Исследование алгоритмов сопровождения траекторий воздушных целей
Известно, что в теории обнаружения и оценивания для решения априорной неопределенности может также использоваться адаптивный подход Байеса. При фильтрации в пространстве состояния этот подход заключается в том, что учитываются все возможные варианты моделей состояния, с каждым вариантом вычисляется её апостериорная вероятность. Применение его к решению задачи сопровождения траекторий… Читать ещё >
Содержание
- Список сокращения
- Глава 1. Анализ фильтров сопровождения траекторий воздушных целей
- 1. 1. Фильтр Калмана
- 1. 2. Применение фильтра Калмана для сопровождения траекторий ВЦ по данным обзорной РЛС
- 1. 3. «Альфа — бета» и «Альфа — бета — гамма» фильтры
- 1. 4. Статистическое моделирование
- 1. 5. Выводы
- Глава 2. Анализ адаптивных методов сопровождения траекторий маневрирующих воздушных целей на основе обнаружителей маневра
- 2. 1. Введение
- 2. 2. Совместное обнаружение и оценивание маневра цели на основе обновляющего процесса
- 2. 3. Адаптивные алгоритмы сопровождения маневрирующих
- ВЦ с использованием обнаружителей маневра
- 2. 4. Выводы
- Глава 3. Исследование известных многомодельных алгоритмов
- 3. 1. Введение
- 3. 2. Адаптивный подход Байеса
- 3. 3. Исследование известного ММА сопровождения траектории ВЦ для обзорной РЛС
- 3. 4. Выводы
- Глава 4. Разработка многомодельного алгоритма сопровождения * траекторий маневрирующих воздушных целей
- 4. 1. Введение
- 4. 2. Оценивание вектора состояния движения ВЦ
- 4. 2. 1. Постановка задачи
- 54. 2. 2. Общий подход к решению задачи
- 04. 2. 3. Линейный алгоритм
- 4. 3. Сравнение ММА с другими алгоритмами
- 4. 4. Выводы
Исследование алгоритмов сопровождения траекторий воздушных целей (реферат, курсовая, диплом, контрольная)
Актуальность темы
диссертации.
Одной из важнейших задач гражданской авиации является повышение безопасности полётов, особенно на этапах взлёта и посадки. Для достижения этой цели, автоматизированные системы управления воздушным движением (АС УВД) должны иметь необходимые показатели качества, которые в определяющей степени зависят от качества поступающей радиолокационной информации. В системе УВД радиолокационная информация от трассовых и аэродромных РЛС используется для управления движением воздушных целей (ВЦ), предупреждения столкновений и управления заходом на посадку. При управлении движением ВЦ необходимо вычислять текущие координаты каждой ВЦ для исключения опасных сближений ВЦ. В противном случае летчикам выдаются команды по коррекции траекторий. В режиме предотвращения столкновений формируется оценка экстраполированных координат, на основе которых определяются зоны опасного сближения. Тем более, что за последние годы возрастает и плотность воздушного движения. Рост плотности воздушного движения приводит к увеличению числа опасных сближений. Предупреждение опасных сближений ВЦ является частью важнейшей задачи гражданской авиацииобеспечения безопасности полётов. При управлении движением ВЦ на этапе захода на посадку РЛС проверяет правильность движения ВЦ по заданным траекториям.
Поэтому вопросы повышения качества радиолокационной информации постоянно привлекают большое внимание. Известно, что после первичной обработки радиолокационной информации процесс вторичной обработки радиолокационной информации (ВОРИ) обычно выполняются программированными алгоритмами цифровой обработки на ЦВМ, и качество потока радиолокационной информации сильно зависит от надежности и точности алгоритмов обработки. Это задача тем более актуальна, если учитываются маневрирования ВЦ на этапах взлёта и посадки, связанные со сменой эшелона, изменением курса и выполнением типовых схем захода на посадку и т. д.
Рассмотрим расположение элементов воздушного пространства района УВД и типовую схему захода на посадку. В гражданской авиации, воздушное пространство разделяется на воздушную трассу — установленное воздушное пространство над поверхностью земли в виде коридора с шириной (10 — 20) км, по которому выполняются регулярные полёты, район аэродрома — воздушное пространство над аэродромом и прилегающей к нему местностью и запретную зону — воздушное пространство, в котором полёты авиации всех ведомств запрещены.
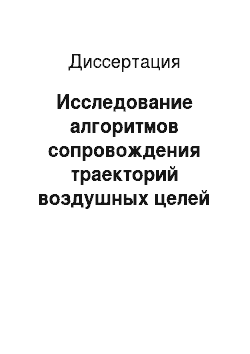
В районе аэродрома организуются воздушные коридоры, зоны взлёта и посадки и зоны ожидания. Воздушный коридор — часть воздушного пространства, в котором ВЦ снижаются и набирают высоту. Зона взлёта и посадки — воздушное пространство от уровня аэродрома до высоты второго безопасного эшелона полёта. Размеры этой зоны определяются летно-техническими характеристиками ВЦ, эксплуатируемых на данном аэродроме, возможностями радиотехнических средств навигации УВД и посадки, схемами захода на посадку и специфическими особенностями района аэродрома. Как правило, границы зоны взлёта и посадки удалены от аэродрома на 25.30 км. Если пилот по каким-либо причинам не посадил ВЦ с первого захода, то ВЦ уходит на второй круг, т. е. движется по специальному маршруту в зоне круга (см. рис. В.1). Если ВЦ не разрешено движение по маршруту захода на посадку из-за временной занятости или неготовности ВПП (взлётно-посадочная полоса), то ВЦ направляется в зону ожидания, предназначенную для ожидания разрешения захода на посадку в районе аэродрома. Эти зоны располагаются над аэродромом либо в 50 — 100 км от него (рис. В.1). Таким образом, в районе аэродрома частота маневрирования ВЦ является большой. Это объясняется тем, что в этом районе существует большая плотность ВЦ, и для поддерживания заданных маршрутов и дистанций они всегда маневрируют из одной зоны в другие.
Рис. В.1. Например, расположение воздушного пространства района УВД.
1 —трассы- 2 — коридоры района аэродрома-3— зона круга- 4—зона взлёта и посадки;
5 — зоны ожидания.
Кроме того, для повышения безопасности ВЦ и пассажиров при приземлении в настоящее время широко применяется схема захода на посадку по «коробочке», при котором перед приземлением ВЦ должны планировать (1−2) круга над аэродромом (рис. В.2). Эта схема состоит из некоторых участков прямолинейного движения и четырёх разворотов на 90 град.
Рис. В.2. Схема захода на посадку по «коробочке».
С другой стороны, состояние и развитие вычислительной техники позволяет применить более сложные и эффективные алгоритмы обработки радиолокационной информации для повышения точности оценивания координат и скорости ВЦ.
Таким образом, исследование алгоритмов сопровождения траекторий ВЦ, обеспечивающих повышение качества радиолокационной информации, являются актуальной проблемой.
При обработке радиолокационной информации особенно актуальной задачей является исследование алгоритмов обработки на участках манёвра ВЦ, которые приводят к несоответствию между реальным движением ВЦ и используемой моделью движения в алгоритме. В результате этого точность результатов оценивания ухудшается, а полученная радиолокационная информация становится ненадежной. Известные подходы к повышению точности сопровождения траектории ВЦ на участках манёвра, в основном, базируются на решении задачи обнаружения начала и окончания манёвра и соответствующем изменении параметров фильтра сопровождения. Это подходы приводят к схеме «альфа — бета» и «альфа — бета — гамма» [29, 34, 35, 46, 82] фильтров, либо фильтра Калмана (ФК) [21−23, 28, 43−45] в сочетании с обнаружителем манёвра.
Известно, что в теории обнаружения и оценивания для решения априорной неопределенности может также использоваться адаптивный подход Байеса. При фильтрации в пространстве состояния этот подход заключается в том, что учитываются все возможные варианты моделей состояния, с каждым вариантом вычисляется её апостериорная вероятность. Применение его к решению задачи сопровождения траекторий маневрирующих ВЦ было развито за последние годы. При этом траектория ВЦ описывается одновременно несколькими моделями и предполагается, что процесс перехода между моделями описывается односвязной цепью Маркова. В литературе [36−40] предложен один вариант к созданию такого алгоритма на основе гауссовской аппроксимации для априорной плотности вероятностей вектора состояния. Его сущность состоит в объединении возможных гипотез моделей, и полученный алгоритм назван «многомодельным алгоритмом» (ММА).
В диссертации проанализированы выше упомянутые подходы, показаны их преимущества и недостатки, и разработан новый ММА. В отличие от известных ММА предложенный алгоритм создан на основе гауссовской аппроксимации для апостериорной плотности вероятностей вектора состояния ВЦ, согласно этому полученный алгоритм обладает преимуществами по сравнению с известными адаптивными алгоритмами. Результат статистического моделирования показал, что исследуемый алгоритм позволяет повысить точность оценивания местоположения ВЦ по сравнению с адаптивным ФК и известным ММА при сопровождении траектории маневрирующей ВЦ. Результаты исследования показали, что затраты на вычисления первого упрощенного ФК уменьшаются по сравнению со вторым упрощенным и расширенным ФК, одновременно его точность оценивания как координат, так и скорости ВЦ повышается на (30−50)% по сравнению с «альфа — бета» и «альфа — бета — гамма» фильтрами. Поэтому использование первого упрощенного ФК для сопровождения траектории неманеврирующих ВЦ является более предпочтительным.
Цель и задачи работы.
Целью диссертационной работы являются исследование и анализ алгоритмов сопровождения траекторий ВЦ, разработка нового ММА и сравнение полученного ММА с известными адаптивными алгоритмами. В соответствии с поставленной целью в диссертационной работе решены следующие задачи:
• Исследование общей теории оценивания в пространстве состояния, и её применение к фильтрации траекторий движения ВЦ.
• Анализ «альфа — бета» и «альфа — бета — гамма» фильтров и метод выбора их коэффициентов усиления на участках манёвра и отсутствия манёвра.
• Исследование адаптивных ФК сопровождения траекторий маневрирующих ВЦ с обнаружителем момента времени начала манёвра.
• Оптимальное оценивание в пространстве состояния с расширенным вектором состояния, включающим кроме вектора параметров состояния, еще неизвестный параметр, определяющий все возможные варианты модели состояния.
• Исследование известных ММА и разработка нового ММА сопровождения маневрирующих ВЦ на основе описания траектории движения ВЦ одновременно несколькими моделями, являющимися состояниями односвязной цепи Маркова.
Методы исследования.
Теоретическое исследование и создание алгоритмов сопровождения траекторий ВЦ выполнены на основе теории фильтрации условных процессов Маркова в дискретное время. Проанализированы полученные алгоритмы на основе статистического моделирования. Научная новизна работы заключается в следующем Разработан ММА при описании траектории ВЦ одновременно несколькими моделями для односвязной цепи Маркова.
Достоверность полученных результатов работы подтверждается результатами статистического моделирования.
Практическая значимость результатов работы.
Разработан и исследован алгоритм сопровождения траектории маневрирующей ВЦ, улучшающий точность сопровождения на участках манёвра.
Апробация результатов работы и публикации.
Основные научные результаты работы опубликованы в статьях журналов «Радиотехника», «Электронный журнал Труды МАИ» и «Авиакосмическое приборостроение», и докладывались на 5-ой международной конференции «Цифровая обработка и ее применение» (Москва, 2003), на международной конференции и выставке «Авиация и космонавтика 2003» (МАИ 2003). Объем и структура работы.
Диссертационная работа состоит из введения, четырех глав, заключения и списка литературы. Работа содержит 106 страниц текста.
Список литературы
включает 93 наименований. В первой главе рассмотрены и проанализированы некоторые существующие методы сопровождения траекторий неманеврирующих и слабоманеврирующих ВЦ в задаче УВД. Во второй главе проведен анализ известных адаптивных алгоритмов сопровождения маневрирующих целей, которые основаны на использовании обнаружителей манёвра и коррекции либо параметров, либо структуры фильтра. В третьей главе проанализировано состояние ММА в АС УВД. В четвертой главе предложен общий подход к построению многомодельных алгоритмов для задачи УВД при описании возможных моделей движения ВЦ односвязной цепью Маркова.
§ 4.4. Выводы.
В этой главе был предложен общий подход построения многомодельных алгоритмов при описании возможных моделей движения ВЦ состояниями односвязной цепи Маркова и получены следующие результаты.
• на основе общей теории фильтрации условных процессов Маркова [10, 12, 13] был создан алгоритм, в котором фильтруемый вектор параметров включает не только параметры движения цели, а еще неизвестный параметр, определяющий возможные модели движения цели. В результате этого полученный алгоритм является субоптимальным, что обуславливается гауссовской аппроксимацией для апостериорной плотности вероятностей.
• применительно к сопровождению траектории маневрирующих ВЦ, полученный алгоритм промоделирован для случая М=2. Результаты показали, что на участках траектории манёвра исследуемый двухмерный алгоритм повышает точность оценивания места на (30 — 60)% по сравнению с известными алгоритмами. Однако, повышение качества фильтрации достигается увеличением затрат на вычисления.
ЗАКЛЮЧЕНИЕ
.
В диссертационной работе исследованы алгоритмы сопровождения траекторий ВЦ по данным обзорной РЛС. Полученные результаты позволяют оценить преимущества и недостатки каждого алгоритма сопровождения. В диссертации исследованы и разработаны алгоритмы, позволяющие избегать опасных сближений и повысить точность оценивания, как координат, так и скорости ВЦ. Известно, что вторичная обработка радиолокационной информации (ВОРИ) обычно выполняется с помощью ЦВМ, либо цифровой аппаратуры. В последние годы было бурное развитие компьютерной технологии, микропроцессоров, элементной базы цифровой техники, особенно СБИС, ПЛИС, и языков описания аппаратуры и системы, таких как УРЮЬ, АШЭЬ и т. д. Наметилась тенденция внедрения СБИС для создания открытых систем на основе международных стандартов, в том числе системы ВОРИ. Это позволяет исследовать более сложные алгоритмы сопровождения траекторий ВЦ в реальном масштабе времени. В представленной работе исследованы разные алгоритмы сопровождения неманеврирующих и маневрирующих ВЦ на основе статистического моделирования. В диссертации получены следующие результаты:
1. Исследованы «альфа — бета» и «альфа — бета — гамма» фильтры, предложен вариант выбора их коэффициентов усиления при сопровождении траектории ВЦ. «Альфа — бета» и «альфа — бета — гамма» фильтры позволяют уменьшить затраты на вычисления и упростить процедуру сопровождения траекторий ВЦ, однако они одновременно ухудшают качество сопровождения на (30 — 40)% в зависимости от дальности, скорости и числа наблюдения по сравнению с обычными фильтрами.
2. Исследована проблема нелинейной фильтрации, когда обзорная РЛС измеряет полярные координаты ВЦ, а фильтруемый вектор включает параметры движения в декартовой системе координат. Предложены упрощенный фильтр Калмана, преобразующий координаты измерения из полярной системы в декартову, и расширенный фильтр Кальмана, линейно аппроксимирующий уравнение измерения путем сокращения членов высоких порядков ряда Тейлора. Анализ показал, что второй упрощенный и расширенный фильтры Калмана дают одинаковый результат по точности оценивания, как положения, так и скорости, но по вычислительным затратам второй упрощенный фильтр Калмана экономичнее.
3. Предложены адаптивные алгоритмы на основе совместного обнаружения и оценивания манёвра ВЦ. Задача обнаружения манёвра относится к классу задач обнаружения полезных сигналов на фоне белых гауссовских шумов. В этом случае обнаруживаемым полезным сигналом является математическое ожидание обновляющего процесса, которое отличается от нуля при наличии манёвра. При решении задачи обнаружения манёвра использован метод отношения правдоподобия, а для оценивания его интенсивности будем считать ускорение неслучайным процессом, в результате для синтеза оценивателя необходимо воспользоваться критерием максимального правдоподобия. Для сопровождения маневрирующей ВЦ после обнаружения манёвра изменяются либо параметры, либо структуры фильтров.
4. Исследован и разработан адаптивный многомодельный алгоритм, в котором учитываются все возможные модели, соответствующие траектории движения ВЦ. Таким образом, кроме оценивания вектора параметров движения, необходимо оценивать апостериорные вероятности всех моделей. Текущая оценка координат ВЦ формируется как весовая сумма оценок относительно всех моделей по апостериорным вероятностям. Это позволяет алгоритму сопровождения среагировать на манёвр сразу после его начала. Для создания адаптивных многомодельных алгоритмов неизвестный параметр, определяющий одну из М возможных моделей движения ВЦ в каждой момент времени, описывается односвязной цепью Маркова. В результате этого полученный алгоритм создан из набора М2 параллельных фильтров Калмана. Результаты моделирования для случая М= 2 показали, что на участках траектории манёвра исследуемый двухмерный алгоритм повышает точность оценивания местоположения ВЦ на (30 — 60)% по сравнению с известными алгоритмами. Однако, повышение качества фильтрации достигается увеличением затрат на вычисления.
5. Разработанные программы эксперимента на ЦВМ позволяют оценить преимущества и недостатки алгоритмов, на основе которых определяется возможность внедрения их в конкретных условиях.
Список литературы
- Фарина А., Студер Ф. Цифровая обработка радиолокационной информации. Пер. с англ. -М.: Радио и связь, 1993, 319 с.
- Сейдж Э., Меле Дж. Теория оценивания и её применение в связи и управлении. Пер. с англ. -М.: Связь, 1976,496 с.
- Бакулев П. А., Степин В. М. Методы и устройства селекции движущихся целей. М.: Радио и связь, 1986, 288 с.
- Кузьмин С. 3. Цифровая радиолокация. Издательство КВ1Ц, Киев 2000, 426 с.
- Сосулин Ю.Г. Теоретические основы радиолокации и радионавигации. -М.: Радио и связь, 1992,303 с.
- Бакут П. А., Жулина Ю. В., Иванчук Н. А. Обнаружение движущихся объектов. М.: Советское радио, 1980, 287 с.
- Кузьмин С. 3. Цифровая обработка радиолокационной информации. М.: Сов. радио, 1967,399 с.
- Кузьмин С. 3. Основы теории цифровой обработки радиолокационной информации. М.: Сов. радио, 1974, 431 с.
- Кузьмин С. 3. Основы проектирования систем цифровой обработки радиолокационной информации. М.: Радио и связь, 1986, 352 с.
- Ю.Сосулин Ю. Г. Теория обнаружения и оценивания стохастических сигналов. М.: Сов. Радио, 1978,320 с.
- П.Ширман Я. Д., Манжос В. Н. Теория и техника обработки радиолокационной информации на фоне помех. М.: Радио и связь, 1981, 416 с.
- Тихонов В. И. Статистическая радиотехника. М.: Радио и связь, 1982, 624 с.
- З.Тихонов В. И., Харисов В. Н. Статистический анализ и синтез радиотехнических устройств и систем. М.: Радио и связь, 1991, 608 с.
- М.Бочкарев А. М., Юрьев А. Н., Долгов М. Н., Щербинин А. В. Цифровая обработка радиолокационной информации// Зарубежная радиоэлектроника. № 3, 1991, с. 3 22.
- Пузырев В. А., Гостюхина М. А. Алгоритмы оценивания параметров движения летательных аппаратов// Зарубежная радиоэлектроника, № 4, 1981, с. 3−25.
- Гриценко Н. С., Кириченко А. А., Коломейцева Т. А., Логинов В. П., Тихомирова И. Г. Оценивание параметров движения маневрирующих объектов// Зарубежная радиоэлектроника, № 4,1983, с. 3 30.
- Детков А. Н. Оптимизация алгоритмов цифровой фильтрации траекторной информации при сопровождении маневрирующей цели// Радиотехника, 1997, № 12, с. 29−33.
- Жуков М. Н., Лавров А. А. Повышение точности измерения параметров цели с использованием информации о маневре носителя РЛС// Радиотехника, 1995, № 11, с. 67 — 71.
- Булычев Ю. Г., Бурлай И. В. Квазиоптимальное оценивание параметров траекторий управляемых объектов// Радиотехника и электроника, 1996, Т. 41, № 3, с. 298−302.
- Бибика В. И., Утемов С. В. Фильтр сопровождения маневрирующих малозаметных целей// Радиотехника, 1994, № 3, с. 11−13.
- Меркулов В. И., Дрогапин В. В., Викулов О. В. Синтез радиолокационного угломера для сопровождения интенсивно маневрирующих целей// Радиотехника, 1995, № 11, с. 85 91.
- Меркулов В. И., Добыкин В. Д. Синтез алгоритма оптимальной идентификации измерений при автоматическом сопровождении воздушных объектов в режиме обзора// Радиотехника и электроника, 1996, Т. 41, № 8, с. 954−958.
- Меркулов В. И., Халимов Н. Р. Обнаружение маневров цели с коррекцией алгоритмов функционирования систем автосопровождения// Радиотехника, 1997, № 11, с. 15−20.
- Бар-Шалом Я., Бервер Г., Джонсон С. Фильтрация и стохастическое управление в динамических системах. Под ред. Леондеса К. Т.: Пер. с англ. М.: Мир. 1980, 407 с.
- Рао С. Р. Линейные статистические методы и их применения: Пер. с англ. -М.: Наука, 1968.
- Максимов М.В., Меркулов В. И. Радиоэлектронные следящие системы. Синтез методами теории оптимального управления. -М.: Радио и связь, 1990,255 с.
- Kameda Н., Matsuzaki Т., Kosuge Y. Target Tracking for Maneuvering targets Using Multiple Model Filter// IEEE Trans. Fundamentals, vol. E85-A, № 3, 2002, p. 573−581.
- Bar-Shalom Y., Birmiwal K. Variable Dimension Filter for Maneuvering Target Tracking// IEEE Trans, on AES 18, № 5, 1982, p. 621 — 629.
- Schooler С. C. Optimal a p Filters For Systems with Modeling Inaccuracies// IEEE Trans, on AES — 11, № 6, 1975, p. 1300- 1306.
- Kerim Demirbas. Maneuvering Target Tracking with Hypothesis Testing// IEEE Trans, on AES 23, № 6, 1987, p. 757 — 765.
- Michael Greene, John Stensby. Radar Target Pointing Error Reduction Using Extended Kalman Filtering// IEEE Trans, on AES 23, № 2, 1987, p. 273 -278.
- McAulay R. J., Denlinger E. A. Decision-Directed Adaptive Tracker// IEEE Trans, on AES 9, № 2, 1973, p. 229 — 236.
- Bar-Shalom Y., Fortmann Т. E. Tracking data association. Boston: Academic Press, 1988, 353 p.
- Kalata P. R. The Tracking index: a generalized parameter for a P and a — p -у target trackers// IEEE Trans, on AES — 20, № 2,1984, p. 174 — 182.
- Bhagavan В. K., Polge R. J. Performance of g-h Filter For Tracking Maneuvering Targets/ IEEE Trans, on AES-10, № 6, 1974, p. 864 866.
- Ackerson Guy A., Fu K. S. On State Estimation in Switching Environments// IEEE Trans, on AC-15, № 1, February 1970, p. 10 17.
- Bar-shalom Y., Chang K.C., Blom H. A. Tracking a Maneuvering Target Using Input Estimation Versus the Interacting Multiple Model Algorithm// IEEE Trans, on AES-25, № 2, March 1989, p. 296 300.
- Wen-Rong Wu, Peen-Pau Cheng, A Nolinear IMM Algorithm for Maneuvering Target Tracking// IEEE Trans, on AES-30, № 3, July 1994, p. 875 -885.
- Jiin-an Guu, Che-ho Wei. Maneuvering Target Tracking Using IMM Method at High Measurement Frequency// IEEE Trans, on AES-27, № 3, May 1991, p. 514−519.
- Blom H. A., Bar-shalom Y. The Interacting Multiple Model Algorithm for Systems with Markovian Switching Coefficients// IEEE Trans, on AC-33, № 8, August 1988, p. 780−783.
- Mazor E., Averbuch A., Bar-shalom Y., Dayan J. The Interacting Multiple Model Methods in Target Tracking: A Survey// IEEE Trans, on AES-34, № 1, 1998, p. 103−123.
- Benedict T. R., Bordner G.R. Synthesis of an optimal set of radar track-while-scan smoothing equations// IRE Trans, on AC-7, July 1962, p. 27 32.
- Chan Y. T., Hu A. G. C., Plant J. B. A Kalman Filter Based Tracking Scheme with Input Estimation// IEEE Trans, on AES 15, № 2, July 1979, p. 237 — 244.
- Chan Y. T., Plant J. B., Bottomley J. R. T. A Kalman Tracker With a Scheme with Input Estimator// IEEE Trans, on AES 18, № 2, 1982, p. 235 — 240.
- Bogler P. L. Tracking a Maneuvering Target Using Input Estimation// IEEE Trans, on AES 23, № 3, 1987, p. 298 — 310.
- Steven R. Rogers. Alpha Beta Filter With Correlated Measurement Noise// IEEE Trans, on AES — 23, № 4, 1987, p. 592 — 594.
- Baheti R. S. Efficient Approximation of Kalman Filter for Target Tracking// IEEE Trans, on AES 22, № 1,1986, p. 8 — 14.
- Miller K. S., Leskiw D. M. Nonlinear Estimation With Radar Observations// IEEE Trans, on AES 18, № 2, 1982, p. 192 — 200.
- Murat E. F., Atherton A. P. Maneuvering target tracking using Adaptive turn rate models in he IMM algorithm// Proceedings of the 35th Conference on Decision & Control. 1996, p. 3151 -3156.
- Alouani A. T., Xia P., Rice T. R., Blair W. D. On the Optimality of Two-Stage State Estimation In the Presence of Random Bias// IEEE Trans, on AC 38, № 8, 1993, p. 1279- 1282.
- Julier S., Uhlmann J., Durrant-Whyte H. F. A New Method for the Nonlinear Transformation of Means and Covariances in Filters and Estimators// IEEE Trans, on AC 45, № 3, 2000, p. 477 — 482.
- Farina A., Ristic B., Benvenuti D. Tracking a Ballistic Target: Comparison of Several Nonlinear Filters// IEEE Trans, on AES 38, № 3, 2002, p. 854 — 867.
- Xuezhi wang, Subhash Challa, Rob Evans. Gating Techniques for Maneuvering Target Tracking in Clutter// IEEE Trans, on AES 38, № 3, 2002, p. 1087 -1097.
- Doucet A., Ristic B. Recursive State Estimation for Multiple Switching Models with Unknown Transition Probabilities// IEEE Trans, on AES 38, № 3, 2002, p. 1098−1104.
- Willett B., Ruan Y., Streit R. PMHT: Problems and Some Solutions// IEEE Trans, on AES 38, № 3,2002, p. 738 — 754.
- Watson G. A., Blair W. D. Interacting Acceleration Compensation Algorithm For Tracking Maneuvering Targets// IEEE Trans, on AES -31, № 3, 1995, p. 1152- 1159.
- Watson G. A., Blair W. D. Interacting Multiple Bias Model Algorithm with Application To Tracking Maneuvering Targets// Proceedings of the 31st Conference on Decision and Control. December 1992, p. 3790 3795.
- Kameda H., Tsujimichi S., Kosuge Y. A Comparison of Multiple Model Filters For Maneuvering Target Tracking// SICE 2000, p. 55 60.
- Kameda H., Tsujimichi S., Kosuge Y. Target Tracking Under Dense Environments using Range Rate Measurements// SICE 1998, p. 927 — 932.
- Rong Li X., Bar-Shalom Y. Performance Prediction of the Interacting Multiple Model Algorithm// IEEE Trans, on AES 29, № 3, 1993, p. 755 — 771.
- Ito M., Tsujimichi S., Kosuge Y. Tracking a three-dimensional Moving Target with two-dimensional Angular Measurements from Multiple Passive Sensors// SICE 1999, p. 1117−1122.
- De Feo M., Graziano A., Miglioli R., Farina A. IMMJPDA versus MHT and Kalman Filter with NN correlation: performance comparison// IEE Proc. Radar, Sonar Navigation, Vol. 144, № 2, April 1997, p. 49 56.
- Lerro D., Bar-Shalom Y. Interacting Multiple Model Tracking with Target Amplitude Feature// IEEE Trans, on AES 29, № 2, 1993, p. 494 — 509.
- Jilkov V. P., Angelova D. S., Semerdjiev TZ. A. Design and Comparison of Mode-Set Adaptive IMM Algorithm for Maneuvering Target Tracking// IEEE Trans, on AES 35, № 1, 1999, p. 343 — 350.
- He Yan, Zhi-jiang G., Jing-ping J. Design of the Adaptive Interacting Multiple Model Algorithm// Proceedings of the American Control Conference, May 2002, p. 1538−1542.
- Buckley K., Vaddiraju A., Perry R. A New Pruning/Merging Algorithm For MHT Multitarget Tracking// IEEE International Radar Conference 2000, p. 71 -75.
- Bar-Shalom Y. Update with Out-of-Sequence Measurements in Tracking Exact Solution// IEEE Trans, on AES 38, № 3,2002, p. 769 — 778.
- Munir A., Atherton A. P. Maneuvering target tracking using different turn rate models in he IMM algornthm// Proceedings of the 34th Conference on Decision & Control, 1995, p. 2747 2751.
- Bar-Shalom (Ed.) Y. Multitarget-multisensor Tracking: Advanced applications. Vol. I. Norwood, MA: Artech House, 1990.
- Bar-Shalom (Ed.) Y. Multitarget-multisensor Tracking: Advanced applications. Vol. II. Norwood, MA: Artech House, 1992.
- Blackman S. S. Multiple Target Tracking with Radar Applications. Norwood, MA: Artech House, 1986.
- Campo L., Mookerjee P., Bar-Shalom Y. State Estimation for Systems with Sojourn-Time-Dependent Markov Model Switching// IEEE Trans, on AC-36, № 2, 1991, p. 238−243.
- Sengupta D., litis R. A. Neural Solution to the Multitarget Tracking Data Association Problem// IEEE Trans, on AES 25, № 1, 1989, p. 96 — 108.
- Меркулов В. И., Лепин В. Н. Авиационные системы радиоуправления. 1996, с. 391.
- Перов А. И. Адаптивные алгоритмы сопровождения маневрирующих целей//Радиотехника, № 7,2002, с. 73 81.
- Канащенков А. И., Меркулов В. И. Защита радиолокационных систем от помех. — М.: «Радиотехника», 2003.
- Qiang Gan, Chris J. Harris. Comparison of Two Measurement Fusion Methods for Kalman-Filter-Based Multisensor Data Fusion// IEEE Trans, on AES 37, № 1,2001, p. 273−280.
- Blackman S., Popoli R. Design and Analysis of Modern Tracking Systems. Artech House, 1999, 1230 p.
- Neal S. R. Discussion on «Parametric relations for the a-^-y filter predictor"// IEEE Trans, on AC-12, June 1967, p. 315 316.
- Репин В. Г., Тартаковский Г. П. Статистический синтез при априорной неопределенности и адаптация информационных систем. М.: «Советское радио», 1977, 432 с.
- Стратонович P. Л. Принципы адаптивного приёма. М.: Сов. радио, 1973, 143 с.
- Тихонов В. И., Теплинский И. С. Квазиоптимальное слежение за маневрирующими объектами// Радиотехника и электроника, 1989, Т.34, № 4, с. 792−797.
- Перов А.И. Статистическая теория радиотехнических систем. Учебное пособие. -М.: Радиотехника, 2003.
- Дарымов Ю. П., Крыжановский Г. А., Солодухин В. А., Кивько В. Г., Киров Б. А. Автоматизация процессов управления воздушным движением. М.: Транспорт, 1981,400 с.
- Анодина Т. Г., Кузнецов А. А., Маркович Е. Д. Автоматизация управления воздушным движением. М.: Транспорт, 1992, 280 с.
- Бакулев П.А., Сычев М. И., Нгуен Чонг Лыу. Сопровождение маневрирующей цели с помощью интерактивного многомодельного алгоритма//Электронный журнал, № 9, 2002 Труды МАИ.
- Бакулев П.А., Сычев М. И., Нгуен Чонг Лыу. Исследование алгоритма фильтрации траекторий маневрирующих радиолокационных целей// Цифровая обработка сигналов и ее применение, Доклад 5-й Международной Конференции. М.: 2003, Т. 1. — с. 201 — 203.
- Бакулев П.А., Сычев М. И., Нгуен Чонг Лыу. Многомодельный алгоритм сопровождения траектории маневрирующей цели по данным обзорной РЛС// Радиотехника, № 1, 2004.
- Нгуен Чонг Лыу. Синтез многомодельного алгоритма сопровождения траектории маневрирующей цели// Авиакосмическое приборостроение, № 1,2004.
- Нгуен Чонг Лыу. Исследование многомодельных алгоритмов фильтрации траекторий маневрирующих радиолокационных целей// Тезис доклада, международная конференция и выставка «Авиация и космонавтика 2003», МАИ 2003.