Матрица жесткости произвольно ориентированного элемента
Каждому узловому перемещению соответствует узловая нагрузка, совпадающая по направлению с соответствующим перемещением, поэтому для узловых нагрузок справедливо выражение, аналогичное выражению (22.4): Каждое перемещение в глобальных осях координат складывается из суммы проекций на соответствующую глобальную ось узловых перемещений в локальных осях координат: ХУ — глобальные оси координат, единые… Читать ещё >
Матрица жесткости произвольно ориентированного элемента (реферат, курсовая, диплом, контрольная)
Рассмотрим, как изменится матрица жесткости плоского стержневого элемента при повороте осей координат. Сначала рассмотрим изменение узловых перемещений при повороте осей координат. В системе координат ху узловые перемещения элемента А, Д2,…" Д6.

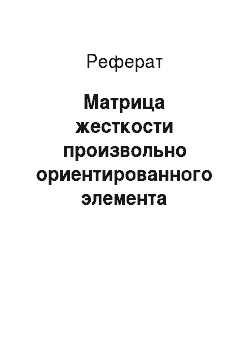
Рис. 22.8. Узловые перемещения элемента в локальной ху и глобальной ху системах координат Развернем оси координат на угол, а (рис. 22.8). Определим величину узловых перемещений Д в новой повернутой системе координат. Введем новые понятия и обозначения:
ху — локальные оси координат.
Локальная ось х всегда совпадает с осью элемента;
ХУ — глобальные оси координат, единые оси координат для всей стержневой системы. Положение глобальных осей выбирают из соображения удобства расчета;
Косинусы углов между локальными и глобальными осями координат (направляющие косинусы):

Каждое перемещение в глобальных осях координат складывается из суммы проекций на соответствующую глобальную ось узловых перемещений в локальных осях координат:

Перемещения во втором узле не влияют на перемещения первого узла.
Представим то же выражение в матричном виде:  где
где  — матрица направляющих косинусов.
— матрица направляющих косинусов.
Каждому узловому перемещению соответствует узловая нагрузка, совпадающая по направлению с соответствующим перемещением, поэтому для узловых нагрузок справедливо выражение, аналогичное выражению (22.4):


Перейдем к определению матрицы жесткости. Запишем основное уравнение матричного метода перемещений в локальной.

и в глобальной системах координат найдем связь между матрицами жесткости | А'] И UJ.
Подставим выражения (22.9) и (22.10) в уравнение (22.11): Ll]{f}= [АГ][?]{д}. Полученное выражение умножим слева на 
Учтем, что [L] 1 [А] = [?] — единичная матрица (эквивалент умножения на единицу). Тогда {/г}= [b [к ][L]{д} .
Матрица направляющих косинусов ортогональная, для нее [А]-1 = [L]T. С учетом этого.

Сопоставляя выражения (22.12) и (22.13), видим, что.

Выражение (22.14) представляет собой связь между матрицами жесткости стержневого элемента в локальной [А'] и глобальной [к] системах координат.