Моделирование замкнутой нелинейной системы
Если имеется достаточный запас ресурса управления, — VK~'L~' |<1, то введение ограничителя на выходе интегратора не вызывает никаких проблем. Например, если — VK~'L~] |< 0,1, то целесообразно на выходе интегратора установить ограничитель на уровень, как минимум, меньше Ы2, что позволит «предоставить» не менее половины диапазона управляющего воздействия для пропорционального и дифференцирующего… Читать ещё >
Моделирование замкнутой нелинейной системы (реферат, курсовая, диплом, контрольная)
Изложенного в предыдущих разделах материала достаточно для понимания и усвоения методов и средств моделирования в программной среде VisSim. Поэтому читателям предлагается самостоятельно осуществить моделирование интересующих их замкнутых систем на основе объектов, часть математической модели которых составляют нелинейные звенья. Рассмотрим только некоторые особые аспекты, возникающие в связи с нелинейностью типа «насыщение» (т. е. «ограничение входного сигнала»).
Пример 8. Решение проблемы насыщения интегратора.
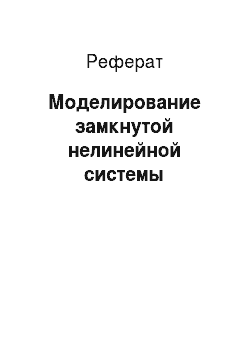
В ряде работ [3; 4] предлагается метод ослабления эффекта интегрального насыщения отслеживанием состояния исполнительного устройства, входящего в насыщение, и компенсированием сигнала, подаваемого на вход интегратора. Утверждается, что если исполнительное устройство входит в насыщение, то «сигнал на входе интегратора уменьшает на величину ошибки, что приводит к замедлению роста сигнала на выходе интегратора, уменьшение сигнала рассогласования и величины выброса на переходной характеристике [3]. Соответствующая структурная схема показана на рис. 3.13.
![Метод компенсации насыщения интегратора по [3; 4].](/img/s/8/68/1310868_1.png)
Рис. 3.13. Метод компенсации насыщения интегратора по [3; 4].
Нами проведено модельное исследование этого метода применительно к объектам рассмотренной выше структуры, а также для объектов без запаздывания, но с ярко выраженным ограничением. На его основании можно сделать следующие выводы.
1. Проблема насыщения интегратора возникает лишь при значении коэффициента интегрального канала, достаточно далекого от оптималыюго значения, которое может быть рассчитано по методике, рассмотренной в работе [5]. На рис. 3.14, а показаны характерные графики переходных процессов. Процесс с перерегулированием ~ 5% - результат оптимизации, другие процессы — с различными значениями Тх.
На рис. 3.14,6 показаны процессы с увеличением перерегулирования вследствие увеличения коэффициента интегрального тракта свыше оптимального значения в 2, 4 и 5 раз, причем управляющий сигнал при этом еще не достигает уровня ограничения, а при оптимизации регулятора по модели, содержащей ограничитель по методике работы [5], указанной проблемы «насыщения интегратора» не возникает.

Рис. 3.14. Переходные процессы в системе рис. 2.56:
а — влияние величины Ts; 6 — влияние коэффициент интегратора в сравнении с оптимальным коэффициентом по [1].
2. Если ограничитель не учтен при проектировании регулятора, то проблемы могут возникнуть необязательно в связи с интегральным трактом управления. Сходная проблема может быть порождена и дифференцирующим трактом, причем ограничение сигнала дифференцирующего тракта сказывается на качестве переходного процесса более фатально.
Структура рис. 3.13 начинает работать в соответствии с использованной идеей лишь после вхождения ограничителя в режим ограничения, причем независимо от причины обратная связь воздействует именно на интегратор. Гораздо эффективней применить дополнительный ограничитель на выходе интегратора, причем порог ограничения следует задавать меньшим, чем уровень ограничителя на входе объекта, чтобы выходной сигнал интегратора не препятствовал прохождению выходного сигнала остальных компонент регулятора. Предлагаемая структура приведена на рис. 3.15.
Проблема насыщения интегрального усилителя тесно связана с коэффициентом усиления объекта и значением предписанной величины. Естественно, предписанная выходная величина Г, деленная на коэффициент усиления объекта К, должна быть меньше величины ограничения на входе объекта L, иначе невозможно достичь на выходе ipeбуемого значения.
Если имеется достаточный запас ресурса управления, | VK~'L~' |<1, то введение ограничителя на выходе интегратора не вызывает никаких проблем. Например, если | VK~'L~] |< 0,1, то целесообразно на выходе интегратора установить ограничитель на уровень, как минимум, меньше Ы2, что позволит «предоставить» не менее половины диапазона управляющего воздействия для пропорционального и дифференцирующего трактов. Это соображение обосновывается тем, что интегратор действует преимущественно в статическом режиме, который описывается статическим коэффициентом объекта и установившимся значением предписанной величины V, эти две величины определяют требуемый выходной сигнал интегратора в статическом режиме, достижение этим сигналом существенно большего значения на выходе не требуется.
В случае оптимизации регулятора с учетом ограничителя уменьшение впоследствии уровня ограничения в 3 раза несколько ухудшает переходный процесс, не порождает существенных проблем: несмотря на то, что управляющий сиг нал на начальном участке ограничивается, устойчивость не нарушается, лишь слегка возрастает перерегулирование (8% против исходных 5%) и увеличивается время вхождения в 1%-ю зону.

Рис. 3.15. Альтернативный метод преодоления проблемы насыщения интегратора.
Проблема насыщения дифференцирующего тракта наиболее эффективно решается введением ограничения полосы частот этого тракта.