Решение нелинейных задач строительной механики
Метод шагового нагружения. Процедура изложенных выше методов направлена на ликвидацию невязки между истинным и получаемым значением перемещений при заданной постоянной нагрузке. Однако возможны и другие подходы. К ним относится метод шагового нагружения, который является вариантом метода продолжения по параметру. Метод был предложен В. 3. Власовым и затем разработан В. В. Петровым. Нагрузка… Читать ещё >
Решение нелинейных задач строительной механики (реферат, курсовая, диплом, контрольная)
В задачах динамики реализуется шаговый метод, когда процесс колебаний во времени делится обычно на равные отрезки времени At, от величины которых существенно зависят не только точность и скорость вычислений, но и сходимость итерационного процесса. Шаг времени At рекомендуется принимать порядка 0,1 Г, где Г, — период собственных колебаний массы.
При решении задач динамики зависящими от перемещений могут быть не только жесткость, по и демпфирующие свойства конструкции. Рассмотрим шаговую процедуру для случая, когда масса остается постоянной в процессе колебания, что обычно имеет место в строительных конструкциях. Подобные задачи целесообразно решать в приращениях перемещений. С этой целью запишем уравнение (1.27) для произвольной нагрузки и произвольного времени t: 
Теперь запишем это же уравнение для времени t + At, оставив неизменными неупругое и упругое сопротивления на этом отрезке времени:

Вычтем из уравнения (6.4) уравнение (6.3). В итоге получим уравнение движения массы в приращениях:

где для краткости записи введены обозначения.

Уравнение (6.5) можно проинтегрировать различными способами.
Например, в работе 1291 предложена простейшая процедура, когда на промежутке времени At ускорение изменяется линейно, скорость — квадратично, а перемещение — по кубическому закону, как показано на рис. 6.4. Из рисунка очевидно, что приращения для времени t + At определяются следующими выражениями:
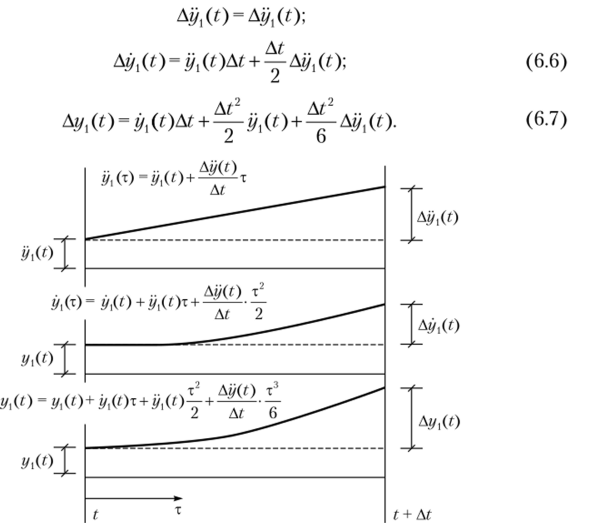
Рис. 6.4. Изменение ускорения, скорости и перемещения на отрезке времени At.
В качестве неизвестных, как было отмечено, принимаются приращения перемещений. Запишем через них приращения для ускорения и скорости. Из выражения (6.7) имеем.

Подставим это в выражение (6.6):

Подставим найденные значения приращений в выражение (6.5) п запишем это уравнение относительно Ai/(t):
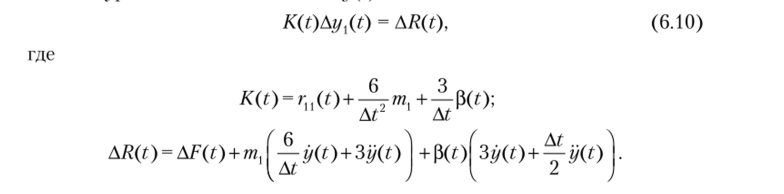
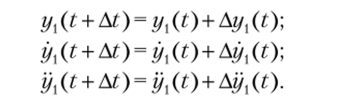
Процедура расчета состоит в следующем. На основе результатов предыдущего этапа при принятом значении Д? определяются K (t) и AR (t) (на первом шаге учитываются начальные условия). Затем из формулы (6.10) вычисляются приращения перемещений. По формулам (6.8) и (6.9) подсчитываются приращения ускорения и скорости. Полные значения величин находятся путем суммирования:
По новым значениям уточняются величины rn(? + At), Р (? + At) и опять вычисляются K (t) и AR (t). Затем решается уравнение (6.10) и т. д.
Изложенная процедура подкупает своей простотой. Однако следует иметь в виду, что сходимость этого процесса условная. В книге [ 141 приведен пример, в котором процесс решения задачи расходится. Поэтому иногда приходится отказываться от положения о том, что на промежутке времени At значения р (?) и ru(t) остаются неизменными. Для улучшения сходимости рекомендуется на каждом шаге по времени уточнять указанные значения по заданным зависимостям путем итерационного процесса, т. е. уравнение (6.10) на каждом шаге по времени уже решается путем итераций по нелинейной жесткости. Процесс продолжается до тех пор, пока значения приращения перемещений в двух смежных итерациях не будут удовлетворять заданному условию точности, и только после этого переходят к следующему шагу, но времени. Разумеется, такое усложнение резко увеличивает трудоемкость расчета и затраты машинного времени. Изложенный шаговый метод (без итераций на каждом шаге по времени) в полной мере применим к решению линейных задач динамики.
Изложенный метод и ряд других кратко представлены в матричной форме на примере уравнений метода конечных элементов:[1]

ее линейной составляющей: К (Z) = К + К|1е11, где второй член полностью охватывает нелинейность в рассматриваемой конструкции. Принимая во внимание указанное деление, запишем уравнения (6.11) в следующем виде:

VJ IIC.'I ' '.

К решению этих уравнений можно применить процедуру последовательных приближений где Из формулы (6.13) имеем: Zs = -К ]PS_V Обращение матрицы К происходит только один раз.
Таким образом, на каждом этапе достаточно решать систему линейных алгебраических уравнений (6.13) с постоянными правыми частями, значения которых уточняются по формуле (6.12) на основе результатов, полученных на предыдущем этапе. Процедура метода показана на рис. 6.5, б. От Р0 определяется Z,. Через Zx находится Р, и определяется Z2 и т. д. Метод упругих решений очень прост. Однако этот метод, как и предыдущий, сильно зависит от характера нелинейности. Число итераций существенно зависит от точности начального приближения. Процедура плохо сходится при большой разнице между линейными и нелинейными решениями, в частности при значительных пластических деформациях. При некоторых формах кривой Р —Z-процесс оказывается осциллирующим [20].
3. Метод Ньютона — Рафсона. Этот метод еще называется методом касательных. Он является наиболее популярным. Пусть для некоторого 5-го приближения при решении уравнения (6.12) получили невязку [5]v:

Дадим узловым перемещениям Z некоторые малые приращения AZ, а затем для нового положения системы, определяемого перемещениями (Z + AZ), невязку |5(Z)| разложим в ряд Тейлора и оставим только два члена:

Полагая, что выбранные приращения tsZ- превращают невязку (6.16) в нуль, будем иметь.

Подставим в равенство (6.17) выражение (6.15) и продифференцируем по Z-. В результате получим.

где элементы матрицы ДКШ11 определяются по формуле.

Решение системы линейных алгебраических уравнений (6.16) дает приращение, а по ним находятся уточненные значения Z-. Zv+1 = Zs + (AZ)s_,.
После этого Zs+i подставляются в формулу (6.15), находятся невязки [8(Z)|5+1, затем по формуле (6.17) вычисляются элементы матрицы ДКнел и решается система уравнений (6.16), найденные значения подставляются в (6.18) и опять переходят к уравнениям (6.15).
Графическое изображение процедуры метода Ньютона — Рафсона показано на рис. 6.5, в. На графике наклонные линии уже не параллельны, так как [К + ДК" J меняется на каждом шаге. График показывает, что в методе Ньютона — Рафсона заметно сокращается число итераций.
Недостатком метода является необходимость уточнения и обращения матрицы [к + ДК|1С |] на каждом шаге. Этого можно избежать, если для определения поправок [AZis+l вместо уравнения (6.18) использовать уравнение K[AZ;]S+I = [6(Z)]s, что ведет к увеличению числа итераций.
Введение
указанных изменений дает модифицированный метод Ньютона — Рафсона. Его графическое изображение представлено на рис. 6.5, г.
4. Метод шагового нагружения. Процедура изложенных выше методов направлена на ликвидацию невязки между истинным и получаемым значением перемещений при заданной постоянной нагрузке. Однако возможны и другие подходы. К ним относится метод шагового нагружения, который является вариантом метода продолжения по параметру. Метод был предложен В. 3. Власовым и затем разработан В. В. Петровым. Нагрузка делится на отдельные доли (можно равные). На первом этапе решается линейная задача. В этом одно из преимуществ метода. Он не требует начального приближения. С помощью найденных перемещений матрица жесткости К (Z) уравнений (6.11) пересчитывается и процесс повторяется. Например,.
Графическое изображение процесса представлено на рис. 6.5, д.
Недостатком метода является возможность отклонения от точного решения, как показано на рис. 6.5, д. Поэтому рекомендуется через несколько шагов ликвидировать невязку с помощью одного из изложенных выше методов, что приводит уже к следующему методу.
5. Самокорректирующий метод [20]. В работе Стриклина, Хейслера и Риземого[2] был предложен так называемый самокорректирующий метод, идея которого состоит в совместной реализации непосредственной ликвидации невязки 8 и ее минимизации по параметру нагружения. Такое объединение достоинств в пределах одного метода позволяет устранить недостатки, присущие ранее изложенным методам.
Не касаясь деталей их предложений, где для решения задачи используется и метод конечных разностей, приведем условную схему вычислений комбинации метода шагового нагружения и метода Ньютона — Рафсона.
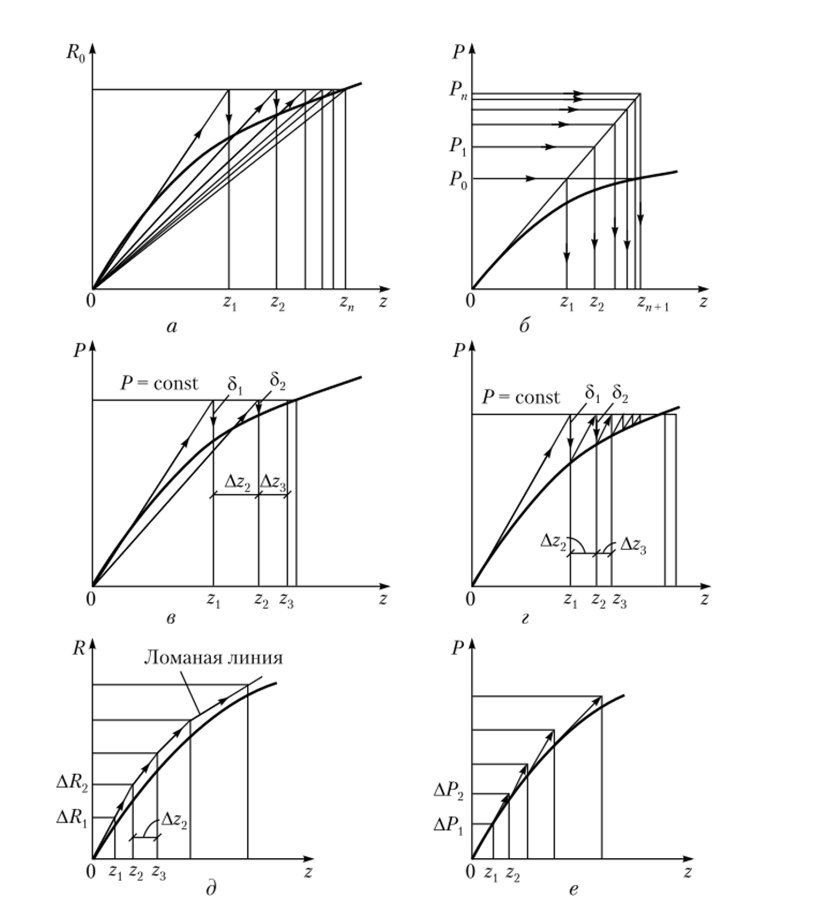
Рис. 6.5. Графическое представление решения нелинейных уравнений.
(рис. 6.5, е). При использовании метода Ньютона — Рафсона можно использовать его модифицированный вариант, что, естественно, ведет к более медленной сходимости решения. Из рис. 6.5, е очевидно, что ломаная линия на рис. 6.5, д разрывается на каждом этапе и приближается к истинному значению. В упомянутой выше работе Стриклина, Хесмара и Риземого утверждается, что вычисление энергии целесообразно проводить на основе МКЭ, т. е. локально, но решать сами нелинейные уравнения порой оказывается проще и нагляднее с помощью метода конечных разностей.
Каждый из приведенных выше методов имеет свою область применения. Рекомендовать какой-то один из них для решения любых задач было бы неосмотрительно. Более того, все они — не без недостатков. Поэтому работы в направлении совершенствования методов решения нелинейных задач ведутся до сих пор, и в ряде случаев получены удачные варианты методов при решении конкретных задач строительной механики.
- [1] Метод последовательных приближений. В этом методе значения элементов матрицы жесткости К (Z) на каждом этапе решения системы уравнений (6.11) определяются через значения перемещений, полученных на предыдущем этапе, т. е. K (ZS_,)ZS = -R0, где s — номер приближения. На первомэтапе (.v =1) значения элементов матрицы жесткости К берутся как для линейной задачи. Процесс последовательных решений уравнений (6.11) с процедурой уточнения элементов матрицы жесткости, которая выполняется на каждом этапе, продолжается до тех пор, пока разница между результатами, полученными на смежных этапах, не будет достаточно малой [20]. На рис. 6.5, аизложенная процедура представлена графически (здесь и далее на графикахпредставляется процесс уточнения одного неизвестного перемещения Z;). Описанный процесс при всей своей простоте обладает существеннымнедостатком, состоящим в том, что при сильной нелинейности он оказывается слабо сходящимся, а иногда и расходящимся. 2. Метод упругих решений [20]. Этот метод по сравнению с предыдущимприводит к определенному уменьшению общей трудоемкости вычислительных операций. Он основан на выделении из матрицы жесткости системы К (Z)
- [2] Стриклин Дж., Хейслер В., Риземан В. Оценка методов решения задач строительной механики, нелинейность которых связана со свойствами материала и (или) геометрией // Ракетная техника и космонавтика. 1973. № 3. С. 45—56.