Анализ алгоритмов подстройки порога срабатывания для QRS комплексов
В данной статье рассматривается проблема адаптивного порога срабатывания для выделения R-зубца при Холтеровском мониторировании. Рассмотрен один из вариантов реализации микроконтроллерного алгоритма детектирования R-зубца. На основе этого алгоритма произведен анализ устойчивости при двух вариантов предсказания порога срабатывания и различных коэффициентов. Получены графики зависимости… Читать ещё >
Анализ алгоритмов подстройки порога срабатывания для QRS комплексов (реферат, курсовая, диплом, контрольная)
Аннотация
В данной статье рассматривается проблема адаптивного порога срабатывания для выделения R-зубца при Холтеровском мониторировании. Рассмотрен один из вариантов реализации микроконтроллерного алгоритма детектирования R-зубца. На основе этого алгоритма произведен анализ устойчивости при двух вариантов предсказания порога срабатывания и различных коэффициентов. Получены графики зависимости устойчивости алгоритма от выбранных коэффициентов.
Ключевые слова: микроконтроллер, Холтеровское мониторирование, QRS — комплекс, электрокардиосигнал, адаптивный порог срабатывания, выделение R-зубца, электрокардиография, алгоритм подстройки порога срабатывания.
Электрокардиограмма (ЭКГ) — графическое представление разностей потенциалов, возникающих на поверхности тела во время сокращения сердечной мышцы. Электрокардиография, как метод исследования сердечнососудистой системы человека, является специфическим методом диагностики заболеваний сердца, а так же анализа реакции организма человека на нагрузки во время тренировок.
Электрокардиограмма представляет собой периодическую последовательность кардиоциклов. Вид типового кардиоцикла показан на рисунке 1 [1,2]. В портативных устройствах для анализа ЭКГ чаще всего используют выделение R-зубца и последующим анализом RR-интервала.
При анализе ЭКГ в системе реального времени предъявляются повышенные требования к алгоритмам обработки сигналов [3]. Данные алгоритмы представляют собой компромисс между производительностью и точностью [4 — 6]. Одной из проблем таких алгоритмов является изменение амплитуды и формы R-зубца в зависимости от устройства, пациента, размещения электродов на теле пациентов, причем амплитуда пиков может изменяться у одного и того же пациента с течением времени [2,4].
В настоящее время уже существует достаточно большое количество алгоритмов, как выделения, так и адаптивной подстройки порога срабатывания выделение R-зубца [7−12]. Далее приведен анализ некоторых алгоритмов подстройки порога срабатывания.
Алгоритм выделения R-зубца. Данный алгоритм основан на выделения R-зубца из фильтрованного сигнала, прошедшего дополнительную цифровую обработку [3]. На вход системы поступают сигналы с АЦП, которые проходят последовательно фильтр высоких и низких частот.
Фильтр высоких частот представляет собой фильтр Баттерворта первого порядка. Для удобства АЦ преобразования электрокардиосигнал, который находится как в положительной, так и в отрицательной полуплоскостях, смещают в положительную область. Для устранения возможного смещения уровня аналоговой земли и дрейфа изолинии используется фильтр высоких частот, с частотой среза, как правило, около 1 Гц.

Рис. 2 — Дрейф изолинии.
Основные частотные составляющие QRS-комплекса сосредоточены в диапазоне 1−25 Гц [10]. Для того что бы снизить влияние высокочастотных импульсных помех применяются фильтры нижних частот с частотой среза порядка 20−25 Гц. В данном случае использовался фильтр Баттерворта второго порядка с частотой среза 20 Гц. Параметры фильтров значительно влияют на качество анализа параметров ЭКГ.
Функциональный модуль КФ представляет собой сложную функцию, отслеживающую крутизну фронтов (скорость изменения) входного сигнала, математически описываемую выражениями:

.

.
.
где X — входные отсчеты кардиосигнала, K и M — масштабные коэффициенты, индекс w — является константой, указывающей на смещение отсчета кардиосигнала относительно i-го элемента, данный коэффициент зависит от частоты дискретизации сигнала. Длительность обычного R зубца у здорового человека в грудных отведениях составляет 30−60 мсек [1,2], тогда для частоты съема ЭКГ 500 Гц и окна задержки, размером половины R зубца, коэффициент w будет от 14 до 30.
Анализ алгоритмов подстройки порога срабатывания. В данной работе рассматриваются два алгоритма подстройки порога срабатывания. Алгоритм № 1 заключается в том, что находится максимальное значение функции, порог устанавливается как некоторый процент от этого максимального значения. Далее этот порог со временем декрементируется. При значениях функции больше текущего порога срабатывания происходит перерасчет параметров. При анализе алгоритма фADAPTIVE устанавливалось значительно меньше периода следования кардиоциклов.

Рис. 3 — Алгоритм № 1
Алгоритм № 2 предсказывает (аппроксимирует) следующее значение порога на основе значений двух предыдущих кардиоциклов, математически это можно описать следующим образом:
где treshold — порог срабатывания, TH1 и и TH2 — текущее и предыдущее значения пиков функции, Kp и Kd — коэффициенты адаптации.
Если время отсутствия кардиоцикла превышает допустимую границу (как правило, это около 2с), то происходит постепенное уменьшение порога до тех пор, пока не будет зафиксирован новый кардиоцикл.

Рис. 4 — Алгоритм № 2
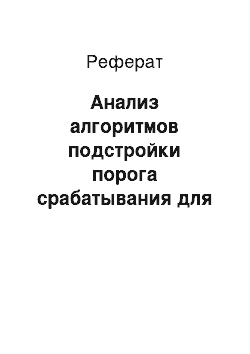
Тестирование. Анализ эффективности производился с помощью алгоритмов суточных записей ЭКГ, полученных при Холтеровском мониторировании. Под ложными срабатываниями понимается как детектирование кардиоцикла, если его не было, так и пропуск кардиоцикла, если было сердечное сокращение. Представленные результаты были получены при анализе одного и того же кардиосигнала длительностью 500 ударов. холтеровский микроконтроллерный детектирование На рисунке 5 показаны результаты анализа устойчивости алгоритма подстройки порогового значения № 1 в зависимости от коэффициентов a и b. Чем темнее область, тем меньший процент ошибок. Область, где процент ошибок составил менее 0.2% процентов можно приблизительно обозначить многоугольником со следующими вершинами (a, b): (0.8, 0.001), (0.2, 0.001), (0.2, 0.003), (1, 0.006) и (1, 0.002).

Рис. 5 — Градиентная схема распределения погрешностей.
На рисунке 6 представлена зависимость ложных срабатываний от коэффициента b при фиксированном значении коэффициента а. Как видим, увеличение коэффициента a приводит к увеличению области устойчивости в зависимости от коэффициента b.

Рис. 6 — График зависимости процента ошибок в зависимости от коэффициента b, при фиксированных значениях а.
Устойчивая область находится при малых значения b, на ширину и положение области можно влиять за счет изменения постоянной времени адаптации фADAPTIVE. Увеличение постоянной времени адаптации сначала приведет к небольшому расширению области устойчивости, при дальнейшем увеличении будет наблюдаться смещение вправо, поскольку увеличение постоянной времени алгоритма приведет к уменьшению скорости изменения порога срабатывания.

Рис. 7 — Градиентная схема распределения погрешностей.
На рисунке 7 показаны результаты расчета для алгоритма № 2. Области закрашенные более темным цветом, являются областями с более низким процентом ошибки. По осям отложены коэффициента Kd и Kp. Область, где процент ошибки < 0.2% можно примерно аппроксимировать многоугольником с вершинами (Kp, Kd): (0.45, 0.01), (0.45, 0.1), (0.52, 0.28), (0.6, 0.39), (0.6, 0.48) и (0.9, 0.01).

Рис. 8 — График зависимости процента ошибок от Kd при фиксированных значениях Kp.
На рисунке 8 показана зависимость процента ошибок от значений Kd при фиксированных значениях Kp. В данном случае, изменение коэффициента Kd нелинейно влияет на область устойчивости в зависимости коэффициента Kd. При этом наблюдается резкая граница перехода из области с низким процентом ошибок к высоким, когда для алгоритма № 1 это переход был достаточно плавным. Это приводит к тому, что небольшие изменения коэффициентов или характера сигнала могут привести к существенному ухудшению работы алгоритма.

Рисунок 9 — График зависимости процента ошибок от Kp при фиксированных значениях Kd.
На рисунке 9 показана зависимость процента ложных срабатываний от Kp при фиксированных значениях Kd. Уменьшение коэффициента Kd приводит к увеличению диапазона значений Kp, при которых алгоритм устойчив. При малых значениях Kp процент ошибок достаточно большой, но он плавно спадает с увеличением Kp. Это говорит о том, что порог поддерживается на слишком высоком уровне и некоторые комплексы не могут быть продетектированы. В данном случае алгоритм устойчив к выбросам, импульсным помехам, которые не могут быть достаточно эффективно отфильтрованы.
Заключение
Алгоритм № 2 имел большую область устойчивости по сравнению с первым алгоритмом. Причем, алгоритм № 2 можно модифицировать, добавив минимальный порог срабатывания:
Это делает алгоритм, в общем, более устойчивым, но требует оптимизации дополнительного параметра, чтобы добиться минимального процента ошибок детектирования.
Для различных выборок кардиосигналов область устойчивости работы алгоритма может незначительно изменяться. Таким образом, процесс оптимизации коэффициентов заключается в построении областей устойчивости по нескольким записям ЭКГ и определении пересечений этих областей.
Результаты исследований, изложенные в данной статье, получены при финансовой поддержке Минобрнауки РФ в рамках реализации госзадания № 213.01−11/2014;47 «Разработка систем диагностики состояния биологических и технических объектов с использованием алгоритмов анализа нестационарных сигналов».
- 1. Xiuyu Zheng, Zhen Li, Linli Shen, Zhen Ji, Detection of QRS complex based on biorthogonal wavelet, Information Science and Engineering, 2008. ISISE '08. International Symposium (Volume:2), pp. 502−506.
- 2. Суворов А. В. Клиническая электрокардиография. Нижний Новгород: НМИ, 1993. 124 с.
- 3. Беляев А. О. Микроконтроллерный алгоритм обработки ЭКС // Известия Южного Федерального Университета. Технические науки. 2008. № 11. С. 80 — 86.
- 4. Рябыкина Г. В., Соболев А. В. Вариабельность ритма сердца// Монография. М.: издательство «Оверлей», 2001. 54 с.
- 5. Тарасова И. А., Леонова А. В., Синютин С. А. Алгоритмы фильтрации сигналов биоэлектрической природы // Инженерный вестник Дона 2012, № 4. URL: ivdon.ru/ru/magazine/archive/n4p2y2012/1481.
- 6. Варнавский А. Н. Использование вегетативного индекса в аппаратуре для терапии гипертонической болезни // Инженерный вестник Дона 2013, № 4. URL: ivdon.ru/ru/magazine/archive/n4y2013/2051.
- 7. Changmok Choi, Younho Kim, Kunsoo Shin, A PD Control-based QRS Detection Algorithm for Wearable ECG Application, 34th Annual International Conference of the IEEE EMBS San Diego, California USA, 28 August — 1 September, 2012, pp. 5638−5641.
- 8. F Chiarugi1, V Sakkalis, D Emmanouilidou, T Krontiris, M Varanini, I Tollis Adaptive Threshold QRS Detector with Best Channel Selection Based on a Noise Rating System Computers in Cardiology, 2007, pp. 157−160.
- 9. Farahabadi, A, Farahabadi, E., Rabbani, H., Mahjoub, M. P, Detection of QRS Complex in Electrocardiogram Signal Based on a Combination of Hilbert Transform, Wavelet Transform and Adaptive Thresholding, Biomedical and Health Informatics (BHI), 2012 IEEE-EMBS International Conference on, pp. 170−173.
- 10. Xiaomin Xu, Ying Liu Adaptive Threshold for QRS Complex Detection Based on Wavelet Transform Engineering in Medicine and Biology Society, 2005. IEEE-EMBS 2005. 27th Annual International Conference, pp. 7281 — 7284.
- 11. Jiyin Zhao, Min Li, Weiwei Zhang, Ruirui Zheng, ECG Signal Adaptive Filtering and QRS Complex Detecting Method Biomedical Engineering and Informatics (BMEI), 2010 3rd International Conference (Volume:2), pp. 869 — 872.
- 12. Peng-Wie Hsia, Jolly, S.R., Mahmud R, Dynamic frequency spectrum analysis: application in organized and disorganized electrocardiographic signals, Computers in Cardiology, 1988. Proceedings, pp. 461−464.