостроение, 1974, вып. XXXIII. стр. 80−84.
- Гурфинкель B.C., Сафронов В. А. Устройство для измерения моментов инерции различных частей тела человека. Авторское свидетельство № 255 483. Бюллетень «Изобретения, пром. образцы и товарные знаки», 1969, № 33.
- Зациорский В.М., АрутинА.С, Селуянов В. Н. Биомеханика двигательного аппарата человека. -М.: Физкультура и спорт, 1981. 143 с.
- Иоффе М.Л. Кинематика плоского движения коленного сустава человека (Сколько степеней свободы имеет коленный сустав?) // Российский журнал биомеханики, 2008. Том. 12. № 1 (39): 59−67.
- Кручинин П. А., Мишанов А. Ю., Кудряшов О. Э. Алгоритм восстановления показаний системы видеоанализа движений человека по измерениям силовой платформы // Вестник МГУ. Математика. Механика. 2008 (принято к опубликованию)
- Кручинин П.А., Мишанов А. Ю. Математическое моделирование движения и комплексирование измерительной информации в биомеханике // Биомеханика-2008 IX Всероссийская конференция по биомеханике. Тезисы докладов. Нижний Новгород. ИПФ РАН, 2008, с 117−119.
- Кручинин П.А., Мишанов А. Ю. О комплексировании измерительной информации при биомеханических измерениях // Мехатроника, автоматизация, управление 2007. Материалы международной научно-технической конференцию — Таганрог. Изд-во ТТИ ЮФУ. 2007, с. 228 231.
- Липовский В.И., Морейнис И. Ш. Биомеханика. Труды РНИИТО, вып. XIII Рига, 1975, с. 232−234.
- Лоусон Ч., Хенсон Р. Численное решение задач методом наименьших квадратов. -М.: Наука, 1986.
- Орлов И.В., Гусев В. М., Долгобородов С. Г., Щупляков B.C. О возможности коррекции вертикальной позиции человека с помощью биологической обратной связи. Сенсорные системы, 2003, т. 17, № 1, с. 58−67.
- Прилуцкий Б.И., Зациорский В. М. Нахождение усилий мышц человека по заданному движению. В сб.: Современные проблемы биомеханики. Вып. 7. Нижний Новгород, 1993, с. 81−123.
- Роен И.В., Иокочи К., Лютьен-Дреколл Э. Большой анатомический атлас Издательства: Астрель, ACT, 2003 г.
- Рудаков Р.Н. Новый метод обработки видеозаписей движения спортсменов и спортивных снарядов / Р. Н. Рудаков // Российский журнал биомеханики, 2004. Том. 8. N 1.
- Скворцов Д.В. Клинический анализ движений. Стабилометрия: -М.:АОЗТ «Антидор» 2000. 192 с.
- Скворцов Д.В. Стабилометрия функциональная диагностика функции равновесия опорно-двигательной системы и сенсорных систем // Функциональная диагностика М. № 3 за 2004
- Слива С.С., Отечественная компьютерная стабилография: технический уровень, функциональные возможности и области применения, ЗАО «ОКБ «РИТМ», г. Таганрог
- Слива С.С. Проблемы становления отечественной компьютерной стабилографии// V Всероссийская конференция по биомеханике: тез. докладов. Нижний Новгород, 2000. — С.53−55.
- Слива С.С. Компьютерная стабилография в восстановительной медицине и реабилитологии. (ЗАО «ОКБ «РИТМ», г. Таганрог) // II. С.92
- Слива С.С. Экспресс-оценка функционального состояния человека методами компьютерной стабилографии. (ЗАО «ОКБ «РИТМ», г. Таганрог) //Ш.-С.588
- Терехов А.В. Механизмы регуляции вертикальной позы человека. Москва 2007
- Терехов А.В., Забелин А. В. К выбору механической модели антропоморфного многозвенника //Биомеханика 2004 VII Всероссийская конференция по биомеханике. Тезисы докладов. Нижний Новгород. ИПФ РАН. 2004. С 135−136.
- Хемминг Р.В. Цифровые фильтры. — М. :Советское радио. 1980.
- Barter J.T. Estimation of the mass of body segments: WADC Technical Report 57−260. Wright — Patterson Air Force Base. Ohio, 1957.
- Casper R.M. On the use of gamma ray images for determination of human body segment parameters. Unpublished master’s thesis, Pennsylvania State University, 1971.
- Cerveri P., Pedotti A., Ferrigno G. Robust recovery of human motion from video using Kalman filters and virtual humans. Human Movement Science 22 (2003) 377−404
- Clauser C., McConville J., Young J. Weight, volume and center of mass of segments of the human body. AMRL T.R. 69−70, Wright Patterson Air Force Base, Ohio, 1969.
- Contini R. Body segment parameters. Technical Report, 1584.03. New York. -Univer. School. ofEngin. and Science, June, 1970.
- Felix E. Zajac, Richard R. Neptune, Steven A. Kautz. Biomechanics and muscle coordination of human walking. Part I: Introduction to concepts, power transfer, dynamics and simulations. Gait and Posture 16 (2002) 215−232
- Felix E. Zajac, Richard R. Neptune, Steven A. Kautz. Biomechanics and muscle coordination of human walking. Part II: Lessons from dynamical simulations and clinical implications. Gait and Posture 17 (2003) 1−17
- Hanavan E.P. A mathematical model of the human body. — AMRL Technical Report 64−102, Wright Patterson Air Force Base, Ohio, 1964.
- Harless E. Abhandlungen der Mathemat. Physikalischen Classe der Koeniglichen Bayerischen Akademie der Wissenschaften, 1860, Bd. 8, S. 6996, 257−294.
- Hay J., Dapena J. et al. J. Biomechanics, 1977, v. 10, p. 269−277.
- Kapteyn T.S., Bles W., Njiokiktjien Ch.J. et al. Standardization in platform stabilometry being a part of posturography // Agressologie, 1983.- N24, Vol.7.-p.321−326.
- Kjeldsen K. Body segment weights, limb lengths and location of the center of gravity in college women. M.S. Thesis. University of Massachusetts, 1972.