Двухкоординатный компенсационный микромеханический гироскоп
Помимо товаров широкого потребления существует ряд применений МЭМС приборов с требованиями иного рода. В первую очередь это военное применение МЭМС гироскопов и акселерометров, например, в навигационных приборах для ракет систем залпового огня, в артиллерийских снарядах, что способствует существенному повышению эффективности оружия. Известны примеры успешного применения в таких системах МЭМС… Читать ещё >
Содержание
- Список сокращений
Глава 1. Конструкция ДУС. Выбор схемы построения и основных конструктивных параметров. Конструкция и расчет узлов ДУС.
1.1. Конструктивная схема ДУС. Варианты маятников. Конструкция ДУ и ДМ ДУС.
1.2. Описание конструкции ДУС и его работы.
1.3. Уравнения движения маятника ДУС.
1.4. Выбор варианта организации обратной связи.
1.4.1. Перекрестная ОС.
1.4.2. Прямая ОС.
1.5. Выбор конструктивных параметров гироскопа.
1.5.1. Моменты инерции и масса подвижной части маятника.
1.5.2. Жесткости упругого подвеса.
1.5.3. Оценка демпфирования.
1.5.4. Расчет емкостного датчика угла.
1.5.5. Расчет магнитоэлектрических датчиков момента обратной связи и датчика момента по оси возбуждения.
1.5.5.1. Датчик момента обратной связи.
1.5.5.2. Датчик момента по оси возбуждения.
Глава 2. Квадратурная погрешность ДУС.
2.1. Причины возникновения квадратурной погрешности в ДУС.
2.2. Способы устранения квадратурной погрешности в ДУС.
Глава 3. Системы управления ДУС.
3.1. Система автовозбуждения колебаний.
3.2. Недостатки системы автовозбуждения и способы их устранения.
3.3. Система возбуждения колебаний с поддержанием амплитуды и дорезонансной настройкой.
3.4. Система возбуждения колебаний с поддержанием амплитуды и резонансной настройкой.
3.5. Система компенсационной ОС.
3.6. Использование микроконтроллера в ДУС.
Глава 4. Экспериментальные исследования ДУС.
4.1. Описание элементов ДУС.
4.1.1. Кремниевый маятник. Проблемы, возникающие при изготовлении.
4.1.2. Керамические корпуса. Проблемы, возникающие при изготовлении. Прочие детали конструкции.
4.1.3. Платы электроники.
4.2. Сборка и настройка ДУС.
4.2.1. Сборка ДУС. Оборудование и приспособления для сборки
4.2.2. Настройки прибора, оборудование и приспособления для настройки.
4.3. Экспериментальные исследования ДУС.
4.3.1. Методика испытаний ДУС.
4.3.2. Результаты испытаний.
Выводы.
Двухкоординатный компенсационный микромеханический гироскоп (реферат, курсовая, диплом, контрольная)
Стремительное развитие микроэлектроники за последние десятилетия позволило создавать сверхминиатюрные датчики различного типа и назначения, которые объединены одним общим названиеммикроэлектромеханические системы (МЭМС). Особое место среди этих устройств занимают микромеханические датчики ускорения и угловой скорости — акселерометры и гироскопы. Возможность размещения большого количества датчиков на одной кремниевой пластине (вафле) и одновременного их изготовления за один технологический цикл и обеспечение автоматической сборки приборов в корпусах (корпусирования) позволяет существенно снизить стоимость датчиков. Это и определяет их использование как товаров широкого потребления. Ниже в таблице 1 представлены некоторые из имеющихся на мировом рынке МЭМС гироскопов. Так же в таблице представлены МЭМС гироскопы, выпускаемые в России.
Таблица 1.
Данные по некоторым из МЭМС гироскопов, представленных на мировом и российском рынках.
Марка гироскопа Диапазон измеряемых скоростей Полоса пропускания Темп-ый дрейф нуля Плотность шумов Нелинейность Габариты Цена за шт. Объемы производства Назначение.
7с Гц 7с/°С % мм.
Analog Devices [1] (США).
ADXRS450 ±300 80 н/у 0.015 0.05 9x7x4 33 с/п ш/п.
ADXRS620 ±300 2500 и/у 0.05 0.1 7x7x3 27 с/п ш/п.
ADXRS649 ±20 000 2000 н/у 0.25 0.1 7x7x3 59 с/п ш/п.
ADXRS652 ±250 2000 н/у 0.25 0.1 7x7x3 20 с/п ш/п.
Таблица 1 — продолжение.
InvenSense [2] (США).
ISZ-505 ±500 140 ±0.25 0.25% ско 0.5 4x4x1 4 с/п ш/п iSZ-655 ±2000 140 ±0.4 0.67с СКО 0.5 4x4x1 4 с/п ш/п.
IXZ-2150 2-х осный ±2000 н/у ±0.1 0.17с СКО 0.2 4x4x1 6 с/п ш/п.
IXZ-2020 2-х осный ±250 Il/y ±0.2 0.0757с СКО ±0.1 3x3x1 н/у с/п ш/п.
MPU-3050 3-х осный ±2000 Il/y ±0.03 0.17с СКО 0.2 4x4x1 12 с/п ш/п.
ITG-3200 3-х осный ±2000 н/у ±0.3 0.387с СКО 0.2 4x4x1 10 с/п ш/п muRata [3] (Япония).
ENC-03M ±300 50 н/у н/у 5 7×12×3 4 с/п ш/п.
STI VI [4] (Европа).
LY330ALI-I ±300 140 0.02 0.014 ±1 3x5x1 3 с/п ш/п.
LY3200ALH ±2000 140 0.09 0.074 ±1 3x5x1 3 с/п ш/п.
LPY403AL 2-х осный ±30 140 0.02 0.01 ±1 4x5x1 6 с/п ш/п.
LPY450AL 2-х осный ±500 140 0.08 0.025 ±1 4x5x1 6 с/п ш/п.
LPY4150AL 2-х осный ±1500 140 0.25 0.075 ±1 4x5x1 5 с/п ш/п.
L3G3200D 3-х осный ±2000 н/у ±0.04 0.03 0.2 3x4x1 3 с/п ш/п.
A3G4250D 3-х осный ±245 н/у ±0.03 0.03 0.2 4x4x1 6 с/п ш/п.
Systron Donner [5] (США).
QRS14 ±500 50 ±0.05 0.05 0.05 60×25×25 200 с/п в/п.
QRS116 ±100 60 ±10″ 4 0.002 0.05 042×14 н/у с/п в/п.
SDG500 ±100 60 ±0.08 0.005 0.05 32×32×15 н/у с/п в/п.
Таблица 1 — окончание.
ЭООЗООО ±500 н/у ±10'5 0.01 А1Ш 0.05 78×83×25 н/у с/п в/п.
Ношоп ±90 18 ±0.075 0.025 0.05 58×25×25 700 с/п в/п.
С>1Ш8 2-х осный ±100 110 н/у 0.005 0.05 018×26 н/у с/п в/п.
Уес^о^ау [6, 7] (США).
УЫ-ЮО 3-х осный ±500 140 н/у н/у н/у 24×22×3 100 с/п ш/п.
Исп-сь до ?300 40 ±0.35.
Электроприбор [8] (Россия).
ММГ-2 ±300 40 н/у 0.05 1 50×18×50 н/у с/п ш/п.
Элпа [9] (Россия).
ДУС-1 ±600 30 0.5 0.02 н/у 30×30×50 н/у с/п ш/п.
ДУС-2 ±8000 30 0.5 0.02 н/у 30×30×50 н/у с/п ш/п.
МПГ-1 ±300 10 0.016 0.007 н/у 10×20×30 н/у с/п ш/п.
МПГ-2 ±60 и/у н/у н/у 0.2 13×12×8 н/у с/п ш/п.
НИИ ПМ [10] (Россия) ммвг ±20 и/у н/у У/уГЧ А1Ш н/у 035×15 н/у о/о.
РПКБ [11] (Россия) ммг ±100 н/у ±0.03 н/у 1 35×35×30 н/у.
— Беше [12] (Россия).
АШ'-ЮО ±150 40 н/у 0.15 °/л/ч А11У 0.1 018×20 н/у.
А18Т-120 ±300 н/у н/у 0.15 л/ч" А1Ш 0.1 13x6x2 н/у с/п ш/п.
Приведенные значения нелинейности в таблице указаны от полного диапазона. Используемые в таблице сокращения: и/у — не указано, с/п — в серийном производстве, ш/п — многофункциональный товар широкого потребления, в/п — военное применение, о/о — опытные образцы. УИ-ЮО в тблице является блоком чувствительных элементов (БЧЭ) в состав которого входят три ДУС: верхняя строка — заявленные характеристики в техпаспорте на БЧЭнижняя строка — характеристики, полученные в результате испытаний БЧЭ.
В таблице 1 представлен далеко не весь список компаний, выпускающих МЭМС гироскопы. Его можно дополнить такими компаниями, как Bosch, DTS, Inertial Science, Kionix, Melexis, MemSensc, O-Navy, SBG Systems, Sensonor, Shaanxi Spaceflight The Great Wall, Silicon Sensing. Bee МЭМС датчики угловой скорости (ДУС) относятся к категории вибрационных гироскопов, основные механические схемы которых представлены в [13]. На сегодняшний день существует довольно большое количество вариантов микромеханических гироскопов, представленых в работах [14 — 27] и ниже.
32А.
ЗЗА.
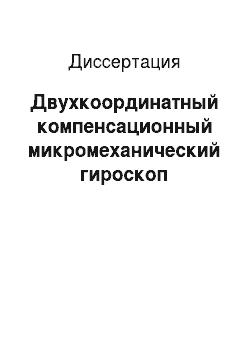
Рис. 1. К описанию конструкции гироскопа [28] (иллюстрация взята из патента [28]).
Известен патент США [28] микромеханического вибрациоиного гироскопа 11−11−11 типа (см. рис. 1), содержащий выполненный методами микромеханики крутильный маятник 12 в виде плоского кольца, прикрепленный посредством двух и более спиралевидных упругих перемычек 22 к центральному элементу крепления 15 прибора, установленного на основании. Спиралевидный подвес обеспечивает три угловые степени свободы кольца 12 относительно основания. В качестве ДМ системы возбуждения колебаний используются электростатические ДМ гребенчатого типа, статорные части 25 и 26 которых расположены на основании, а роторные 27 на кольце 12. Одновременно с функцией ДМ гребенчатые структуры 25, 26 и 27 выполняют функцию емкостного ДУ, для определения угла поворота маятника 12 вокруг оси возбуждения колебаний перпендикулярной плоскости маятника. Эта информация используется в системе ОС по поддержанию амплитуды колебаний вокруг оси возбуждения. Гироскоп имеет возможность измерять две составляющие проекции угловой скорости основания, лежащие в плоскости маятника. При наличии колебаний маятника вокруг оси возбуждения и наличии измеряемых угловых скоростей маятник начинает колебаться вокруг измерительных осей соответствующих обкладкам емкостных ДУ 30−33. Амплитуда колебаний маятника, пропорциональная измеряемым скоростям, измеряется посредством этих емкостных ДУ, подвижным электродом которого является тело маятника 12, а неподвижными — четыре пары электродов ЗО-ЗЗА и ЗО-ЗЗВ (на рисунке не видны), расположенные с обеих сторон маятника, по две пары на измерительную ось, включенных по дифференциальной схеме. В приборе может быть организована компенсационная ОС. В этом случае емкостные ДУ, но измерительным осям выступают одновременно в роли электростатических ДМ ОС.
1108−2 1105−4.
1102−4.
1201−4.
1105−2.
1108−1.
1103−2.
Л ^ 1103−1.
1105−1.
1102−1.
1201−1 «4109−1.
Рис. 2. К описанию конструкции гироскопа [29]: вид сверху (иллюстрация взята из патента [29]).
1105−4.
1201−4.
1106−2.
1201−2 1105−2.
1102−2.
1102−4.
Рис. 3. К описанию конструкции гироскопа [29]: вид А-А (иллюстрация взята из патента [29]).
Рис. 4. К описанию конструкции гироскопа [29]: один из вариантов упругих элементов с напылением (иллюстрация взята из патента [29]).
Известен патент США [29] микромеханического вибрационного гироскопа R-R-R типа с магнитоэлектрическими ДМ системы возбуждения японской компании Sony (см. рис. 2 и 3). Гироскоп содержит выполненный методами микромеханики крутильный маятник 1101, закрепленный на основании к четырем наружным 1105 и четырем внутренним 1106 якорям посредством четырех наружных 1102 и четырех внутренних 1103 упругих элементов, один из вариантов геометрии которых представлен на рис. 4. По поверхности каждой из четырех пар упругих перемычек 1102 и 1103 и поверхности маятника 1101 от наружных якорей 1105 к внутренним 1106 проходят четыре электропроводящие дорожки 1108 и 1109, изолированные от тела маятника 1101 изолирующем подслоем 1107. Две из четырех пар дорожек используются как роторная часть магнитоэлектрического ДМ системы возбуждения, другие две пары используются для снятия ЭДС, пропорциональной амплитуде угловой скорости маятника вокруг оси возбуждения Z. Вся конструкция находится в магнитном поле, создаваемым постоянным магнитом 1124, который является статорной частью магнитоэлектрического ДМ системы возбуждения и датчика скорости. В результате, при протекании тока по паре электропроводящих дорожек возникающий магнитоэлектрический момент вызывает колебания маятника.
1101 вокруг оси возбуждения Z па резонансной частоте. Гироскоп имеет возможность измерять две составляющие проекции угловой скорости основания, лежащие в плоскости маятника. При наличии измеряемых угловых скоростей маятник начинает колебаться вокруг измерительных осей X и У. Амплитуда колебаний маятника, пропорциональная измеряемым скоростям, измеряется посредством емкостных ДУ, подвижным электродом которого является тело маятника 1101, а неподвижными — две пары электродов 1201, по паре на измерительную ось, включенных по дифференциальной схеме. Для уменьшения демпфирования в теле маятника имеются сквозные отверстия 1104.
Известен патент США [30] микромеханического вибрационного гироскопа Я-Я-Я типа (см. рис. 5), содержащего крутильный маятник, в состав которого входят осесимметричный диск 302 с центральным элементом креплеиия 324 (якорем) и упругим подвесом 306, связывающим диск 302 с якорем 324. Упругий подвес 306 с плоскими балками обеспечивает диску возможность совершать колебания вокруг оси симметрии Ъ (ось возбуждения) и вокруг нормальных к ней осей X и У (выходные оси). Крутильный маятник 302 посредством якоря 324 укреплен в изолированном корпусе 304 таким образом, что между его торцом и поверхностью корпуса образован равномерный зазор. взята из.
Рис. 5. К описанию конструкции гироскопа [30] (иллюстрация патента [30]).
На поверхности изолированного корпуса 304, обращенной к диску 302, выполнены электроды емкостных ДУ 312, обеспечивающих измерение углов поворота диска вокруг выходных осей. Подвижным электродом ДУ служит диск 302, выполненный из электропроводящего материала (монокристаллического кремния). В конструкцию гироскопа входит емкостной ДМ 310 гребенчатого типа, возбуждающий крутильные колебания диска и емкостные компенсационные ДМ (роторной частью которого является диск 302, а статорной обкладки 312), включенные в цепи обратной связи гироскопа и обеспечивающие компенсацию моментов кориолисовых сил, действующих по выходным осям гироскопа при измерении им угловой скорости корпуса. Гироскоп содержит генератор сигнала возбуждения и систему регулировки крутильных колебаний маятника, обеспечивающие настройку колебаний маятника на его резонансную частоту и стабилизацию амплитуды крутильных колебаний маятника, а также усилители сигнала обратной связи, входы которых связаны с электродами емкостного датчика угла, а выходы — с компенсационными датчиками момента. Помимо этого в состав гироскопа входят системы компенсации квадратурных сигналов гироскопа с электростатическими ДМ 314. Данный гироскоп способен измерять две составляющие угловой скорости, по осям X и Y, лежащие в плоскости конструкции.
Последняя группа гироскопов R-R-R типа (с плоскими крутильными маятниками и упругими подвесами, обеспечивающими три степени свободы маятнику) представляется наиболее интересной, так как позволяет получить ДУС с двумя измерительными осями, имея в составе прибора всего один маятник. Именно эта группа двухкоординатных гироскопов выбрана в качестве объекта исследования.
Помимо товаров широкого потребления существует ряд применений МЭМС приборов с требованиями иного рода. В первую очередь это военное применение МЭМС гироскопов и акселерометров, например, в навигационных приборах для ракет систем залпового огня, в артиллерийских снарядах, что способствует существенному повышению эффективности оружия. Известны примеры успешного применения в таких системах МЭМС приборов [31]. Приборы систем управления этими объектами должны быть меньше по габаритам и существенно дешевле обычных электромеханических приборов, габариты которых составляют: 030.50 мм, Z, = 70.150 мм, а цены — до 10 000 USD. Приемлемыми являются габариты ~01О.2О мм, высота 10.20 мм, цены до 1000 USD при объеме производства от 1000 до 10 000 штук в год. В то же время оценка показывает, что для получения приемлемых результатов требуются достаточно высокие точностные характеристики приборов, существенно превышающие точностные характеристики имеющихся в продаже недорогих твердотельных МЭМС датчиков. При использовании имеющихся на рынке датчиков, получение необходимой точности систем управления может быть достигнуто только путем их комплексирования со спутниковой навигационной системой. Это снижает помехоустойчивость систем управления объектами и не всегда приемлемо. Существуют достаточно точные твердотельные МЭМС датчики, полученные путем отбора приборов с высокими точностными характеристиками из больших выпускаемых партий. Кроме того построенные на них инерциальные измерительные блоки обеспечиваются системами калибровки и оптимальной фильтрации выходных сигналов. Точные приборы существенно дороже имеющихся на рынке датчиков широкого потребления (цены до 2000 USD) и имеют ограничения на продажу в Россию для использования в оборонных целях.
Российские предприятия до сих пор не наладили выпуск МЭМС приборов с требуемыми для указанных выше применений точностными характеристиками. Причины этого кроются, как в недостаточном финансировании приборной отрасли в перестроечные и постперестроечпые годы, так и в недостатке внимания, уделяемого проблемам создания МЭМС технологий, в советское время. Возможны следующие пути выхода из создавшейся ситуации:
1. Совместная с западными предприятиями разработка МЭМС приборов, производство опытных образцов приборов на оборудовании и по технологии западных фирм и последующая покупка технологии с наладкой производства на российских предприятиях. Этот путь реализуется ОАО Концерн «ЦНИИ «Электроприбор» [32].
2. Создание собственных твердотельных МЭМС приборов и технологий [33]. Этот путь чрезвычайно трудозатратен, дорог, длителен и вероятно может быть успешен лишь в случае реализации проекта Сколково.
3. Создание гибридных МЭМС приборов, сочетающих методы МЭМС технологии с использованием электромеханических элементов, хорошо освоенных приборостроительными предприятиями. Указанные приборы являются более трудозатратными и дорогими по сравнению с твердотельными МЭМС приборами массового производства, имеют габариты в диапазоне 10. 20 мм, что хотя и больше габаритов твердотельных МЭМС датчиков, однако вполне приемлемо для рассматриваемых применений. В свою очередь гибридные приборы существенно дешевле и меньше классических навигационных электромеханических гироскопов и акселерометров и не требуют для своего изготовления высокого уровня технологического обеспечения, характерного для твердотельной МЭМС техники. В гибридных приборах может быть реализовано малое время на разработку и изготовление опытных образцов и их освоение производством на обычных приборостроительных предприятиях и существующей технологической базе. Интересно отметить, что по пути создания гибридных МЭМС приборов в настоящее время идет ряд иностранных фирм, например, компания ВАЕ, выпускающая гибридный МЭМС твердотельный волновой гироскоп [34]. В нем используется магнитная система, характерная для обычных электромеханических приборов, и вибратор (кольцо), изготовленный методами МЭМС технологии. Сборка прибора осуществляется автоматически. Причиной выбора такого иути является возможность получения более высоких точностных характеристик, чем в твердотельных МЭМС приборах.
Среди российских фирм, занимающихся МЭМС гироскопами, наибольших результатов добились фирма «Электроприбор», НИИ ПМ им. В. И. Кузнецова, РПКБ, фирма ¡—ЗепБе и «Гирооптика», проведено значительное количество исследований [35 — 47], однако до настоящего времени разработки не вышли из опытной стадии и серийный выпуск МЭМС приборов не реализован. Кроме того, известные 11−11 гироскопы, обладая малыми массой, габаритами и стоимостью, имеют ряд существенных недостатков, в первую очередь связанных с невысокими точностными характеристиками. Также для их изготовления требуется специальная подготовка производства, чрезвычайно дорогое оборудование, недоступное многим предприятиям отечественного приборостроения. Другим недостатком является невозможность регулирования параметров гироскопа на стадии производства, в связи с чем, большое количество приборов идет в брак.
В отличие от других разработчиков МГТУ им. Н. Э. Баумана уделяет большое внимание разработке технологически более простых, хотя и более габаритных и дорогих гибридных МЭМС приборов. В МГТУ накоплен большой опыт создания гибридных МЭМС акселерометров и гироскопов [48 — 72] - это ряд акселерометров, для навигационных и инклинометрических применений, роторные вибрационные гироскопы для системы управления быстро вращающихся снарядов (скорость вращения вокруг продольной оси 10.25 об/с).
Сравним твердотельный вариант прибора и гибридный вариант (вариант типа «сэндвич»). Возможности твердотельной МЭМС технологии позволяют получать габариты прибора 11−11−11 типа в плане ~2,5×2,5 мм [73]. В то же время выбор таких габаритов накладывает как конструктивные, так и технологические ограничения на схему прибора:
1. ограничения толщины маятника (обычно от 20 до 60 мкм). Необходимость использования при изготовлении таких маятников технологии плазменного травления не позволяет получать неискаженную форму поперечного сечения упругих перемычек подвеса маятника;
2. возможность использования в системе возбуждения колебаний маятника исключительно электростатических датчиков момента гребенчатого типа с присущим им малым уровнем развиваемого электростатического момента и необходимостью формирования малых зазоров между подвижными и неподвижными электродами 0,6−1 мкм;
3. малые площади тела маятника и электродов емкостного датчика угла (которые используются практически во всех известных конструкциях датчиков угловой скорости R-R типа) требуют для получения приемлемых величин емкостей (~10 пФ) малых торцевых зазоров между колеблющимся маятником и неподвижными электродами (~1 мкм). Столь же малые зазоры имеют место и при травлении жертвенного слоя под маятником;
4. в качестве компенсационных датчиков ДУС могут использоваться только емкостные ДМ, обладающие, как известно, нелинейностью управляющей характеристики и зависимостью коэффициента передачи датчика от перемещения подвижного электрода.
Малый электростатический момент в системе возбуждения требует для получения приемлемых амплитуд колебаний маятника вокруг оси Z высокой добротности колебательной системы (70 000−100 000), что при отмеченных зазорах прибора невозможно получить без глубокого вакуумирования его полости. Сверхмалые размеры этих приборов делают невозможным реализацию механической юстировки параметров упругого подвеса подвижной массы в процессе либо после изготовления приборов. Кроме всего прочего твердотельный вариант требует для своей реализации высочайшего уровня технологического и аппаратурного обеспечения и больших инвестиций на этапе подготовки производства и целесообразен только в случае предполагаемого массового выпуска продукции (до миллионов штук в год). Только в этом случае может быть обеспечена окупаемость затрат, произведенных на этапе разработки и подготовки производства.
Как уже отмечалось выше, существуют применения МЭМС приборов (особенно в оборонной технике), где приемлемыми являются габариты -010.20 мм, высота 10.20 мм и цены до 1000 USD при объеме производства от 1000 до 10 000 штук в год. При этом от приборов требуются повышенные точностные характеристики и возможность реализации их производства в условиях существующей приборостроительной отрасли России. К классу таких приборов относятся гибридные МЭМС датчики, изготовленные по варианту «сэндвич». В таких приборах чувствительный элемент (поступательный или вращательный вибратор плоской формы) изготавливается методами МЭМС технологии из кремниевой вафли и затем вручную или на станках автоматической сборки монтируется между двумя ответными пластинами, содержащими необходимые для функционирования приборов элементы: обкладки емкостных датчиков угла, постоянные магниты, контактные площадки с проводниками, обеспечивающими вывод сигналов от размещенных на кремниевом чувствительном элементе обмоток и подведение к нему необходимых для нормального функционирования прибора токов и напряжений. Рассмотрим некоторые преимущества гибридных микромеханических приборов по сравнению с твердотельными:
1. Возможность сочетания в приборах элементов, получаемых методом МЭМС технологии (кремниевый маятник) с элементами обычных электромеханических приборов, например магнитоэлектрическими датчиками сил и моментов.
2. Магнитоэлектрические ДМ не требуют малых рабочих зазоров и позволяют получать большие управляющие моменты, благодаря чему для нормальной работы приборов достаточно иметь добротность механических систем от 500 до 3000. Учитывая то обстоятельство, что в гибридных приборах электростатические емкостные датчики угла по выходным осям имеют значительные площади, приемлемые значения емкостей удается получать при зазорах между подвижным маятником и неподвижными электродами в 30−50 мкм. При таких зазорах требуемый уровень добротности удается обеспечить при наличии газового заполнения прибора (давление газа 1 атм.). При этом следует учитывать, что если для приборов разомкнутого типа, где выходная информация определяется колебаниями маятника по осям X и У, желательно иметь большую добротность механической колебательной системы вокруг осей X и У, то для приборов компенсационного типа резонансная настройка и большая добротность не требуются. Более того, наличие большого коэффициента демпфирования колебаний по выходным осям желательно с точки зрения обеспечения оптимальных динамических характеристик компенсационных контуров прибора. Поэтому большое газовое демпфирование для выходных осей и соответственно малые добротности механических колебательных систем по ним (порядка 0,9 при указанных зазорах 30−50 мкм) в меньшей степени будут сказываться на точностных параметрах компенсационных ДУС, чем ДУС разомкнутого типа.
3. Имеется возможность формирования маятника толщиной, равной толщине исходной заготовки (вафли) (-380 мкм). Большая длина упругих перемычек позволяет получать в гибридных МЭМС гироскопах большую, чем в твердотельных, амплитуду колебаний маятника по каналу Ъ. Большая толщина маятника вместе с большим его диаметром и большие углы возбуждаемых колебаний маятника вокруг оси Z увеличивают момент кориолисовых сил, вызывающих колебания вокруг осей X и У. Это способствует повышению точности прибора.
4. В гибридных МЭМС гироскопах допускается изготовление маятника из вафли выполнением сквозных отверстий по технологии анизотропного травления. Эта технология обеспечивает лучшую форму поперечного сечения балок по сравнению с плазменным травлением и допускает проведение корректирующего подтрава упругих элементов, позволяющего устранять влияние искажения перемычек в процессе изготовления маятников (см. главу 2). Это увеличивает выход годных приборов.
5. Использование магнитоэлектрического ДМ в качестве возбудителя колебаний по оси Z позволяет снижать величину остаточного сигнала ДУС путем регулировки формы магнитных полей в магнитной цепи.
Помимо указанных преимуществ, следует отметить также возможность изготовления ДУС с использованием уже отработанных технологий в сборочных цехах обычных приборостроительных предприятий.
На основании вышеизложенного анализа был осуществлен выбор в пользу гибридного варианта (варианта «сэндвич»).
Целью диссертации является разработка и исследование принципов построения гибридных двухкоординатпых компенсационных микромеханических датчиков угловых скоростей, исследование причин возникновения погрешностей в нем и способов их снижения. Для дос тижения указанной цели были поставлены и решены следующие задачи:
1. Развита теория работы микромеханических вибрационных гироскопов Я-Я-Я типа:
— исследованы прямой и перекрестный варианты построения системы компенсационной обратной связи в приборе;
— выявлены основные причины возникновения квадратурной погрешности гибридного гироскопа, разработаны и исследованы способы ее устранения.
2. Разработана схема построения гибридного гироскопа и отдельных его узлов: кремниевого маятникадатчиков угла (ДУ) — ДМ системы возбуждения колебанийДМ обратной связи (ОС).
3. Разработана методика определения рационального соотношения размеров ДМ ОС с целью получения максимального момента в минимальных габаритах.
4. Разработаны и исследованы характеристики различных конструкций упругих подвесов кремниевого маятника и определено рациональное соотношение собственных линейных и угловых частот по трем осям, позволяющее улучшить характеристики прибора.
5. Обосновано применение различных вариантов построения систем возбуждения колебаний маятника с поддержанием амплитуды угловой скорости.
6. Разработана технология изготовления маятникового узла гибридного гироскопа, а также технология его сборки и регулировки.
7. Созданы и экспериментально исследованы опытные образцы гибридных гироскопов.
Выводы.
1. Разработана конструкция двухкоординатного гибридного МЭМС гироскопа 11−11−11 типа с кремниевым маятниковым узлом, емкостными ДУ, магнитоэлектрическими ДМ системы возбуждения колебаний и магнитоэлектрическими ДМ ОС, с большими рабочими зазорами и без вакуумирования, позволяющая повысить точностные характеристики гироскопов, и позволяющая изготавливать их на существующей отечественной технологической базе.
2. Разработана конструкция кремниевого маятника, выполненного по обращенной схеме, с размещенными не его поверхности обмотками магнитоэлектрических ДМ ОС и системы возбуждения.
3. Разработаны варианты конструкции упругого подвеса маятника, позволяющие варьировать величины его жесткостей и тем самым получить максимальный отклик механической системы на частоте возбуждения и разнести собственные частоты угловых и линейных колебаний маятника.
4. Разработана конструкция магнитоэлектрического ДМ ОС, которая, имея роторную часть в виде плоской обмотки на поверхности маятника, позволяет получать моменты от сил Ампера, лежащие в плоскости маятника.
5. Разработана методика определения рационального соотношения размеров ДМ ОС с целью получения максимального момента в минимальных габаритах.
6. Исследованы варианты построения компенсационной ОС в гибридном двухкоординатном гироскопе, что позволило обеспечить более высокие точностные и динамические характеристики приборов.
7. Выявлены причины возникновения квадратурной погрешности в гибридном гироскопе и разработаны методы ее компенсации, применяемые в процессе изготовления маятников и сборки приборов, позволяющие физически снизить величину паразитных колебаний и тем самым повысить точностные характеристики гироскопов.
8. Разработаны варианты построения системы возбуждения колебаний с поддержанием амплитуды, позволяющие с большей точностью поддерживать амплитуду собственного кинетического момента и тем самым повысить точностные характеристики гироскопов.
9. Разработана технология изготовления маятникового узла, сборки и регулировки гибридных гироскопов.
10. Созданы и экспериментально исследованы опытные образцы гибридных гироскопов. Результаты испытаний подтвердили основные положения теоретической части работы.
11. Получено положительное решение на выдачу патента РФ на изобретение: микромеханический вибрационный гироскоп.
Список литературы
- URL: http://www.analog.coiri/en/mems-sensors/mems-gyroscopes/products/ index. html (дата обращения: 02.07.2012).
- URL: http://www.invensense.com/mems/gyro/catalog.html (дата обращения: 02.07.2012).
- URL: http://search.murata.co.jp/Ceramy/CatalogAction.do?sHinnm=? &sNHinnm=ENC-03M&sNhinkey=ENC-03M&sLang=en&sParam=enc (дата обращения: 02.07.2012).
- URL: http://www.st.com/internet/analog/subclass/1288.jsp (дата обращения: 02.07.2012).
- URL: http://www.systron.com/inertial-sensors/overview (дата обращения: 02.07.2012).
- URL: http://www.vectornav.com/Downloads/Support/UM001.pdf (дата обращения: 02.05.2011).
- URL: http://www.elektropribor.spb.ru/ (дата обращения: 02.07.2012).
- URL: http://www.elpapiezo.ru/device.shtml (дата обращения: 02.07.2012).
- URL: http://www.tsenki.com/productiontechnologies/hiroscopic/sensors/ micromechanicalvibratorygyroscope/ (дата обращения: 02.07.2012).
- URL: http://www^kb.m/index.phppageid=14.html (дата обращения: 02.07.2012).
- URL: http://www.isense.ru/products.htm (дата обращения: 05.01.2009).
- IEEE Std. 1431™-2004. Standard Specification Format Guide and Test Procedure for Coriolis Vibratory Gyros / D. Anderson et al. IEEE Aerospace and Electronic Systems Society, 2004. ISBN 0−7381−4006−6 SS95224.
- Micromachined gyros: Pat. 6 505 511 USA, Int. Cl. G01P 9/04 / J.A. Geen et al.- Analog Devices, Inc. Appl. No. 09/645 199, 2003.
- Coriolis oscillating gyroscopic instrument: Pat. 6 481 283 USA, Int. CI. GO IP 15/14 / D. Cardarelli- Milli Sensor Systems & Actuators, Inc. Appl. No. 09/542 605, 2002.
- Multi-axes gyroscope: Pat. 5 359 893 USA, Int. Cl. G01P 9/04 / W.C. Dunn- Motorola, Inc. Appl. No. 810 062, 1994.
- Angular velocity sensor: Pat. 6 308 567 USA, Int. CI. GO IP 9/04 / H. Higuchi, N. Ohya, T. Fukada- Denso Corporation, Japan. Appl. No. 09/458 954, 2001.
- Микромеханический вибрационный гироскоп (его варианты): Пат. 2 085 848 Cl (РФ), МПК7 G01С 19/56 / A.C. Неаполитанский и др.- ТОО НПК «Вектор». № 95 121 439/28, 1997.
- Vibration monolithic gyroscope: Pat. 5 329 815 USA, Int. Cl. GO IP 9/04 / W.C. Dunn, R.M. Roop- Motorola, Inc. Appl. No. 810 064, 1994.
- MEMS sensor with single central anchor and motion-limiting connection geometry: Pat. 6 513 380 USA, Int. CI. GO 1С 19/00 / J.W. Reeds, III, Y.W. Hsu, P.C. Dao- Microsensors, Inc. Appl. No. 09/884 880, 2003.
- Electrically decoupled silicon gyroscope: Pat. 6 626 039 USA, Int. CI. GO 1С 19/02 / S.G. Adams, J. Grovers, D. Cardarelli et al.- MilliSensor Systems and Actuators, Inc. Appl. No. 09/660 740, 2003.
- Gimballed vibrating wheel gyroscope: Pat. 5 535 902 USA, Int. Cl. H01L 21/00 / P. Greiff- The Charles Stark Draper Laboratory, Inc. Appl. No. 445 878, 1996.
- Gimballed vibrating wheel gyroscope having strain relief features: Pat. 5 650 568 USA, Int. Cl. G01P 9/04 / P. Greiff, B.M. Antkowiak- The Charles Stark Draper Laboratory, Inc. Appl. No. 440 536, 1997.
- Comb-drive micromechanical tuning fork gyroscope with piezoelectric readout: Pat. 5 767 405 USA, Int. Cl. G01P 9/04 / J.J. Bernstein, M.S. Weinberg- The Charles Stark Draper Laboratory, Inc. Appl. No. 584 377, 1998.
- Silicon gyro with integrated driving and sensing structures: Pat. 6 374 672 USA, Int. CI. GO IP 9/04 / H.C. Abbink, Y.A. Choi- Litton Systems, Inc. Appl. No. 09/627 549, 2002.
- Multi-element micro gyro: Pat. 5 955 668 USA, Int. CI. G01P 9/04 / Y.W. Hsu, J.W. Reeds, III, C.H. Saunders- Irvine Sensors Corporation. Appl. No. 09/166 458, 1999.
- Navigation grade micromachined rotation sensor system: Pat. 5 987 986 USA, Int. CI. GO IP 9/04 / S.F. Wyse, R.E. Stewart, S.H. Fersht- Litton Systems, Inc. Appl. No. 08/903 499, 1999.
- Rotational vibration gyroscope: Pat. 5 511 419 USA, Int. CI. G01P 9/04 / W.C. Dunn- Motorola. Appl. No. 283 342, 1996.
- Angular velocity detector, method of.: Pat. 7 469 603 USA, Int. CI. G01L 3/02 / M. Nagata, H. Nishitake, K. Fukomoto et al.- Sony Corporation, Japan. Appl. No. 10/595 430,2008.
- Micromachined vibratory rate gyroscope: Pat. 6 067 858 USA, Int. CI. G01C 19/00 / W. A. Clark, T. Juneau, R. T. Howe- The Regents of the University of California. Appl. No. 08/865 726, 2000.
- Micro-electromechanical instrument and system development at Draper laboratory / N. Barbour et al/. // 3rd Saint Petersburg international conference on integrated navigation system. Part I. 1996. P. 3−10.
- Результаты испытаний микромеханического гироскопа R-R типа / В. Г. Пешехонов и др. // XVII Санкт-Петербургская международная конференция по интегрированным навигационным системам: Сборник материалов. 2010. С. 8.
- He G., Najafi K. A single-crystal silicon vibrating ring gyroscope // 15th IEEE International Conference on Micro Electro Mechanical Systems, Las Vegas, NV, 2002.
- Унтилов A.A. Исследование и разработка упругого подвеса чувствительного элемента микромеханического гироскопа: Автореф. дис.. канд. техн. наук. (05.11.03). Санкт-Петербург. 2005. 20 с.
- Ковалев А.С. Управление перичными и вторичными колебаниями микромеханического гироскопа: Автореф. дис.. канд. техн. наук. (05.11.03). Санкт-Петербург. 2008. 18 с.
- Шадрин Ю.В. Исследование динамических характеристик чувствительного элемента микромеханического гироскопа: Автореф. дис.. канд. техн. наук. (05.11.03). Санкт-Петербург. 2005. 18 с.
- Беляев Я.В. Методы снижения порога чувствительности микромеханического гироскопа: Автореф. дис.. канд. техн. наук. (05.13.01). Санкт-Петербург. 2010. 22 с.
- Лестев М.А. Нелинейные задачи динамики вибрационных микромеханических гироскопов: Автореф. дис.. канд. техн. наук. (01.02.01). Санкт-Петербург. 2007. 16 с.
- Лочехин А.В. Интегрированная система с инерциальным модулем на электростатическом гироскопе и микромеханических датчиках: Автореф. дис.. канд. техн. наук. (05.11.03). Санкт-Петербург. 2010. 17 с.
- Иванов П.А. Разработка и исследование методов испытаний микромеханических инерциальных модулей: Автореф. дис.. канд. техн. наук. (05.11.16). Санкт-Петербург. 2011. 18 с.
- Овчинникова Н.А. Исследование динамики и информационных характеристик двумерного микромеханического гироскопа роторного типа: Автореф. дис.. канд. техн. наук. (05.13.01). Санкт-Петербург. 2011. 18 с.
- Ву Тхе Чунг Зыап Влияние вибрации основания и упругих свойств резонатора на динамику микромеханических гироскопов: Автореф. дис.. канд. техн. наук. (01.02.06). Москва. 2010. 19 с.
- Астахов C.B. Нелинейные эффекты в динамике волнового твердотельного и микромеханического гироскопов в условиях медленно меняющихся параметров: Автореф. дис.. канд. техн. наук. (01.02.06). Москва. 2012. 20 с.
- Шерова Е.В. Разработка методов и методик проектирования многоосевых микромеханических сенсоров угловых скоростей и линейных ускорений: Автореф. дис.. канд. техн. наук. (05.27.01). Таганрог. 2010. 23 с.
- Тимошенков A.C. Исследование и разработка методов расширения рабочего диапазона и улучшения характеристик микромеханических датчиков угловой скорости: Автореф. дис.. канд. техн. наук. (05.27.01). Москва. 2012. 28 с.
- Горячев A.B. Магнитные и деформационные процессы в полупроводниковых структурах с магнитными слоями для микромеханических устройств: Автореф. дис.. канд. техн. наук. (01.04.10). Москва. 2009. 24 с.
- Вибрационные датчики угловой скорости / С. Ф. Коновалов и др. // X Санкт-Петербургская международная конференция по интегрированным навигационным системам: Сборник материалов. 2003. С. 261−271.
- Фатеев В.В., Подчезерцев В. П., Лютый М. Н. Вибрационный датчик угловой скорсти // Вестник МГТУ им. Н. Э. Баумана. Приборостроение. 1999. № 1. С. 59−68.
- Фатеев В.В., Кулешов A.B., Носов H.A. Поведение роторного вибрационного гироскопа для вращающегося носителя при наличии угловых колебаний // Вестник МГТУ им. Н. Э. Баумана. Приборостроение. 2002. № 3. С. 81−93.
- Носов Н.А., Кулешов А. В. Стержневой осцилляторный гироскоп. Моделирование установившегося движения // Вестник МГТУ им. Н. Э. Баумана. Приборостроение. 2002. № 3. С. 94−101.
- Носов Н.А., Фатеев В. В. Балочный вибрационный гироскоп // Третья Всероссийская научно-техническая конференция «Приборы и приборные системы»: Сборник материалов. Тула: ТГУ. 2001. С. 43−46.
- Servo accelerometer: Pat. 6 073 490 USA, Int. CI. GO IP 15/00 / S.F. Konovalov, G.M. Novosyolov, A.V. Polynkov et al.- S.F. Konovalov. Appl. No. 08/765 576, 1994.
- Compensation pendulous accelerometer: Pat. 6 422 076 USA, Int. CI. G01P 15/08 / V.M. Prokofiev, S.F. Konovalov, J.B. Seo et al.- Agency For Defense Development, Taejon (KR) — S.F. Konovalov, Moscow (RU). Appl. No. 09/598 386, 2002.
- Коновалов С.Ф., Коновченко A.A., Межирицкий E.JI. Компенсационный Si-flex акселерометр для измерения больших ускорений // Гироскопия и навигация. 2006. № 2. С. 44−51.
- Коновалов С.Ф., Seo J.B. Причины неравномерного распределения магнитной индукции в зазорах компенсационных датчиков акселерометров типа Q-flex // Гироскопия и навигация. 2009. № 2. С. 7279.
- Епишкин П.В., Коновалов С. Ф. Определение модели компенсационного акселерометра // I Санкт-Петербургская международная конференция по гироскопической технике. 1994. С. 149−165.
- Компенсационный маятниковый акселерометр: Пат. 2 155 964 С1 РФ, МКИ7 G01P15/13 / В. М. Прокофьев, С. Ф. Коновалов, Д. Б. Сео и др.- С. Ф. Коновалов. № 99 113 694/28, 1999.
- Compensation pendulous accelerometer: Pat. 336 151 Korea, Int. CI. G01P 15/08 / V.M. Prokofiev, S.F. Konovalov, J.B. Seo et al.- S.F. Konovalov. 2002.
- Опыт разработки малошумящего акселерометра / С. Ф. Коновалов и др. // VII Санкт-Петербургская международная конференция по интегрированным навигационным системам. 2000. С. 72−79.
- Опыт разработки малошумящего акселерометра / С. Ф. Коновалов и др. // Гироскопия и навигация. 2000. № 3(30). С. 68−77.
- Майоров Д.В. Аппаратурное и методическое обеспечение испытаний роторного вибрационного гироскопа для вращающегося носителя: Автореф. дис.. канд. техн. наук. (05.11.03). Москва. 2007. 16 с.
- Ли К. С. Разработка маятникового компенсационного акселерометра с кремниевым упругим подвесом: Автореф. дис.. канд. техн. наук. (05.11.03). Москва. 2002. 16 с.
- Сео Д. Б. Оптимизация параметров и моделирование рабочих режимов в компенсационных акселерометрах типа Q-flex и Si-flex: Автореф. дис.. канд. техн. наук. (05.11.03). Москва. 2012. 16 с.
- Шевцова Е.В. Исследование газового демпфирования в микромеханических приборах: Автореф. дис.. канд. техн. наук. (05.11.03). Москва. 2005. 16 с.
- Коновалов С.Ф., Лапин А. А., Юрасов Ю. В. Удароустойчивый подвес акселерометра // II Санкт-Петербургская международная конференция по гироскопической технике и навигации. 1995. С. 133−139.
- Опыт разработки навигационных приборов на базе монокристалла кремния / С. Ф. Коновалов и др. // Микросистемная техника. 2001. № 4. С. 17−25.
- Способ изготовления упругих элементов из монокристаллического кремния: А. С. 1 708 103 СССР, МКИ5 H01L 21/00 / Т. Н. Лаптева, И. И. Медведева, С. Ф. Коновалов, A.A. Трунов. № 4 696 326/25, 1989.
- Пономарев Ю.А., Кулешов A.B., Джепаров Н. Э. Макет микромеханического осцилляторного вибрационного гироскопа R-R типа // Труды ФГУП «НПЦ АП». 2009. № 2 (8). С. 52−58.
- The development of micro-gyroscope technology. Topical review / K. Liu et al. // Journal of micro mechanics and microengineering. 2009. № 11.
- Положительное решение по заявке на изобретение: Микромеханический вибрационный гироскоп: № 2 010 120 200/28(28 737) РФ / С. Ф. Коновалов и др. заявл. 21.05.2010.
- Микромеханический компенсационный акселерометр с магниоэлектрическими датчиками момента: Доклад / С. Ф. Коновалов и др. // XIX Санкт-Петербургская международная конференция по интегрированным навигационным системам: Сборник материалов. 2012. С. 78−84.
- Micromechanical compensation accelerometer with magnetoelectric torquers: Report / S.F. Konovalov et al. // 19th St. Petersburg International conference on Integrated Navigation Systems: Proceedings. 2012. P. 82−87.
- Сопротивление материалов: Учеб. пособие- 2-е изд., испр./ Н. А. Костенко и др. Под. ред. Н. А. Костенко. М.: Высш. шк. 2004. 430 е.: ил.
- Tatar Е. Quadrature error compensation and.: A thesis. master of science. Ankara: METU. 2010. 150 c.
- Niu S., Gao S. Analysis of Nonlinearities in force-to-voltage conversion in vibratory microgyroscope // International Conference on Measuring Technology and Mechatronics Automation (ICMTMA). 2010. P. 551−554.
- Saukoslci M., Aaltonen L., Halonen K.A.I. Zero-rate output and quadrature compensation in vibratory MEMS gyroscopes // Sensors Journal, IEEE. 2007. № 12. P. 1639−1651.
- Method of cancelling quadrature error in an angular rate sensor: Pat. 6 370 937 USA, Int. CI. G01P 9/04 / Y.W. Hsu- Microsensors, Inc. Appl. No. 09/812 147, 2002.
- Bias and quadrature reduction in class II coriolis vibratory gyros: Pat. 7 565 839 USA, Int. CI. GO IP 9/04 / R.E. Stewart, S.F. Wyse- Northrop Grumman Guidance and Electronics Company, Inc. Appl. No. 11/499 957, 2009.
- Двухкоординатный микромеханический ДУС с магнитоэлектрическими датчиками обратной связи по каналам возбуждения и измерения / С. Ф. Коновалов и др. // Гироскопия и навигация. 2010. № 3(70). С. 61−71.
- Design Concept and Preliminary Experimental Demonstration of 4-DOF MEMS Gyroscopes: Technical Report / Microsystems Laboratory. C. Acar, A.M. Shkel. 2002. p. 65.
- Беляева Т. А. Методы компенсации квадратурной помехи в микромеханическом гироскопе RR-типа: Дис.. канд. техн. наук. (05.13.01). СПб. 2009.
- Single-chip surface micromachined integrated gyroscope with 507h Allan deviation / J.A. Geen et al. // Solid-State Circuits, IEEE Journal of. 2002. № 12. P. 1860−1866.
- Micromachined gyros: Pat. 6 122 961 USA, Int. CI. G01P 9/04 / J.A. Geen et al.- Analog Devices, Inc. Appl. No. 08/921 672, 2000.
- Micromachined sensor with quadrature suppression: Pat. 7 032 451 USA, Int. CI. GO IP 9/04 / J.A. Geen- Analog Devices, Inc. Appl. No. 11/65 878, 2006.
- Clark W.A., Howe R.T., Horowitz R. Surface micromachined Z-axis vibratory rate gyroscope // Tech. Digest. Solid-State Sensor and Actuator Workshop. Hilton Head Island. 1996. P. 283−287.
- Quadrature reduction in MEMS gyro devices using quad steering voltages: Pat. 7 213 458 USA, Int. CI. G01P 9/04 / M.W. Weber, R.B. Smith- Honeywell International, Inc. Appl. No. 10/907 131, 2007.
- Yeh B.Y., Liang Y.C. Modelling and compensation of quadrature error for silicon MEMS microgyroscope. // IEEE Power Electronics and Drive Systems: Proceedings. 2001. vol. 2. P. 871−876.
- Micromachined Z-axis vibratory rate gyroscope: Pat. 5 992 233 USA, Int. CI. G01P 15/08 / W.A. Clark- The Regents of the University of California. Appl. No. 08/658 924, 1999.
- Dual-mass vibratory rate gyroscope with suppressed translational acceleration response and quadrature-error correction capability: Pat. 6 230 563 USA, Int. CI. G01P 9/04 / W.A. Clark et al.- Integrated Micro Instruments, Inc. Appl. No. 09/321 972, 2001.
- Method and apparatus for electronic cancellation of quadrature error: Pat. 7 290 435 USA, Int. CI. G01P 21/00 / J. Seeger, A. Rastegar, M.T. Tormey- Invensense Inc. Appl. No. 11/347 978, 2007.
- Sharma A., Zaman M.F., Ayazi F. A sub 0.2°/hr bias drift micromechanical gyroscope with automatic CMOS mode-matching // Solid-State Circuits, IEEE Journal. 2009. № 5. P. 1593−1608.
- A new silicon tuning fork gyroscope for aerospace applications / B. Chaumet et al. // Symposium Gyro Technology. 2009. P. 1.1−1.13.
- Яворский Б.М., Детлаф А. А. Справочник по физике- 4-е изд., испр. М.: Наука. Физматлит. 1996. 624 с. ISBN 5−02−15 158−0.
- Хоровиц П., Хилл У. Искусство схемотехники: Пер. с англ. Изд. 7-е. М.: Мир, БИНОМ. 2011. 704 с, ил.
- URL: http://www.oaopiezo.com/ (дата обращения 05.07.2012).
- Бесекерский В.А., Попов Е. П. Теория систем автоматического управления. СПб.: Профессия. 2003. 747 с.
- Большой энциклопедический словарь- 2-е изд., перераб. и доп. М.: Большая Российская энциклопедия. 1998. 1456 с.:ил.
- Буль Б. К. Основы теории и расчета магнитных цепей: Учебн. пособие / Б. К. Буль. М.: Энергия. 1964. 464 с.
- Терешков В.М. Методика полунатурных испытаний корректируемых бесплатформенных инерциальных навигационных систем: Автореф. дис.. канд. техн. наук. (05.11.03). Москва. 2011. 16 с.
- Кветкин Г. А. Инструментальные погрешности измерительного блока на базе триады лазерных гироскопов при динамических возмущениях: Автореф. дис.. канд. техн. наук. (05.11.03). Москва. 2011. 16 с.
- Добронравов В.В., Никитин H.H. Курс теоретической механики: Учебник для машиностроит. спец. вузов- 4-е изд., перераб. и доп. М.: Высш. школа, 1983. 575 е., ил.
- Добронравов В.В. Основы аналитической механики. Учеб. пособие для вузов. М., «Высш. школа». 1976.
- Казамаров A.A., Палатник A.M., Роднянский JI.O. Динамика двумерных систем автоматического регулирования. 1967. 308 с.
- Коновалов С. Ф. Теория виброустойчивости акселерометров. М.: Машиностроение. 1991. 270 с.
- Ланранж Ж. Аналитическая механика / пер. с фр. B.C. Гохмана, под ред. и с прим. Л.Г. Лойцянского- 2-е изд. М.: Гос. изд-во техн. -теор. литры. 1950. Т. 1,2.
- Лурье А.И. Аналитическая механика. М.: Государственное издательство физ. -мат. лит. 1961. 824 с.
- Неаполитанский A.C., Хромов Б. В. Микромеханические вибрационные гироскопы. М.: «Когито-Центр». 2002. 122 с.
- Постоянные магниты: Справочник / А. Б. Альтман и др.- Под ред. Ю.М. Пятина- 2-е изд., перераб. и доп. М.: Энергия, 1980. 488 с.
- Распопов В. Я. Микромеханические приборы. Учебное пособие. Тул. Гос. университет. Тула. 2002 г. 392 с.
- Свойства элементов- Справ, изд. / Под ред. Дрица М. Е. М.: Металлургия. 1985. 672 с.
- Справочник по математике / Бронштейн И. Н., Семендяев К. А.- 11-е изд., стереотип. М.: Наука, 1967. 608 с.
- Двухкоординатный компенсационный микромеханический гироскоп R-R типа: Тезисы докл. / С. Ф. Коновалов и др. // Актуальные проблемы российской космонавтики: Труды XXXIV Академических чтений по космонавтике. 2010. С. 598.
- Физические величины: Справочник/ А. П. Бабичев и др.- Под. ред. И. С. Григорьева, Е. 3. Мейлихова. М.- Энергоатомиздат. 1991. 1232 с.
- Пономарев Ю.А., Коновалов С. Ф. Двухкоординатный микромеханический осцилляторный вибрационный гироскоп R-R типа: Тезисы докл. // Гироскопия и навигация. 2009. № 2(65). С. 95.