Расчет статически неопределимых систем методом перемещений
Для упрощения расчета используем общепринятые и ранее сформулированные допущения о пренебрежении продольными деформациями в изгибаемых стержнях и о малости деформаций по сравнению с размерами сооружения. В силу этих допущений жесткие узлы рассматриваемой рамы остаются прямыми, горизонтальные смещения узлов С и D считаются одинаковыми, углы поворота жестких узлов в силу их малости определяются… Читать ещё >
Расчет статически неопределимых систем методом перемещений (реферат, курсовая, диплом, контрольная)
В результате освоения данной главы студент должен:
знать
- • общую идею расчета статически неопределимых расчетных схем методом перемещений;
- • принципы получения основной системы метода перемещений;
- • общую последовательность расчета статически неопределимых расчетных схем методом перемещений;
- • общие принципы упрощений при расчете методом перемещений при учете симметрии и использовании основной системы без постановки линейных связей;
уметь
• производить расчеты статически неопределимых систем методом перемещений от различных воздействий;
владеть
• навыками рациональной установки дополнительных связей при получении основной системы метода перемещений.
Основные положения. Степень кинематической неопределимости
Метод перемещений является вторым основным классическим методом расчета статически неопределимых систем. Основными неизвестными в этом методе являются угловые и линейные смещения узлов расчетной схемы (рис. 14.1), что и определило его название. Во многих случаях метод перемещений эффективнее метода сил.
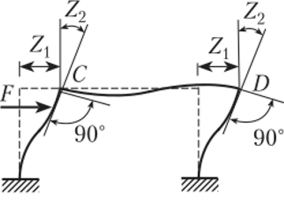
Рис. 14.1.
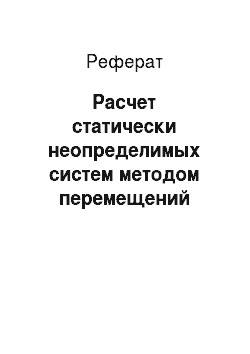
Рассмотрим деформированное состояние статически неопределимой рамы (см. рис. 14.1) при действии внешней нагрузки.
Для упрощения расчета используем общепринятые и ранее сформулированные допущения о пренебрежении продольными деформациями в изгибаемых стержнях и о малости деформаций по сравнению с размерами сооружения. В силу этих допущений жесткие узлы рассматриваемой рамы остаются прямыми, горизонтальные смещения узлов С и D считаются одинаковыми, углы поворота жестких узлов в силу их малости определяются по тангенсу угла, сближением концов стержней при их изгибе пренебрегаем (например, узлы С и D по вертикали не перемещаются).
Для того чтобы применить метод перемещений, необходимо знать степень упругой подвижности узлов расчетной схемы (степень кинематической неопределимости), включающую количество независимых угловых и линейных перемещений всех узлов:

пу — число жестких узлов расчетной схемы, способных к повороту при ее деформации; пл — степень линейной подвижности всех узлов схемы.
Применение формулы (14.1) покажем на примере рамы, изображенной на рис. 14.2, а.
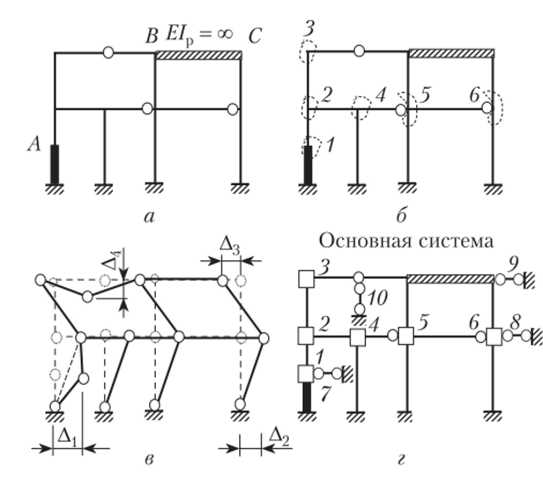
Рис. 14.2.
Рама имеет как полностью жесткие, так и комбинированные узлы. В число пу включаются лишь жесткие соединения стержней. Кроме этого узлами считаются места ступенчатого изменения жесткостных характеристик (узел А). Ригель ВС в представленной схеме показан абсолютно жестким, т. е. не изгибаемым, поэтому узлы В и С не способны к повороту. Все жесткие узлы, способные к повороту при деформации рассматриваемой рамы, отмечены пунктиром на рис. 14.2, б. Таким образом, для данной рамы пу = 6.
Степень линейной подвижности может быть определена как степень свободы шарнирного механизма, полученного из заданной схемы рамы путем введения сквозных шарниров во все ее узлы, включая опорные:

Для рассматриваемой рамы (рис. 14.2, в): У = 13, Сф = 14, Соп = 8, поэтому пл = 2 • 13 — (14 + 8) = 4, а степень кинематической неопределимости пк = пу + пл = 6 + 4 = 10.
В случае простых схем (см. рис. 14.1) число линейных смещений узлов определяется непосредственно из анализа возможной схемы деформированного состояния, и использование формулы (14.2) не обязательно.
В отличие от метода сил, рассмотренного в гл. 13, основная система метода перемещений получается не удалением, а введением дополнительных связей по направлению возможных смещений узлов расчетной схемы, как угловых, так и линейных. В результате все узлы расчетной схемы становятся неподвижными. Основная система, получаемая введением дополнительных связей по направлению возможных смещений узлов, называется кинематически определимой.
В качестве вводимых дополнительных связей применяются жесткие линейные связи, устраняющие линейные перемещения узлов, и «плавающие» заделки, устраняющие повороты узлов. Термин «плавающая заделка» применяется в том смысле, что она может иметь линейные смещения, т. е. свободно перемещаться вместе с узлом, но не может поворачиваться до тех пор, пока ей не будет принудительно сообщен поворот. В соответствии с изложенным в качестве неизвестных принимаются линейные смещения и углы поворота по направлению введенных дополнительных связей.
Для рамы, приведенной па рис. 14.2, а, основная система показана на рис. 14.2, г.
В отличие от основной системы метода сил кинематически определимая основная система единственна, т. е. в ней может меняться лишь место установки какой-либо линейной связи. Например, дополнительная горизонтальная связь 8 (рис. 14.2, г) может быть установлена в любом из узлов первого этажа рамы.
Рис. 143.
В результате введения дополнительных связей расчетная схема превращается в набор отдельных прямолинейных стержней постоянного сечения двух типов (рис. 14.3). Указанные стержни являются простыми статически неопределимыми однопролетными балками, которые могут быть рассчитаны от любого воздействия методом сил. Результаты таких расчетов в общем виде обычно сводятся в специальные таблицы, называемые таблицами реакций (см. прил. 10 и 11). В прил. 10 все значения реакций выражены через отношение жесткости стержня при изгибе к его длине i = EI / /, называемое относительной жесткостью стержня.