Принцип частотного метода регулирования скорости асинхронного двигателя заключается в том, что, изменяя частоту питающего напряжения, можно изменять угловую скорость nо магнитного поля статора
Электрические каскады, в которых цепь ротора подключается к преобразователю частоты ПЧ (на рис. 5.92,а в качестве Пр используется ПЧ), способному как потреблять энергию скольжения, так и доставлять энергию двигателю на частоте скольжения, то есть управлять потоком энергии в цепи ротора, как в прямом, так и в обратном направлении, называются каскадами с АД, работающими в режиме машины двойного… Читать ещё >
Принцип частотного метода регулирования скорости асинхронного двигателя заключается в том, что, изменяя частоту питающего напряжения, можно изменять угловую скорость nо магнитного поля статора (реферат, курсовая, диплом, контрольная)
Этот способ обеспечивает плавное регулирование скорости в широком диапазоне, а механические характеристики обладают высокой жесткостью.
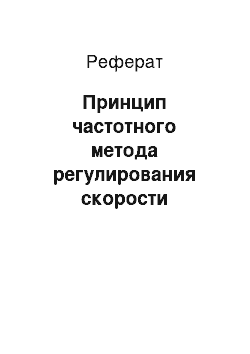
Схема частотного электропривода приведена на рис. 5, а механические характеристики АД при частотном регулировании — на рис. 6.


Рис. 5. Схема частотного электропривода Рис. 6. Механические характеристики асинхронного двигателя при частотном регулировании
Частотное регулирование скорости асинхронного двигателя позволяет изменять частоту вращения в диапазоне (20 — 30): 1. Частотный способ является наиболее перспективным для регулирования асинхронного двигателя с короткозамкнутым ротором. Потери мощности при таком регулировании невелики, поскольку минимальны потери скольжения.
Каскадное регулирование скорости АД
Каскадными называют такие схемы включения АД, которые, обеспечивая регулирование его скорости, позволяют использовать энергию скольжения путём отдачи её в сеть или превращения её в механическую энергию, передавая её на вал двигателя при включении в цепь ротора регулируемой ЭДС.
По способу использования энергии скольжения различают две принципиально разные схемы.
Электрический каскад (рис. 5.92,а) — энергия скольжения за вычетом потерь в преобразователе возвращается в сеть. Между элементами преобразователем и асинхронным двигателем имеются только электрические соединения.
Электромеханический каскад (рис. 5.92,б) — энергия скольжения через преобразователь за вычетом потерь поступает на вал вспомогательного двигателя ВД, механически связанного с валом главного двигателя АД.
На вал от АД поступает механическая мощность.
от вспомогательного двигателя ВД.

в результате суммарная механическая мощность РВ на валу каскада.

Если пренебречь потерями в каскадной схеме, то можно установить, что механическая мощность каскада равна электромагнитной мощности, передаваемой на ротор АД. Электромеханический каскад называют каскадом постоянной мощности, электрический каскад — каскадом постоянного момента.

Рис. 5.92. Схемы, а — электрическогои б — электромеханического каскадов
Электрические каскады, в которых цепь ротора подключается к преобразователю частоты ПЧ (на рис. 5.92,а в качестве Пр используется ПЧ), способному как потреблять энергию скольжения, так и доставлять энергию двигателю на частоте скольжения, то есть управлять потоком энергии в цепи ротора, как в прямом, так и в обратном направлении, называются каскадами с АД, работающими в режиме машины двойного питания (МДП). При таком способе управления, когда частота в роторе постоянна, скорость АД на холостом ходу определяется разностью частот статора и ротора.

В качестве преобразователя в каскадных установках могут использоваться: синхронная машина, коллекторная машина переменного тока, или вентильные преобразователи (в том числе и преобразователи частоты ПЧ).