Методика автоматизированного контроля качества управления движением летательного аппарата на предпосадочном маневрировании
Поскольку экипаж является как бы «конечным фильтром безопасности» и допущенные ошибки «ловить» уже некому, ему чрезвычайно важно распознать и прервать опасную цепь событий, которая может привести к АП. Но всегда ли у лётчика есть собственные возможности для правильной идентификации опасной ситуации, остаётся ли при этом время и психофизиологические ресурсы для коррекции траектории, с целью… Читать ещё >
Содержание
- Перечень условных обозначений
- Анализ состояния вопроса и постановка задач исследований
- 1. 1. Анализ аварийности в государственной авиации России
- 1. 2. Особенности функционирования полиэрготехнической. авиационной системы на заключительном этапе полёта
- 1. 3. Анализ существующих методов, средств и методик для контроля качества посадки
- 1−3.1. Методы, средства и методики, используемые для оценки качества управления летательным аппаратом на заключительном этапе полёта
- 1. 3. 2. Возможные подходы к выбору критериев автоматизированного контроля качества посадки
- 1. 4. Постановка задач исследований
- 2. Обоснование критериев оценки качества посадки летательного аппарата и выбор фазового пространства «коридора безопасности»
- 2. 1. Выбор метода для анализа влияния вариаций параметров полёта на точность посадки
- 2. 2. Методика исследования информативности параметров полёта о качестве посадки
- 2. 2. 1. Подготовка исходных статистических данных
- 2. 2. 2. Разработка структурной модели взаимосвязей параметров полёта
- 2. 2. 3. Математическая формализация структурной модели
- 2. 2. 4. Оценка достоверности полученных результатов
- 2. 3. Определение критериев оценки качества посадки
- 2. 4. Выбор рационального фазового пространства для контроля безопасности посадки манёвренного летательного аппарата
- Определение допустимой области отклонений фазовых координат манёвренного самолёта при посадке и уходе на второй круг
- 3. 1. Математическая модель движения самолета на заключительном этапе полёта
- 3. 1. 1. Основные допущения
- 3. 1. 2. Математическая формализация продольного и бокового движения
- 3. 2. Определение границ «коридора безопасности» летательного аппарата при посадке
- 3. 2. 1. Методика расчёта границ области допустимых отклонений параметров полёта на предпосадочном маневрировании
- 3. 2. 2. Расчёт «контрольных окон» для продольного движения
- 3. 2. 3. Расчёт «контрольных окон» для бокового движения
- 3. 3. Исследование оптимальных режимов ухода маневренного самолета на второй круг
- 3. 1. Математическая модель движения самолета на заключительном этапе полёта
- Методика автоматизированного контроля качества управления движением летательного аппарата на предпосадочном маневрировании
- 4. 1. Формирование обобщённого критерия оценки качества посадки
- 4. 1. 1. Синтез выражения обобщённого критерия
- 4. 1. 2. Определение весовых коэффициентов оценок частных критериев в обобщённом
- 4. 1. 3. Вычисление весовых коэффициентов оценок бокового и продольного движения
- 4. 1. 4. Количественная оценка сложности этапов посадки
- 4. 2. Определение эталонных законов изменения параметров полёта и их допусков для контроля качества управления
- 4. 3. Методика автоматизированного контроля качества посадки
- 4. 4. Применение методики для обоснования требований к средствам контроля качества управления движением
ПЕРЕЧЕНЬ УСЛОВНЫХ ОБОЗНАЧЕНИЙ. АН — авиационное происшествие- АТ — авиационная техника- БзП — безопасность полётов- БУР — бортовое устройство регистрации- ВКУ — видеоконтрольное устройство — ВПП — взлётно-посадочная полоса- ВТИ — внешнетраекторные измерения- ВУЗ ВВС — военно-учебные заведения ВВС- ГА — гражданская авиация- МУ — метеоусловия- ГРП — группа руководства полётами- КБП — курс боевой подготовки- ИКО — индикатор кругового обзора- ИП — информационное поле- КС — корабельный самолёт- ЛтС — лётный состав- ЛА — летательный аппарат- МО -министерство обороны- НИР — научно-исследовательская работа- ОДО — область допустимых отклонений- ОДП — оперативно-диспетчерский персонал-
ПАП — предпосылка к авиационному происшествию-
ПМУ — простые метеоусловия-
ПВО — противовоздушная оборона-
ПРЛК — посадочный радиолокационный комплекс-
ПРП — помощник руководителя полётов-
РВП — руководитель визуальной посадки-
РЗП -руководитель зоны посадки-
РБЗ — руководитель ближней зоны-
РСП — радиолокационная станция посадки-
РТК — расчётная точка касания —
РМВ — реальный масштаб времени-
РП — руководитель полётов-
СКО — среднеквадратическое отклонение-
СКП — стартовый командный пункт-
СОК — средства объективного контроля-
СУ — силовая установка-
ТА — телевизионная установка-
ТПР — точка принятия решения-
ЦБП И ПЛС — центр боевой подготовки и переучивания ЛтС ЦТ — центр тяжести —
ЦВМ — цифровая вычислительная машина- УВК — уход на второй круг-
- 4. 1. Формирование обобщённого критерия оценки качества посадки
Методика автоматизированного контроля качества управления движением летательного аппарата на предпосадочном маневрировании (реферат, курсовая, диплом, контрольная)
Современный этап развития авиации характерен стремлением к повышению эффективности Л А, расширению их боевых возможностей при решении поставленных задач в любых погодных и климатических условиях за счёт интенсивного внедрения новейших достижений науки и техники. Данное обстоятельство способствует расширению диапазона изменения эксплуатационных характеристик ЛА, повышению динамичности процессов управления, что неизбежно приводит к увеличению сложности эксплуатации авиационной техники и, как следствие, вызывает существенное увеличение информационной нагрузки на операторов, управляющих ЛА. В указанных условиях БзП становится одним из важнейших показателей, определяющих боевую эффективность авиационных комплексов [1,2].
Очевидность тезиса о том, что снижение аварийности достигается повышением надёжности каждого из слагаемых авиационной системы «экипаж — самолёт — ГРП — среда» [3,4,5] в авиации не вызывает сомнений. Однако на сегодняшний день не всё в этой системе гармонирует. Более того, сложился определённый перекос. Так, в авиационные подразделения поступают самолёты пятого поколения, оснащённые новейшей электроникой, воплотившие последние достижения научно-практической мысли и технологии, постоянно дорабатываемые промышленностью. Улучшен объективный контроль за работоспособностью АТ. Что касается человека — дело сложнее. Он почти не изменился, не изменилась и система его подготовки к полётам, контроля готовности, наземных средств управления.
Отмеченные обстоятельства способствуют совершению ошибок операторами рассматриваемой полиэрготехнической системы (ПЭрТС), многие из которых чреваты самыми серьёзными последствиями, что и подтверждается статистикой АП и ПАП.
Поскольку экипаж является как бы «конечным фильтром безопасности» и допущенные ошибки «ловить» уже некому, ему чрезвычайно важно распознать и прервать опасную цепь событий, которая может привести к АП. Но всегда ли у лётчика есть собственные возможности для правильной идентификации опасной ситуации, остаётся ли при этом время и психофизиологические ресурсы для коррекции траектории, с целью предотвращения аварийной ситуации? Критичность этапа посадки, к примеру, отчасти даёт отрицательный ответ [7]. Поэтому, именно на заключительном этапе полёта и отводится особая роль специалистам ГРП, контролирующим качество посадки в РМВ и призванным оперативно выявлять отклонения от номинальной траектории и добиваться их парирования. Однако существующие методы, средства и методики оценки качества посадки ЛА в РМВ не обеспечивают необходимой оперативности и объективности контроля в силу отсутствия автоматизации, недостаточной информативности, слабой методической проработки обоснования необходимых критериев, нормативов и алгоритмов [8], чем, отчасти, и объясняется устойчиво высокий уровень аварийности на заключительном этапе полёта [9].
В связи с вышеизложенным, задача по разработке научно обоснованных критериев, нормативов, алгоритмов, методик и средств автоматизированного контроля качества посадки является весьма актуальной.
Цель настоящей диссертационной работы и заключается в разработкеметодики автоматизированного контроля качества управления движением ЛА на предпосадочном маневрировании, позволяющей повысить информативность внешнетраекторного контроля при заходе на аэродром в РМВ в интересах обеспечения безопасности посадки.
Диссертация состоит из введения, 4-х разделов и заключения.
Список использованных источников
содержит 135 наименований. Всего в работе 167 страниц, из которых 18 иллюстраций.
Результаты исследования информативности параметров полёта о качестве управления ЛА показали, что вариации рассматриваемых параметров вносят различный вклад в изменение определяющих переменных, зависящий существенно и от этапа посадки [11, 12]. Отмеченное обстоятельство подчёркивает необходимость определения веса каждого параметра в рассматриваемом движении по этапам посадки.
Наибольшее распространение для определения весовых коэффициентов получили методы экспертных оценок [46, 47]. Однако, не смотря на широкое применение, они имеют некоторые недостатки, обуславливающие осторожность в использовании для решения поставленной задачи. К основным из них, прежде всего, следует отнести следующие. Во-первых, оценки, даваемые опытными экспертами, носят субъективный характер, что априори вносит погрешность в определение весовых коэффициентов. Во-вторых, весовые коэффициенты рассчитываются для определённого промежутка времени, хотя внутри него могут меняться в довольно широком диапазоне, что в конечном итоге существенно снижает достоверность получаемых результатов.
В связи с вышеизложенным и п. 2.1 задача определения весовых коэффициентов частных критериев по этапам посадки решалась с использованием статистического метода измерения связей [81], в частности метода причинного анализа [85].
Согласно апробированной методике (п. 2.2) линейная модель зависимости частных критериев от определяющего параметра в рассматриваемом движении представляется в виде структурной модели причинных отношений. В качестве определяющего параметра для продольного движения используется продольная точность касания ЛА ВПП I АЬ| (п. 2.3), а для боковогосоответственно боковое отклонение 1дг| от оси ВПП.
Графическое изображение причинных отношений между переменными V, Н, Уу и |дь| представлено на рис. 4.1, а между переменными ~ г, г, ъ и |Д2|-на рис. 4.2. В общем виде модель взаимосвязей для четырёх параметров полёта формализуется в виде следующей системы структурных уравнений: 2.
1,3 = Г1СГ, +Г2СТ1Д;
3*2,3 ~ Г2&-2 +Г1СТ1Д;
2 2 СГ1,4 = Г3СТ1 +Г1Г5О1 +и<5], 2 +№<7]^;
СГ3,4 = Г5СТ32 +Г1Г3СТ12 +Г2Т4а22 +Г, Г4С12 +Г2Г3СТ1−2;
32,4 = Г2г5ст22 +Г4СТ22 +Г3аи2 +Г]Г5а1д;
4.7) оторая после алгебраических преобразований сводится к линейной системе уравнении:
1,3-Г] а] +Г20″ и;
2.
2,3 — Г1С1Д + Г2С2 2 а1г4 = Гз<�Т1 +Г4СТ1Д +Г5О13- а2−4 = Г3СТ1Д +Г4СТ22 +Г5а2,з;
4.8) аз-4 = ГзС1з + г4а2, з+Г5СУ3.
Решение системы (4.8) относительно структурных коэффициентов.
П,., г 5 позволяет определить коэффициенты полного влияния экзогенных.
Рис. 4.1. Структурная модель взаимосвязей параметров полёта в продольном движении.
Рис. 4.2. Структурная модель взаимосвязей параметров полёта в боковом движении. переменных на эндогенные, а также путевые коэффициенты полного влияния.
Рц а, /а, (4.9) квадраты которых представляют коэффициенты детерминации. Приведённые к единому виду (2.13) квадраты путевых коэффициентов полного влияния исследуемых переменныхпричин и составляют количественную характеристику информативности о качестве посадки [85].
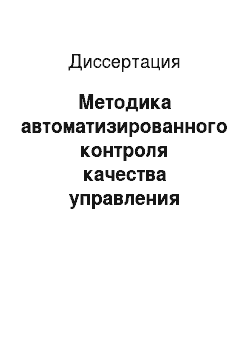
Результаты расчётов, проведённых на ЦВТ для трёх переменныхпричин V, Н, Уу в продольном движении и х, г, гв боковом представлены на рис. 4.3 и 4.4 в функции удаления от ВПП.
Анализ графических материалов показывает, что при подходе ЛА к «воротам принятия решения на выполнение посадки» (1^=500 м) происходит эскалация влияния вариации Уу на продольную точность касания, что может быть интерпретировано как результат более точного выдерживания высоты полёта. Однако, в дальнейшем доминанта вклада вариации Н в изменение продольной «ошибки» резко усиливается, особенно при подходе к срезу ВПП. В боковом движении (рис. 4.4) наибольшим «весом» вклада в боковую точность касания обладают вариации бокового уклонения ЛА от номинальной траектории и её производная, причём «вес» последней почти в три раза меньше.
Рис. 4.3. Количественная оценка влияния вариаций Z, Ъ, Z на IЫ, I в функции удаления.
4.1.3. Вычисления весовых коэффициентов оценок бокового и продольного движения.
В соответствии с п. 4.1.1 существует необходимость определения масштабных коэффициентов общих оценок бокового и продольного движений, то есть задача «взвешивания» двух «факторов», формирующих генеральную совокупность общих оценок по этапам посадки.
Метод максимального правдоподобия [120] является единственным методом, который даёт эффективные количественные оценки факторных нагрузок. Однако, из-за обременительности требуемых вычислений целесообразно использовать более простые аппроксимадионные методы. Наиболее популярным из них является центроидный метод (иногда его называют методом простого суммирования), хорошо описанный многими авторами (Burt, 1940; Thurstone, 1947; Thomson, 1951; Jowett, 1958.). Этот метод заслуживает особого внимания как более устойчивый к колебаниям распределения, причём оценки факторных нагрузок, которые он даёт, существенно близки к оценкам максимального правдоподобия. Кроме того, его легко понять, иллюстрируя на геометрической модели [121].
Рассмотрим геометрическую модель центроидного метода применительно к поставленной задаче «взвешивания» оценок бокового и продольного движений по этапам посадки.
В общем случае статистические переменные Хх,.Хр отождествляются с векторами, выходящими из начала координат р-мерного пространства, или.
32 — (СчСОвф!)2 гсг1су2 — <71ст2с05ф]с08ф2.
То1ст2 — а]СТ2С08ф1С08ф2 а22(а2со8ф2)2 сг^шф!
— а^агзтф^тфг.
— О^О^тф^тфг а225Ш2ф2.
4.15) так как г=соз (ф! + ф2)= созф^ОБфгБтф^тфг.
4.16).
Поскольку а^тф] = а2зшф2, то суммы как по строкам, так и по столбцам этой матрицы равны нулю, то есть генеральный фактор определяет 100% полной дисперсии рассматриваемой системы. Выражая со8ф1 исояфг в (4.15) через а], а2 и г, получим простой метод вычисления нагрузок переменных на фактор прямо из ковариационной матрицы А.
Например,.
Таким образом, в случае одного фактора достаточно рассчитать корреляцию между переменными, чтобы нагрузки однозначно определились.
Исходной информацией для решения задачи будут матрицы оценок [(3*1] в продольном и [Ой] в боковом движении соответственно, вычисленных в соответствии с выражениями (4.1) и (4.5).
1ц =СГ1С08ф1 =СТ12 + Г СГ1СУ2 / V (У2 +СТ22 +2Ш1<12.
4.17).
Рис 4.5. Геометрическая интерпретация центроидного метода.
Зк1 N.
— 2500 -2000 — 1500 — 1000 Ьк, м.
Рис. 4.6. Изменение весовых коэффициентов оценок бокового и продольного движения по этапам посадки.
Рис. 4.7. Количесвенная характеристика относительной сложности этапов посадки.
Результаты расчетов на ЦВМ предложенным методом показали, что для маневренного ЛА на больших удалениях «вес» оценок бокового движения на 15−20% больше чем продольного, однако по мере приближения ЛА к В ГШ в ПМУ уменьшается почти в 3,5 раза (рис. 4.6) [19].
4.1.4. Количественная оценка сложности этапов посадки.
Анализ возможных подходов к выбору критериев оценки качества посадки (п. 1.3.2) и синтез выражения обобщённого критерия показывает, что существует серьёзная проблема определения весовых коэффициентов этапов посадки ук. Универсального решения эта задача не имеет, поскольку возникающие в ходе её решения вопросы носят не столько вычислительный, сколько концептуальный характер определения степени сложности каждого этапа. Часто такие количественные значения «веса» получают с помощью экспертных оценок. Недостатки метода экспертных оценок хорошо известны (п. 4.1.2). Помимо того это и сложность его организации, трудность в подборе соответствующих экспертов, возможность получения больших ошибок в силу субъективности и т. д.
В настоящей работе предлагается энтропийный подход, позволяющий получить количественную оценку сложности этапов посадки ук на базе имеющийся статистики лётных испытаний.
Данный метод основан на анализе среднеквадратичных отклонений нормированных общих оценок качества пилотирования по этапам посадки (4.2). Фактически СКО сток даёт оценку разброса данных относительно среднего значения. Для нормированных оценок значения стек будут находиться в пределах:
О < сток ^ек тах.
4.18).
Рассмотрим как можно интерпретировать крайние значения 0 и стек тах. Равенство сток О означает, что все оценки на данном этапе посадки по совокупности реализаций равны между собой.
При сток тах разброс оценок относительно среднего максимален, а это означает, что в указанный момент оценка качества управления одним летательным аппаратом максимальная, а другимминимальная. Следовательно, на этот этап посадки следует обратить особое внимание, так как сравниваются однотипные ЛА, условия посадки которых одинаковы, но качество управления резко отличается. Значит и «вес» этого этапа ук при формировании обобщённого критерия оценки качества посадки должен быть максимальным. Обобщая сказанное, можно утверждать, что чем больше ctqk, тем больше должно быть и ук. Проще всего значение коэффициента ук брать в виде [124]:
Ук = ае&bdquo- (4.19).
Для удобства использования путём масштабирования можно сделать так, чтобы диапазон его изменения был в пределах [0- 1]. Это достигается следующим образом:
К=1.
Предложенный метод использовался для определения весовых коэффициентов этапов посадки с дискретностью по удалению в 70 м. Результаты расчётов показывают (рис. 4.7), что относительная сложность пилотирования практически одинакова до удаления 1400 м, далее по мере подхода к «воротам принятия решения на выполнение посадки» наблюдается плавная эскалация в 1,5−2 раза, после чегонезначительное уменьшение на 5−10% [21]. При подходе к срезу ВГТП происходит увеличение весового коэффициента вплоть до касания. Полученные результаты полностью согласуются и существенно дополняют информацию, полученную ранее методом экспертных оценок [79].
4.2. Определение эталонных законов изменения параметров полёта и их допусков для контроля качества управления.
Определение эталонных законов изменения параметров, выбранных в качестве частных критериев, а также допусков их отклонений на соответствующие оценки представляет собой одну из труднейших задач в разработке методики автоматизированной оценки качества управления ЛА. п.
4.20).
В настоящее время для решения этой задачи могут использоваться два подхода. Первый из них основан на том, что эталонные законы изменения параметров определяются путём математического моделирования движения самолёта на ЦВМ. В результате моделирования получаются оптимальные траектории движения [77, 78, 125, 126]. Используя результаты расчётов (п. 3.2.2 и 3.2.3), в качестве эталонных можно принять точки исследуемого фазового пространства, равноудалённые от границ «контрольных окон». Нормативы оценок по трёх бальной шкале можно получить посредством равномерного нормирования ОДО [32−35]. Однако, даже квазиоптимальное управление J1A на посадке присуще только лётному составу высшей квалификации. Поэтому данный подход возможно использовать только для испытательных полётов. При этом для нормирования «коридоров безопасности» целесообразно привлекать подходы теории квалиметрии [127], находящейся в данный момент на этапе осмысления и теоретических посылок.
Второй подход, получивший наиболее практическое применение для оценки качества управления [68, 73, 74, 79, 128], основан на том, что эталонные законы изменения параметров, а также допуска их отклонений, определяются при статической обработке информации реальных полётов, зафиксированной СОК [129,130].
Преимуществом данного подхода является доступность и простота решения поставленной задачи.
В связи с изложенным наиболее целесообразно использовать для определения эталонных законов изменения параметров полёта и допусков их отклонений на соответствующие оценки второй подход.
В соответствии с этим подходом в качестве эталонных законов изменения параметров Н, V, Уу, Н, г, ъ, ъ предлагается использовать законы изменения их математических ожиданий, а в качестве допусков на оценки «отлично», «хорошо», «удовлетворительно» и неудовлетворительно" - кратные значения СКО. Здесь реализуется четырёх бальная система оценок выдерживания параметров полёта, что не расходится с требованиями документов [65] по формированию оценок. При выходе хотя бы одного из рассматриваемых параметров за границы «коридора безопасности», что адекватно невозможности безаварийной посадки, должна формироваться команда УВК [34, 35].
В настоящей работе определение эталонных законов изменения параметров Н, Уу, Н, г, т., ъ и допусков их отклонений на соответствующие оценки полётной информации 105 посадок, выполненных ЛА типа Су-27 в ПМУ.
Наличие сформированных эталонных законов изменения параметров, входящих в качестве частных критериев в обобщённый критерий, допусков их отклонений на соответствующие оценки, а также известных весовых коэффициентов создаёт возможности для формирования методики автоматизированной оценки качества пилотирования.
Разработка собственно методики при наличии эталонных законов изменения оцениваемых параметров и допусков их отклонений на соответствующие оценки (п. 4.2), а также при известных весовых коэффициентах (п. 4.1.2, 4.1.3, 4.2.4) сводится к формированию процедуры использования обобщённого критерия (4.3). В соответствии с предложенным алгоритмом оценки точности выдерживания внешне траекторных параметров (4.5) необходимо последовательно сравнить ЛХЧ, (п. 4.1.1) с допусками 0К1,, 2Т) щ, ЗЦф на каждом этапе посадки в соответствующем движении, что позволит перейти к бальной оценке выдерживания параметров .
Взвешивание" оценок: на рассматриваемых этапах как в продольном, так и боковом движениях с последующим суммированием:
4.3. Методика автоматизированного контроля качества посадки.
4.21) ш.
4.22) обеспечит формирование количественных оценок за продольное СЫ и боковое 0к2 движения на к-ом этапе.
Суммарная оценка за к-ый этап посадки выставляется с учётом масштабирования С^:
Оч У= ОД* (4−23) в соответствии с критерием (4.2): I к С>ч? (4.24) 1.
Общая оценка за качество управления ЛА при посадке формируется с учётом сложности этапов посадки путём «взвешивания» оценок по этапам: 0*У = 0"7″ (4.25) с последующим суммированием: п.
0 = (4.26).
К=1.
Рассмотренная процедура использования обобщённого критерия (4.3) представляет собой описание алгоритма контроля качества управления ЛА при посадке, блок-схема которого приведена на рис. 4.8.
Предложенный алгоритм не только обеспечивает количественную оценку степени соответствия вектора динамического состояния ЛА его эталонному значению в РМВ, но и позволяет автоматизирование выдать команду по У В К с учётом возможностей СУ и динамических характеристик ЛА (п. 3.3) [11,18, 22, 23].
Рис. 4.8. Блок-схема алгоритма автоматизированного контроля качества управления движением Л, А при посадке.
В соответствии с вышеизложенным методика автоматизированного контроля качества управления ЛА при посадке реализуется поэтапно. На предварительном этапе определяются граничные условия применения предлагаемой методики, включающие в себя определение типа самолёта, способа посадки и метеоусловий. Для заданных условий осуществляется формирование эталонных законов изменения выбранных для контроля параметров, допусков их отклонений на соответствующие оценки и рассчитываются необходимые весовые коэффициенты с заданной дискретностью. Полученная информация вводится в ЦВМ.
Непосредственно в ходе работы осуществляется автоматизированный контроль качества управления ЛА по информации СОК о динамическом состоянии ЛА в РМВ. Результаты контроля индицируются в РМВ в соответствии с алгоритмом (рис. 4.8) на экране видеомонитора и по окончании посадки выдаются в виде бланка оперативного анализа. При этом на бланк выводится:
• общая оценка за посадку;
• общая оценка за качество управления ЛА по этапам и движениям с любой наперёд заданной дискретностью;
• информация в виде текстуального сообщения об имеющихся отклонениях внешнетраекторных параметров полёта от заданных значений с указанием конкретного физического значения параметра и момента выхода его за пределы допуска.
Разработанная методика позволяет повысить объективность и оперативность контроля и оценки качества управления. Повышение объективности обуславливается проведением более полного и детального контроля за счёт привлечения к оценке расширенного перечня наиболее информативных траекторных параметров с любой наперёд заданной дискретностью.
Оперативность обеспечивается выполнением контроля в РМВ, что позволяет формировать своевременные и адекватные команды по коррекции посадочной траектории, либо УВК.
Использование предлагаемой методики гарантирует исключение субъективного подхода к оценке, поскольку контроль осуществляется с использованием научно обоснованных критериев и алгоритмов, реализованных на ЦВМ.
Таким образом, автоматизированная оценка обеспечивает более полный, оперативный и объективный контроль за деятельностью операторов авиационной ПЭрТС на наиболее ответственном этапе полётапосадке, что призвано способствовать повышению уровня БзП.
Представленный на рис. 4.8 алгоритм автоматизированного контроля качества управления ЛА программно реализован на ЦВТ. Работа предлагаемой методики была проверена при контроле управления JIA в 35 реализациях посадки в ручном режиме в ПМУ.
Информация об эталонных задачах изменения оценивающих параметров, допусках их отклонений и весовых коэффициентах после предварительных расчётов была введена в ПЗУ ЦВМ. Ввод виртуальных массивов исходных данных по результатам дешифрирования полётной информации с бортового накопителя типа Гамма производился с дискретностью 70 м по удалению, что позволило выделить 35 этапов посадки (с удаления 2500 м), для удобства табличного вывода результатов счёта и иллюстрации универсальности применения методики.
Проверка работы методики показала возможность её практической реализации на наземных ЦВМ, так как при этом требуются сравнительно небольшие объёмы памяти — до 1 Мбайта в зависимости от количества оцениваемых этапов (при ёмкости жёстких дисков 40−150 Мбайт [131]) и обеспечивается необходимое быстродействие 50−150 тысяч оп/с (500−800 тыс. оп/с является обычным даже для ЦВМ конца 80-х годов).
Кроме того декомпозиция оценок в РМВ с трансформацией их в практические рекомендации даёт уникальные возможности ГРП и ЛтС по коррекции посадочной траектории ЛА в интересах безопасного завершения полёта. В качестве примера приведены таблицы 4.1, 4.2 и 4.3, где отображены развёрнутые массивы оценок за выдерживание частных.
ЗАКЛЮЧЕНИЕ
.
В результате проведенных в работе исследований:
1. Выявлено что существующие методы, средства и методики оценки качества управления движением ЛА на посадке не обеспечивают в полном объёме оперативного и объективного контроля качества посадки. В целях устранения отмеченных недостатков необходима разработка методического аппарата позволяющего оценить динамическое состояние ЛА на базе ЦВМ с использованием научно обоснованных критериев, нормативов и алгоритмов в РМВ.
2. Разработаны частные методики для определения информативности параметров полёта о качестве посадки и границ «коридора безопасности» ЛА на предпосадочном маневрировании. С помощью указанных методик установлено, что:
— в качестве критериев оценки качества управления целесообразно выбрать точность выдерживания высоты, скорости, вертикальной скорости на этапе захода на посадку и высоты, ее первой и второй производных на этапе собственно посадки в продольном движении, и, соответственно, точность выдерживания боковой координаты, ее первой и второй производных — в боковом движениикоридор безопасности" предпосадочного маневрирования определяется допустимыми вариациями высоты, вертикальной скорости, бокового отклонения от оси ВПП и её производной, суммарная доминанта влияния которых на точность и безопасность посадки составляет 79−85% от совокупного влияния учтённых и неучтённых факторов;
— для приземления в расчётной точке касания «контрольное окно» в продольном движении на входе в «ворота принятия решения на выполнение посадки» для самолёта типа Су-27, составляет ±-7м в максимальных отклонениях от глиссады, ±3,5М/с — от номинальной вертикальной скорости, и, соответственно, в боковом движении — + 14 м в отклонении от оси ВПП, ± 4м/с — от номинальной боковой скорости;
— игнорирование изменений эксплуатационных факторов приводит к ошибкам в оценке минимально-возможной высоты ухода маневренного ЛА на второй круг до 300 — 350% ,.
3. С использованием наиболее информативных параметров синтезирован обобщённый критерий, позволяющий оценивать качество управления движением ЛА при посадке. Критерий имеет вид линейной комбинации взвешенных частных критериев, позволяющей учитывать особенности траекторного движения и сложность этапов управления посредством «взвешивания» частных и общих оценок как по движениям, так и по этапам посадки. Показана существенная неоднородность влияния вариаций различных параметров полёта на точность и безопасность посадки, необходимость учёта взаимовлияния бокового и продольного движения, а также поэтапной сложности управления.
4. Разработаны алгоритм и методика автоматизированного контроля качества управления движением ЛА при посадке. Основным содержанием методики является процедура использования обобщённого критерия в реальном масштабе времени. Предложенная методика позволяет:
— повысить информативность траекторного контроля;
— обеспечить объективность контроля в РМВ;
— оценить потребные ресурсы вычислительных средств для аппаратной реализации и обоснования основных требований к ним. Работоспособность методики проверена путём автоматизированной обработки на ЦВМ записей средств объективного контроля при выполнении посадок самолета типа Су-27 с использованием разработанного автором спецматобеспечения. Использование методики при наличии неоходимых аппаратных средств контроля обеспечит существенное снижение аварийности на заключительном этапе полёта.
5. По результатам исследований предложены варианты аппаратной реализации средств траекторного контроля и сформированы основные требования к ним.
Список литературы
- Кибардин Ю. А. О связи задач теории БзП и боевой эффективности. НММ по БзП. М.: ВВИА им. Н. Е. Жуковского, 1981 г.
- Крыжановский Г. А., Ковалев Ю. Е. Определение повазателей для оценки технологии работы оперативно-диспетчерского персонала. -Сб.тр. 30 юб. НТК аспирантов и молодых ученых, -АГА, 1998.
- Алексеев А. И. Формула надёжности: человек-самолёт-среда. 1993 г.
- Жмеренецкий В. Ф. Методические принципы создания авиационных систем повышения БзП. НММ по БзП. -К.: КВВАИУ, 1992 г.
- Кибардин Ю. А., Качалкин А. Н. Некоторые вопросы теории БзП. НММ. -М.: ВВИА им. Н. Е. Жуковского, 1981 г.
- Отчет по НИР № 8 343 784, 30 ЦНИИ, 1984 г.
- Ковалев Ю.Е. Концепция и аппаратное исполнение системы посадки гидросамолетов, -Сб. тр. Междунар НТК, Геленджик, 1999.
- Володин В. А. О методах и критериях оценки качества посадки JIA. Научно-технический сборник «Летательные аппараты и авиационные двигатели». К.: КВВАИУ, 1992 г., вып. 11.
- Отчёт по НИР № 9 116, К.: КВВАИУ, 1992 г.
- Отчёт по НИР № 9 277 093, ЗО ЦНИИ, 1992 г.
- Отчёт по НИР № 9 024, К.: КВВАИУ, 1991 г
- Отчёт по НИР № 29 023, К.: КВВАИУ, 1991 г.
- Отчёт по НИР № 9 148 592, ЗО ЦНИИ, 1992 г.
- Володягин В. А. О проблемах автоматизации рабочего места РП. Научно-технический сборник «Летательные аппараты и авиационные двигатели». К.: КВВАИУ, 1992 г., вып. И.
- Володин В. А. Исследование информативности параметров полёта о качестве посадки маневренного самолёта. НММ по БзП, 30 ЦНИИ. Д997.
- Володягин В. А. Определение области допустимых отклонений фазовых координат маневренного самолёта на заключительном этапе полёта. В сб. статей 33 ВНК, ч.1, К.: КВВАИУ, 1992 г.
- Петров А. М. Об оценке качества посадки маневренного самолёта. Материалы НТК по проблемам эксплуатации АТ, НИИРЭАТ, 1992, вып. 6541.
- Петров А. М. Об оптимальном уходе маневренного самолёта на второй круг. -В сб. статей 33 ВНК, ч. 1., К.: КВВАИУ, 1992 г.
- Володин В. А. Определение весовых коэффициентов оценок продольного и бокового движений маневренного летательного аппарата на посадке. НММ по БзП. К.: КВВАИУ, 1993 г.
- Петров А. М. Объективный критерий оценки качества посадки маневренного ЛА. Материалы межвузовского семинара ВВС «Анализ и синтез авиационных эргатических систем». К.: КВВАИУ, 1992 г., вып.4.
- Мацко Л. А. Об одном способе определения весовых коэффициентов этапов посадки // Научно-технический сборник «Летательные аппараты и авиационные двигатели». К.: КВВАИУ, 1992 г., вып. 11.
- Мацко Л. А. Алгоритм функционирования автоматизированной системы оценки качества посадки маневренного самолёта в реальном времени. Научно-технический сборник «Летательные аппараты и авиационные двигатели». К.: КВВАИУ, 1992 г., вып. 12.
- Мацко Л.А. Исследование оптимальных режимов ухода маневренного самолёта на второй круг. Материалы 16 НТК молодых учёных сотрудников, НИИРЭАТ, 1992 г., вып. 6554.
- Мацко Л.А. Методика автоматизированной оценки качества посадки маневренного самолёта в реальном времени. Научно-технический сборник «Летательные аппараты и авиационные двигатели». К.: КВВАИУ, 1992 г., вып. 12.
- Мацко Л.А. О наземных средствах объективного контроля в интересах автоматизированной системы оценки качества посадки ЛА. -В сб. статей 33 ВНК, ч.1. К.: КВВНИУ, 1992 г.
- Петров А. М. Об одном интегральном критерии оценки качества посадок маневренного самолёта. Материалы 15 Межвузовской НТК молодых учёных и специалистов, в/ч 48 230, 1992 г.
- Материалы ОЗ № 102, НИЦ 30 ЦНИИ, 1993 г.
- Володин В. А. К вопросу о контроле качества посадки ЛА. Научно-технический сборник «Летательные аппараты и авиационные двигатели». К.: КВВАИУ, 1992 г., вып. 11.
- Водягин В. А. Входные устройства ВРД. Учебное пособие. -Л.: Л ВАТУ, 1990 г.
- Медведев В. Д. Авиационный двигатель и его системы. Учебное пособие. -Л.: ЛВАТУ, 1990 г.
- Устройство для управления разворотом самолёта, а. с. № 1 457 363.
- Устройство для контроля качества посадки летательного аппарата, 3. № 4 904 770.
- Устройство индикации положения летательного аппарата при заходе на посадку, а. с. № 1 363 704.
- Система для контроля качества посадки летательного аппарата, пат. № 5 018 846.
- Система для контроля качества посадки маневренного летательного аппарата, пат. № 5 047 452.
- Информационный выпуск по лётным происшествиям и предпосылкам к ним. -в/ч 62 632, 1970−1999 гг.
- Анализ состояния безопасности полётов и профилактической работы в частях ВВС, 1980−1992 гг.
- Отчёт по НИР № 8 655 588, 30 ЦНИИ, 1988 г.
- Белогородский С. Л. Автоматизация управления посадкой самолёта. -М.: Транспорт, 1972 г.
- Микиртумов Э. В. Особенности взлёта и посадки современных самолётов. -М.: ВВИА им. Н. Е. Жуковского, 1981 г.
- Емельянов В. Н. Зарубежные специалисты об особенностях выполнения посадок самолётов. -Проблемы безопасности полётов, 1979 г., № 4.
- Захаров К. В., Курилкина П. В. Зарубежные исследования динамики взлёта и посадки самолётов. -ЦАГИ, Обзор № 460, 1975 г.
- Naval aviation news. -People-planes-places. 1991, № 1−2.
- Устинов А. В. Автореф. дис. .канд. тех. наук, в/ч 26 923, 1989 г.
- Корабельные и аэродромные средства для укороченной посадки самолётов. -ЦНИИ «Румб», 1985 г.
- Кузькин Е. А. Автореф. дис. .канд. тех. наук, 30 ЦНИИ, 1989 г.
- Колногоров В. В. Автореф. дис. .канд. тех. наук, ЗО ЦНИИ, 1993 г.
- Дж. Б. Хелливел -The Aeronautical Quatuly, 1992 г., ч. 3.
- Шилов В. С. Особенности полётов самолётов и вертолётов. -Л.:1 ЦНИИ МО, 1987 г.
- Ковалев Ю.Е. Исследование оптико-электронных каналов внешнетраекторного контроля ВС на взлетно посадочных режимах -Сб. тр. Междунар. НТК «Авионика-98 «, Киев, 1998.
- Крыжановский Г. А., Ковалев Ю. Е. Определение рациональной структуры оптических сигналов информационной поддержки операторов морской авиации при посадке, -Межвуз. Тем. Сб., АГА, 1999.
- Крыжановский Г. А., Ковалев Ю. Е. Концепция распределенно-централизованной подготовки офицерских кадров на базе головного авиационного ВУЗа. -Сб.тр. 31 НТК, АГА, 2000.
- Руководство по организации и проведению обучения ОДП в В АУЛ. -М.: Воениздат, 1974 г.
- Шишкин В. А. Объективный контроль и объективность. Авиация и космонавтика, 1987 г., № 4.
- Методическое пособие по обработке и анализу материалов объективного контроля. Изд. № 11/1742 р, т. 81, 1981 г. ль
- Методическое пособие по расчёту и нанесению положения линий целей на индикаторах системы РСП, вып. 4024, 1978 г.
- Маценко С. П. Системы и средства управления посадкой самолётов. -М.: Мир, 1968 г.
- Борисов Б. Т. Автореф. дис. .канд. тех. наук, -Рига, 1984 г.
- Управление и руководство полётами. Методическое пособие, Николаев, 1983 г.
- Бортовые устройства регистрации полётных данных. Учебное пособие. Под. ред. И. П. Коровина. -К.: КВВАИУ, 1989 г.
- Отчёт № 1290−80−1V, п/я В-8759,1980 г.
- Критерии оценки качества посадки самолётов по данным бортовых средств регистрации полётной информации. -М.: НИИГА, 1985 г.
- Положение об организации объективного контроля полётов в авиации ВС, -Воениздат, 1982 г.
- Руководство полётами в частях авиации ВС. Методическое пособие, 1987 г.
- Курс боевой подготовки истребительной авиации-86. Лётная подготовка. -М.: Воениздат, 1986 г.
- Бортовая система регистрации параметров полёта «ТЕСТЕР-УЗ». Инструкция по эксплуатации, 1977 г., книга 8.
- Бриктсон С. А., Чиаварелли Э. П., Дж. Вулфек Критерии оценки захода самолётов на посадку. Технический перевод № 489, 1970.
- Огнев А. А. К вопросу о критериях экспресс оценки техники пилотирования пилотов ГА. -в сб. Авиационная эргономика. -К.: Киев, КНИГА, 1977 г., вып. 3.
- Критерии оценки качества посадки самолётов по данным бортовых средств регистрации полётной информации. -М.: ГосНИИГА, 1985 г.
- Неводничий В. И. Автореф. дис. .канд. тех. наук, ОЛАГА, 1987 г.
- Жуковский М. А. Автореф. дис. .канд. тех. наук, Рига, 1988 г.
- Бортничук В. А. Методика оценки уровня безопасной посадки маневренных самолётов в неблагоприятных метеоусловиях, -в сб. Обеспечение безопасности полётов, -М.: ВВИА им. Н. Е. Жуковского, 1991 г.
- Система автоматизированной обработки информации «Луч-74». Методическое пособие под ред. Ерохина Г. Н. -М.: ВВИА им. Н. Е. Жуковского, 1988 г.
- Молоканов Г. Ф. Объективный контроль точности самолётовождения. -М.: Воениздат, 1980 г.
- Бендат Д., Пирсол А. Применение корреляционного и спектрального анализа. -М.: Мир, 1983 г.
- Хан Г., Шапиро С. Статистические модели в инженерных задачах. -М.: Мир, 1969 г.
- Красовский А. А. Системы автоматического управления полётом и их аналитическое конструирование. -М.: Наука, 1973 г.
- Бабенко В. И., Куценко А. В. Пилотажно-навигационные и комплексные тренажёры. -.: Киев, 1970 г.
- Балабанов А. А. Автореф. дис. .канд. тех. наук, КВВАИУ, 1989 г.
- Фишер Р. А. Статистические методы для исследователей. -М.: Мир, 1958 г.
- Елисеева И. И. Статистические методы измерения связей / Под ред. А. А. Жигарева. -Л.: ЛГУ, 1992 г.
- Дрейпер Н., Смит Г. Прикладной регрессионный анализ. -М.: Мир, 1973 г.
- Езекиел М., Фокс К. Методы анализа корреляций и регрессий линейных и криволинейных. -М.: Статистика, 1986 г.
- Пустыльник Е. И. Статистические методы анализа и обработки наблюдений. -М.: Наука, 1978 г.
- Хейс Д. Причинный анализ в статистических исследованиях. -М.: Финансы и статистика, 1981 г.
- Бородкин Ф. М. Об одной схеме причинного анализа. -В кн. Математика и социология, 1972 г.
- Рукавишников В. О. Информационный подход к причинному анализу. -В кн. Модели социально-экономических процессов и социальное планирование. -М.: Мир, 1979 г.
- Румшинский Л. 3. Математическая обработка результатов эксперимента. -М.: Наука, 1971 г.
- Смирнов Н. В., Дудин-Барковский Н. В. Курс теории вероятностей и математической статистики для технических приложений. -М.: Наука, 1969 г.
- ГОСТ 11.006−74 Правила проверки согласия опытного распределения с теоретическим. -М.: Изд. Стандартов, 1979 г.
- Руководство для конструкторов по проектированию самолётов. -ЦАГИ, 1984, т. 1, кн. 8, вып. 4.
- Красовский А. А. Фазовое пространство и статистическая теория динамических систем. -М.: Наука, 1974 г.
- Белогородский С. Л. О некоторых вопросах предпосадочного маневрирования. -М.: ОНТИ ГосНИИ ГВФ, 1984 г.
- Горячев В. А. К вопросу о выборе наивыгоднейших методов предпосадочного манёвра. -М.: ОНТЭИ ГосНИИ ГА, 1979 г.
- Тер-Саакянц Г. Л. Автореф. дис. .канд. тех. наук, Киев, 1975 г.
- Титов А. А. О методе построения области возможных заходов самолёта на посадку. НММ по обеспечению безопасности полётов. -М.: ВВИА им. Н. Е. Жуковского, 1990 г.
- Смуров М. Ю. Об одном методе построения области допустимых отклонений самолёта в момент приземления. в кн. Автоматизированные системы УВД в ГА. -Л.: АГА, 1978 г.
- Тотиашвили Л. Г. Аэродинамические проблемы, связанные с разработкой математических моделей «самолёт-пилот-среда», -в кн. Цифровое моделирование движения воздушных судов ГА в сложных условиях. -Р.: РКИИГА, 1983 г. *
- Габасов Р., Кириллова Ф. М. Принцип максимума в теории оптимального управления. -М.: Наука и техника, 1974 г.
- Тараненко В. Т., Момджи В. Г. Прямой вариационный метод в краевых задачах динамики полёта. -М.: Машиностроение, 1986 г.
- Батенко А. П. Управление конечным состоянием движущихся объектов. -М.: Сов. радио, 1977 г.
- Янг Л. Лекции по вариационному исчислению и теории оптимальных процессов. -М.: Мир, 1974 г.
- Эльмсгольц Л. Э. Вариационное исчисление. -М.: Гостехиздат, 1958 г.
- Гюнтер Н. М. Курс вариационного исчисления. -М.: Гостехиздат, 1941 г.
- Ахиезер Н. И. Лекции по вариационному исчислению. -М.: Гостехиздат, 1955 г.
- Кротов В. Ф., Букреев В. 3., Гурман В. И. Новые методы вариационного исчисления в динамике полёта. -М.: Машиностроение, 1989 г.
- Тараненко В. Т. Опыт применения методов Ритца, Пуанкаре и Лепунова к решению задач динамики полёта. -М.: ВВИА им. Н. Е. Жуковского, 1988 г.
- ПЗ.Хофер Э., Лундерпггедт Р. Численные методы оптимизации. -М.: Машиностроение, 1981 г.
- Автоматизация процессов управления воздушным движением: Учебное пособие / Ю. П. Дарымов, Г. А. Крыжановский, В. А.
- Солодухин, В. Г. Кизько, Б. А. Киров. Под ред. Г. А. Крыжановского. -М.: Транспорт, 1981 г.
- Методы оптимизации с приложением к механике космического полёта. / Под ред. Д. Лейтмана. -М.: Наука, 1985 г.
- Мак-Кракен Д., Дорн У. Численные методы и программирование на Фортране. -М.: Мир, 1977 г.
- Бибиков Ю. Н. Курс обыкновенных дифференциальных уравнений. -М.: Высшая школа, 1991 г.
- Александров А. Д., Фёдоров С. М. Системы цифрового управления полётом. -М.: Машиностроение, 1983 г.
- Инструкция лётчику самолёта Су-27, 1980 г.
- Харман Г. Современный факторный анализ. -М.: Мир, 1992 г.
- Лоули Д., Максвелл М. Факторный анализ как аналитический метод. -М.: Мир, 1987 г.
- Адамов В. Е. Факторный индексный анализ. -М.: Мир, 1987 г.
- Ибела К. Факторный анализ. -М.: Мир, 1980 г.
- Авен П. О. Построение интегрального показателя в критериальном пространстве. -Автоматика и телемеханика, 1985 г., № 4.
- Жулёв В. И., Иванов В. С. Безопасность полётов летательных аппаратов. -М.: Транспорт, 1986 г.
- Хамракулов И. В., Зубков Б. В. Эффективность использования полётной информации. -М.: Транспорт, 1991 г.
- Евланов Л. Г. Контроль динамических систем. -М.: Наука, 1979 г.
- Литвинчук Н. И. Использование информации средств объективного контроля для непосредственного определения причин отклонений в параметрах полёта и ошибок лётчика. НММ по обеспечению безопасности полётов. -М: ВВИА им. Н. Е. Жуковского, 1984 г.
- Эльясберг П. Е. Определение движения по результатам измерений. -М.: Наука, 1976 г.
- Боднер В. А. Оптимизация терминальных стохастических систем. -М.: Машиностроение, 1987 г.
- Шураков В. В., Дайинтбегов Д. М. Автоматизированное рабочее место для статистической обработки данных. -М.: Финансы и статистика, 1990 г.
- Соломонов П. А. Безотказность авиационной техники и безопасность полётов. -М.: Транспорт, 1977 г.
- Организация, методы и средства управления воздушным движением. Научно-техническая информация, № 6−7, 1992 г.
- Панин М. Н. Технические средства обеспечения полётов. -Зарубежное военное обозрение, 1982 г., № 4.