Автоматизированные системы управления, системы автоматики и автоматического управления и их технические средства
В качестве простого примера рассмотрим «технологический процесс» управления скоростью и направлением движения корабля. Оба этих параметра задают операторы (капитан и рулевой). Предположим, что эти параметры (команды) на некотором временном интервале фиксированы. Обратимся к управлению направлением движения корабля. На рис. 1.1, б представлена функциональная схема САУ, реализующая подобное… Читать ещё >
Автоматизированные системы управления, системы автоматики и автоматического управления и их технические средства (реферат, курсовая, диплом, контрольная)
В результате изучения материала главы 1 студент должен:
знать
- • современные тенденции развития электроники, измерительной и вычислительной техники, информационных технологий в своей профессиональной деятельности;
- • методы сбора и анализа научно-технической информации, обобщения отечественного и зарубежного опыта в области средств автоматизации и управления, проведения анализа патентной литературы;
уметь
• участвовать в подготовке технико-экономического обоснования проектов создания систем и средств автоматизации и управления;
владеть
• основными методами, способами и средствами получения, хранения, переработки информации, иметь навыки работы с компьютером как средством управления информацией.
Классификации автоматизированных систем управления и систем автоматического управления. Обобщенные функциональные схемы. Понятие «SCADA-система».
Стремительное развитие управляющей вычислительной техники во второй половине XX в. позволило успешно осуществлять комплексную автоматизацию не только в сферах материального производства, но и в документообороте, военном деле и сфере научных исследований. Помимо широко распространенных к тому времени таких понятий, как автоматические системы и системы автоматического управления, появляются автоматизированные системы управления, к которым относятся автоматизированные системы управления предприятием, автоматизированные системы управления технологическими процессами, автоматизированные системы научных исследований и ряд других систем. Характерной особенностью любых АСУ является наличие в составе таких систем человека (оператора, исследователя или лица, принимающего решение (ЛПР)). Эта особенность отличает их от СА и САУ, которые полностью исключают участие человека в процессе управления. Вместе с тем в большинстве случаев АСУ, такие как АСУТП или АСНИ, могут содержать в своем составе различного рода С, А и САУ.
Поясним сказанное, дав некоторые определения и рассмотрев примеры.
В любом автоматизированном комплексе можно выделить следующие основные компоненты.
- 1. Объект (О) автоматизации или объект управления (ОУ), который должен воспринимать и соответствующим образом реагировать на управляющие воздействия. В качестве объектов могут выступать:
- а) физические объекты:
- • технические комплексы и установки с управляемым технологическим процессом,
- • простые и сложные транспортные средства,
- • новые материалы и образцы приборов,
- • конструкции, испытываемые на прочность;
- б) физические модели объектов, например аэродинамическая труба с макетом самолета;
- в) математические модели, реализованные на аналоговых или цифровых электронно-вычислительных машинах (ЭВМ).
- а) физические объекты:
- 2. Исполнительные устройства (ИУ), или устройства непосредственного управления, объектом служат для изменения состояния объекта в соответствии с сигналами управления на их входах. В качестве И У могут выступать исполнительные двигатели разных типов (ДВ), клапаны, переключатели и т. п. В состав ИУ могут также входить усилители мощности (УМ) и усилительно-преобразовательные устройства (УПУ), обеспечивающие согласование и усиление входных сигналов, поступающих на ИУ.
- 3. Датчики (Д), или устройства измерения параметров объекта (технологического процесса), служат для преобразования информации об объекте в форму, удобную для дальнейшего использования, — обычно в электрический сигнал. В автоматизированных системах измеряются различные физические величины: напряжение, ток, температура, давление, линейные или угловые перемещения и т. д.
Под управлением будем понимать некий процесс, обеспечивающий достижение поставленной цели. Управление техническими объектами можно разделить на три вида: ручное, автоматическое и автоматизированное. Ручное управление далее не рассматривается.
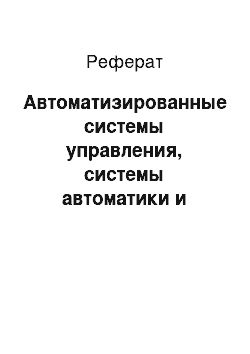
Автоматическое управление включает в себя две группы систем управления объектом, показанные на рис. 1.1. Это системы автоматики (СА), работающие по разомкнутому циклу, и замкнутые системы автоматического управления (САУ), помеченные на рис. 1.1 соответственно как а и б.
Системы автоматики — эго системы автоматического контроля, сигнализации, пуска и остановки агрегатов, блокировки и защиты (см. рис. 1.1, я), которые обеспечивают безаварийную работу технологического оборудова.

ние. 1.1. Две группы автоматических систем
ния, страхуют обслуживающий персонал от ошибочных действий и оперативно дают ему информацию о предельных значениях параметров технологического процесса. Для реализации подобных систем используются соответствующие датчики, индикаторы и автоматические выключатели.
К значительно более сложным автоматическим системам следует отнести САУ (см. рис. 1.1, в). Подобные системы во многих случаях являются так называемыми локальными автоматическими системами в составе общей АСУТП, обеспечивающей управление технологическим процессом сложного объекта.
В качестве простого примера рассмотрим «технологический процесс» управления скоростью и направлением движения корабля. Оба этих параметра задают операторы (капитан и рулевой). Предположим, что эти параметры (команды) на некотором временном интервале фиксированы. Обратимся к управлению направлением движения корабля. На рис. 1.1, б представлена функциональная схема САУ, реализующая подобное управление. Сигнал управления X, задающий угол поворота руля корабля, поступает от штурвала рулевого после соответствующего преобразования в виде электрического сигнала на вход устройства сравнения (УС) САУ. Блок 3 на схеме — это задающее устройство (в данном примере — сам рулевой). На УС также поступает сигнал отрицательной обратной связи Y отдатчика (Д) углового положения руля корабля. Если разность этих сигналов А, которая в теории автоматического управления называется ошибкой, не будет равна нулю, то эта разность, пройдя усилительно-преобразовательное устройство (УПУ) и усилитель мощности (УМ), поступает на двигатель (ДВ).
В качестве УПУ во многих системах используются промышленные контроллеры (ПК), которые также могут выполнять функции усилителя мощности. Двигатель через силовой редуктор будет разворачивать руль корабля (на схеме обозначен как О — объект управления) до тех пор, пока сигнал Y от датчика на руле корабля не станет равным задающему сигналу X. Это самый распространенный в САУ принцип управления «по отклонению». Достоинством такого принципа управления является то, что САУ «отрабатывает» не только сигнал управления X, но и компенсирует влияние возмущения F. В рассматриваемом примере это дополнительные механические моменты, действующие на руль корабля, связанные с подводными течениями, турбулентностью и т. д.
Фактически рассматриваемая САУ является усилителем мощности. Подобные системы называют «следящими системами», или «сервосистемами». Аналогично, укрупненно можно составить функциональную схему управления скоростью движения судна. Составляющие функциональные блоки могут быть значительно сложнее, но в контуре обязательно сохранится отрицательная обратная связь.
Отметим, что СА и САУ принципиально исключают участие человека в процессе управления объектом (исключение составляет формирование сигнала уставки в САУ).
Автоматизированные системы управления технологическими процессами в технических объектах строится по функциональной схеме, показанной на рис. 1.2.

Рис. 1.2. Функциональная схема АСУТП.
На схеме следует выделить два уровня управления: нижний и верхний.
Нижний уровень управления образуется самим объектом управления, датчиками (Д) состояния объекта и исполнительными устройствами (ИУ), включающими в себя требуемые усилители мощности и усилительно-преобразовательные устройства. Этот уровень управления может включать в себя СА и САУ, рассмотренные выше. На схеме пунктиром показана возможность использования сигналов датчиков Y для формирования отрицательных обратных связей САУ. Подобные локальные САУ образуют нижний уровень управления АСУТП сложными техническими объектами.
Верхний уровень управления содержит управляющую ЭВМ, или программируемый логический контроллер (ПЛК) с доступом к ним оператора и устройства сопряжения с объектом (УСО). Программируемый логический контроллер по существу является управляющей ЭВМ, но, в отличие от универсальной ЭВМ, реализует определенную, ограниченную часть функций последней. Массовое производство различных ПЛК позволяет во многих случаях реализовывать более дешевые и более производительные структуры АСУТП с использованием сети ПЛК. Вместе с тем знание основных принципов построения АСУТП на базе универсальных ЭВМ позволяет грамотно и оптимально строить АСУТП с использованием ПЛК. Именно поэтому далее, в гл. 5 рассматриваются эти принципы применительно к АСУТП на базе универсальных ЭВМ, а гл. 6 целиком посвящена особенностям реализации таких принципов на ПЛК.
Любая АСУТП — это совокупность технических и программных средств для: управления объектом автоматизации, измерения его параметров, обработки хранения и отображения информации. Для нее характерны задачи измерения параметров объекта автоматизации в реальном времени и управления объектом в соответствии с сигналами, поступающими с датчиков объекта.
Устройства сопряжения с объектом соединяются с внутренней шиной компьютера одним из следующих способов:
- 1) через один из слотов расширения, имеющийся в любой ЭВМ;
- 2) через последовательный или параллельный порт, также входящие в состав ЭВМ;
- 3) через унифицированную последовательную или параллельную интерфейсную шину, специально предназначенную для подключения к ЭВМ.
Отметим, что ПЛК, как управляющие ЭВМ, уже снабжены УСО в виде точек входа/выхода, к которым непосредственно подключаются датчики и маломощные ИУ. Для передачи информации часто используются пакетные (Ethernet) технологии передачи данных по локальной компьютерной сети.
При управлении И У большой мощности к выходам ПЛК подключаются УПУ или УМ.
Аппаратные средства У СО на входе, как правило, только преобразуют входные аналоговые сигналы в цифровой код и посылают его в компьютер. Эти функции У СО могут выполнять самостоятельно некоторые виды датчиков со встроенными микропроцессорами. Отдельно эти виды датчиков в учебнике не рассматриваются. Задача вычисления исходных значений входных сигналов оставляется прикладному ПО, которое находится в компьютере.
Программное обеспечение ЭВМ (ПЛК) должно содержать:
- 1) программы для управления аппаратными средствами У СО, называемые драйверами устройств;
- 2) прикладное ПО, которое выполняет различные виды обработки сигналов.
Драйверы включают набор команд управления У СО и уникальны для каждого типа устройств. Они решают следующие задачи:
- • конфигурирование аппаратуры У СО;
- • запуск аппаратуры У СО на выполнение требуемой функции, например измерение сигналов объекта автоматизации или формирование управляющих сигналов на входах объекта;
- • передача данных между У СО и оперативным запоминающим устройством (ОЗУ) ЭВМ.
Устройства сопряжения с объектом с помощью драйверов управляют объектом автоматизации, измеряют сигналы датчиков и в ряде случаев отображают данные.
Прикладное ПО обеспечивает выработку и посылку команд драйверам, получение ответа о результате их выполнения, анализ, обработку и отображение получаемых данных. Роль прикладного ПО играет пользовательское приложение, которое решает перечисленные задачи.
При использовании универсальной ЭВМ для построения АСУТП пользователи не ограничены типами устройств, которыми можно управлять. В этом случае можно сочетать и согласовывать между собой устройства различных категорий, такие как: внутримашинные, последовательные интерфейсы, унифицированные интерфейсные шины (например, КАМАК[1]), параллельные порты и др.
Будем далее условно относить к системам автоматизированного управления предприятием (АСУП) такие, которые не содержат двусторонних средств непосредственной связи с объектом автоматизации. В зависимости от наличия или отсутствия односторонних связей АСУП с объектом возможны три варианта систем:
- 1) АСУП, не содержащие средств непосредственного сопряжения с объектом ни по входам, ни по выходам. Они предназначены для обработки информации вне реального времени. Параметры объекта оператор может вводить в систему вручную, а результаты обработки информации использовать для ручного управления объектом;
- 2) АСУП, содержащие только средства ввода информации от объекта в систему. Они предназначены для регистрации информации, поступающей с объекта в реальном времени (в темпе ее поступления) и ее дальнейшей обработки. Управление объектом, если возможно, выполняется оператором вручную;
- 3) АСУП, содержащие только средства непосредственного вывода управляющей информации на ОУ. Они предназначены для программного управления объектом.
Таким образом, АСУТП, в отличие от АСУП, — это системы, имеющие и средства непосредственного ввода информации с объекта и средства непосредственного вывода управляющих сигналов на объект. Они образуют замкнутые автоматизированные системы, обеспечивающие автоматический сбор информации, ее обработку и управление объектом автоматизации.
Например, управление выходными параметрами парогенератора тепловой электрической станции (ТЭС), такими как температура, давление и объем генерируемого пара, а также количество и состав примесей в отходящих газах, регулируется совместно работающими САУ подачи топлива, воды, воздуха, регуляторами температуры пара. Параллельная работа парогенераторов и турбогенераторов на ТЭС осуществляется через общий диспетчерский центр, который в итоге отслеживает качество вырабатываемой электрической энергии. Таким образом, ТЭС оказывается АСУ, которая, по существу, сочетает АСУП с рядом АСУТП, СЛ и САУ на нижнем уровне.
Аббревиатура «SCADA — supervisory control and data acquisition» в дословном переводе — «диспетчерский контроль и сбор данных». Понятие «SCADAсистема» на момент написания книги имеет двойную интерпретацию:
- 1) как вся система АСУТП в целом;
- 2) как человеко-машинный интерфейс диспетчерского (HMI — Human Machine Interface) пункта управления и программные средства сбора и хранения данных с ОУ.
Для того чтобы избежать путаницы в терминах, мы будем в дальнейшем употреблять термин SCADA ориентируясь на вторую интерпретацию в соответствии с представленным определением. Всю систему целиком мы называем АСУТП.
Многие разработчики ПО для АСУ предлагают комплексную программную систему, предназначенную для функционирования АСУТП и АСУП. Также предлагаются отдельные программные продукты SCADA (ПО для АСУТП) и продукты ERP — enterprise resource planning (ПО для АСУП). Краткая информация о программных продуктах ERP дается в п. 1.3.3.
- [1] КАМАК (англ. С AM АС) — стандарт, определяющий организацию магистрально-модульной шины, предназначенной для связи измерительных устройств с цифровой аппаратурой обработки данных в системах сбора данных.