Проектирование кусочно-адаптивного регулятора
Определение ситуации отнесения модели к одному из заранее заданных классов также намного проще, чем определение всей модели объекта полностью. В итоге две сложные процедуры (идентификация модели объекта и расчет модели регулятора) заменяются на две простые процедуры (отнесение модели объекта к выбранному классу и выбор модели регулятора в зависимости от этого класса). Нестационарные свойства… Читать ещё >
Проектирование кусочно-адаптивного регулятора (реферат, курсовая, диплом, контрольная)
Робастная система как прототип адаптивной системы
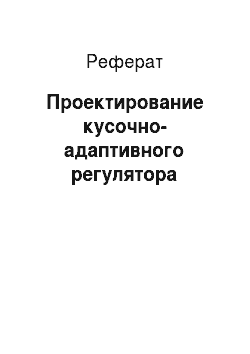
Один из методов расчета робастного регулятора рассмотрен в параграфе 6.3. Он состоит в оптимизации при одновременном моделировании совокупности систем с одинаковыми регуляторами, но разными объектами, описываемыми наиболее характерными моделями из множества возможных моделей этого объекта. Главная идея этого подхода состоит в том, чтобы одинаковыми регуляторами обеспечить устойчивость замкнутых систем не только с объектом с номинальными параметрами, но и с выбранными образцами моделей объекта с измененными параметрами. Если при численной оптимизации регулятора для единственного объекта в качестве критерия оптимальности используется интегральный критерий качества системы, то при численной оптимизации одного регулятора для множества объектов следует применять сумму этих критериев. Для обеспечения требуемого качества системы при различных значениях параметров объекта предложено использовать множество объектов, описываемых моделью регулятора, каждый из которых характеризуется различными значениями параметров, как показано на рис. 11.1.

Рис. 11.1. Схема оптимизации регулятора:
1,2 — модели объекта с разными значениями параметров; 3,4 — идентичные модели регуляторов; 5 — формирователь тестового воздействия; 6 — анализатор качества систем; 7 — оптимизатор параметров регулятора Для каждого из таких объектов моделируется идентичный регулятор. Его параметры вычисляются методом оптимизации по критерию, в который входит сумма ошибок всех систем множества.
Ранее в параграфе 6.3 проанализирован метод проектирования робастной системы для объекта, обладающего ярко выраженными нестационарными свойствами. Особенности робастного регулятора состоят в том, что он должен обеспечить устойчивое управление с приемлемым качеством при условии, что параметры модели объекта изменяются или известны недостаточно точно. Причем эта успешность управления достигается не за счет изменений модели регулятора, а за счет отыскания такой его универсальной модели, которая бы обеспечивала решение поставленной задачи при любых возможных сочетаниях параметров модели объекта. Очевидно, что решение поставленной задачи успешного управления таким методом может быть недостижимо.
В отличие от робастных регуляторов адаптивные регуляторы могут изменять параметры своей математической модели в зависимости от текущих параметров модели объекта. Класс задач, которые могут быть решены таким путем, существенно шире, а результаты могут быть значительно лучшими. Но проектирование адаптивных регуляторов намного труднее, чем проектирование робастных регуляторов.
Основная трудность реализации адаптивных систем состоит, во-первых, в определении текущей модели объекта, а во-вторых — в расчете для этой текущей модели наилучшего регулятора.
Упрощение метода решения этой задачи может быть достигнуто разбиением вариантов возможных математических моделей объекта на счетное множество и использованием метода робастного управления в пределах этого множества. В этом случае частная подзадача робастного управления упрощается по сравнению с попыткой обеспечения требуемых свойств системой с помощью единственного робастного регулятора. При этом детальной идентификации всех параметров объекта в этом случае уже не требуется, поскольку достаточно обеспечить лишь распознавание характерных признаков модели объекта, достаточных для отнесения текущей модели к одному из предварительно выделенных классов.
Пусть, например, объект управления имеет математическую модель в виде передаточной функции W0(s), например

Нестационарные свойства объекта состоят в том, что в некоторых заранее известных пределах могут изменяться все входящие в эту функцию параметры его модели, а именно: к — коэффициент усиления; Г — постоянная времени; п — порядок модели; т — постоянная времени звена запаздывания.
Выходной сигнал объекта Y (t) должен как можно более точно совпадать с заданием V (t), на объект воздействует неизвестная помеха, а параметры модели объекта медленно (т.е. в 100—1000 раз медленнее темпов изменения выходных сигналов объекта) и неизвестным образом изменяются во времени.
Если параметры передаточной функции (11.1) изменяются во времени, то робастный регулятор остается неизменным, тогда как адаптивный регулятор должен изменяться в зависимости от этих изменений:

Кусочно-робастный регулятор в нашей концепции — это регулятор, структура (математическая модель) которого зависит от одного параметра — номера подмножества, к которому отнесено текущее состояние модели объекта. В случае кусочно-робастного регулятора все коэффициенты регулятора могут быть взяты из заранее рассчитанной таблицы, т. е. быть фиксированными из наперед заданного подмножества. Это намного проще, чем непрерывный расчет новых коэффициентов, исходя из множества вновь определенных параметров модели объекта.
Определение ситуации отнесения модели к одному из заранее заданных классов также намного проще, чем определение всей модели объекта полностью. В итоге две сложные процедуры (идентификация модели объекта и расчет модели регулятора) заменяются на две простые процедуры (отнесение модели объекта к выбранному классу и выбор модели регулятора в зависимости от этого класса).