Частные случаи основного уравнения для вращательного движения
Отметим, что поступательные и вращательные движения можно сложить и получить в итоге сложное движение с одним вектором поступательного движения (постоянным или переменным) и соответственно вращательное движение. Тело в этом случае будет двигаться по естественной пространственной траектории. Использование трех координат — осей позволяет более наглядно решать практические задачи с разложением… Читать ещё >
Частные случаи основного уравнения для вращательного движения (реферат, курсовая, диплом, контрольная)
Так как аналогом массы во вращательном движении является момент инерции —J, а силовым фактором силовой момент — М, то структура уравнений наиболее важных случаев вращательного движения будет аналогична вышеприведенным уравнениям (3.1)—(3.3).
При J = const из основного уравнения М = d (Jwi)/dt получаем.

Если главный момент М = const, dw/dt; = е0 = const, то угловое перемещение.

Это уравнения равноускоренного вращения.
При е = О 

Это уравнения равномерного вращения.
При М Ф const для функции М =/(/) из (3.4) получаем откуда.

В соответствии с формулами (3.5)—(3.7) решаются задачи вращательного движения, аналогичные нижеприведенным примерам поступательного движения. Общая форма уравнения статического равновесия вращательного движения (уравнение статики) из (3.4) при со = const.

Система общих уравнений динамики и статики в координатной системе
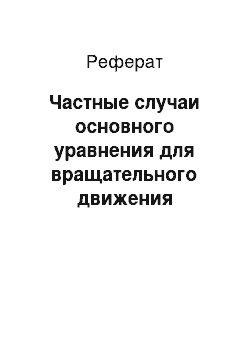
В реальном трехмерном пространстве положение любой точки (например, А) определяется тремя координатами х, у, г, т. е. расстояниями проекций точек (Л', А", А'") до соответствующих прямоугольных координат — осей (рис. 3.1).

Рис. 3.1. Скорости и угловые скорости в трехмерном пространстве.
Расстояние точки А до начала координат 0 (начала отсчета движения).

Соответственно, в каждой из трех плоскостей.

Относительно каждой оси возможно движение тел вдоль нее (поступательное) и вокруг оси (вращательное). Таким образом, имеем в общем случае шесть возможных разновидностей движения (Vx, Vy, V2, сод., сог/, ох).
Отметим, что поступательные и вращательные движения можно сложить и получить в итоге сложное движение с одним вектором поступательного движения (постоянным или переменным) и соответственно вращательное движение. Тело в этом случае будет двигаться по естественной пространственной траектории. Использование трех координат — осей позволяет более наглядно решать практические задачи с разложением (часто искусственным) силовых или кинематических факторов на слагаемые.
Исходя из сказанного, в координатной системе отсчета получаем не два уже рассмотренных уравнения динамики (1.2), (2.15), а тесть уравнений.

При этом равнодействующая.

В плоском движении (в координатах х — у) уравнения (3.10) и (3.11) примут вид (при т = const и J = const).

Система уравнений пространственной статики
В частном случае, при V = const (а = 0) или со = const (г = 0) получаем систему уравнений пространственной статики.

Уравнения статики выражают равновесие системы тел под действием приложенных к ней сил и моментов. В плоском движении имеем уже рассмотренные выше уравнения.

Здесь ^М2 — сумма моментов относительно оси, перпендикулярной данной плоскости.