Система определения ориентации по одномоментным измерениям в CPHC GPS/ГЛОНАСС
Количество измерений псевдофаз для однодиапазонного приемника очевидно равно Рх1, где I — число отслеживаемых одновременно всеми антеннами спутников. Для односистемного приемника, работающего только по одной системе ГЛОНАСС либо вРБ, обычно I > 5−6. Следовательно количество измерений псевдофаз для минимально возможного числа баз Р=2 (три антенны) будет не менее 10−12. Если предположить что Р=3… Читать ещё >
Содержание
- Глава 1. Модели наблюдений на основе первых и вторых разностей псевдодальностей и псевдофаз
- 1. 1. Математические модели исходных измерений псевдодальностей и псевдофаз
- 1. 2. Первые и вторые разности псевдодальностей и псевдофаз
- 1. 3. Уравнения связей первых и вторых разностей с параметрами ориентации. Кватернионная параметризация
- 1. 4. Уравнения связей первых и вторых разностей с параметрами ориентации. Параметризация по углам Эйлера
- 1. 5. Варианты аппаратурного построения системы определения ориентации
- 1. 6. Выводы по главе 1
- Глава 2. Постановка нелинейной задачи наименьших квадратов при неоднозначных измерениях. Критерий оценивания
- 2. 1. Выбор критерия оптимального оптимальной оценки параметров ориентации
- 2. 2. Выводы по главе 2
- Глава 3. Алгоритм поиска параметров ориентации по направлению на глобальный минимум линеаризованной функции невязок (алгоритм поиска по направлению)
- 3. 1. Алгоритм поиска параметров ориентации при линеаризации функции связи вторых разностей с параметрами ориентации
- 3. 2. Описание итерационной процедуры поиска глобального минимума нелинейной функции невязок и (ц)
- 3. 2. Выводы по главе 3
- Глава 4. Имитационное моделирование системы определения ориентации объекта. Оценка точности и надежности правильного разрешения неоднозначности
- 4. 1. Постановка задачи
- 4. 2. Планирование и проведения эксперимента на модели
- 4. 3. Выводы по главе 4
- Глава 5. Построение системы ориентации при работе по реальным сигналам. Тестирования и проведение натурного эксперимента для оценки качества работы системы ориентации
- 5. 1. Постановка задачи
- 5. 2. Блок схема аппаратного и программного обеспечения для тестирования системы ориентации по реальным сигналам
- 5. 3. Планирование и проведения эксперимента по реальному сигналу
- 5. 4. Выводы по главе 5
- Глава 6. Итерационный алгоритм модового поиска
- 6. 1. Алгоритм модового поиска
- 6. 2. Имитационное моделирование итерационного алгоритма модового поиска
- 6. 4. Выводы по главе 6
Система определения ориентации по одномоментным измерениям в CPHC GPS/ГЛОНАСС (реферат, курсовая, диплом, контрольная)
Для всех объектов, перемещающихся по поверхности Земли и в ее воздушном пространстве, одной из центральных задач является задача определения координат, вектора скорости и ориентации в пространстве. Для определения местоположения и углов ориентации использовали методы астронавигации, а так же датчики, измеряющие величину гравитационного и магнитного поля Земли. Позже стали применять радиотехнические средства, в том числе и спутниковые радионавигационные системы.
В последние годы всё большее применение находит режим относительной навигации в спутниковых радионавигационных системах, в котором благодаря обработке измерений псевдодоплеровских фаз ориентацию объекта и его относительное положение можно оценить с высокой точностью.
Данная работа посвящена вопросам построения системы высокоточной ориентации по спутниковым радионавигационным системам.
Актуальность темы
диссертации.
Для управления воздушными и морскими судами, а так же для решения геодезических задач применяют системы, которые проводят высокоточные измерения ориентации этих объектов. В последние годы активное применение находят спутниковые радионавигационные системы (СРНС) определения пространственной ориентации.
В существующих спутниковых системах определения ориентации (ADU2 компании Ashtech, TANS Vector фирмы Trimble, АТ4 компании JPS) сначала находят координаты базовых векторов, соединяющих фазовые центры антенн, а затем по базовым векторам определяют параметры ориентации. Недостаток ADU2 и TANS Vector состоит в низкой вероятностью правильного разрешения неоднозначности по одномоментным измерениям. АТ4 использует двухдиапазонные измерения, что приводит к увеличению вероятности правильного разрешения. Однако использование двухдиапазонных приемников существенно увеличивает цену системы определения ориентации.
Непосредственная оценка параметров ориентации позволяет значительно увеличить вероятность правильного разрешения неоднозначности по одномоментным измерениям однодиапозонного приемника. Однако описание решения задачи непосредственной оценки параметров ориентации при неоднозначных измерениях в литературе отсутствует. В данной работе предложен метод непосредственного определения параметров ориентации по спутниковым радионавигационным сигналам, который по целому ряду характеристик (время начальной инициализации, вероятность аномальной ошибки, динамика объекта) превосходит существующие.
Основные сведения по ориентации.
Ориентация объекта определяется взаимным (относительным) положением двух систем координат [12]. В радионавигации в качестве таких систем принимают локальную (LLS — Local Level System) и объектовую (BFS — body Fixed System) системы координат [4, 32]. Первая ось локальной системы направлена по местному меридиану на север, вторая ось ориентирована по местной вертикали вверх, а третья ось ориентирована на восток.
Вторая объектовая система координат определяется конструктивными особенностями объекта. Первая ось крена (roll) ориентирована вдоль оси объекта по ходу его движения, вторая ось курса (heading) направлена вверх, а третья ось тангажа (pitch) ориентирована направо относительно оси объекта.
Центры локальной и объектовой систем находятся в одной точке и совпадают с центром масс объекта.
Под ориентацией объекта понимают соответствующие углы поворота — курс, крен и тангаж, на которые нужно повернуть объектовую систему координат для того, что бы она совпала с локальной системой. [12].
Обзор аппаратуры для определения ориентации объекта.
Все используемые датчики ориентации можно разделить на два класса:
• позиционные датчики, дающие информацию о мгновенных значениях измеряемых углов ориентации.
• датчики угловых скоростей.
Позиционные датчики для определения ориентации используют разного рода внешние ориентиры, положение которых в пространстве известно с высокой точностью.
Датчики угловых скоростей, инерциальные датчики и датчики «памяти «используют технику скоростных и позиционных гироскопов. Гироскопы являются структурным элементом инерциальной навигационной системы, обрабатывающей информацию о местонахождении объекта с целью определения его ориентации в пространстве.
До сих пор применялись в основном механические гироскопы, работающие на основе эффекта удержания оси вращения тела в одном направлении инерциального пространства. Это дорогостоящие приборы, поскольку требуется высокая точность формы тела вращения и минимальное возможное трение подшипников. В последнее время были созданы оптические гироскопы которые имеют структуру статического типа и обладают рядом достоинств по сравнению с механическими, а именно: отсутствие подвижных деталей и, следовательно, устойчивость к ускорениюпростота конструкциикороткое время запускавысокая чувствительностьвысокая линейность характеристикнизкая потребляемая мощностьвысокая надежность.
Точность гироскопов (различных типов) характеризуется ошибками в пределах 1.0.01 град.- дрейф нуля 1.0.01 град/часмасса — 2−30 кг, потребление — несколько ватт- [1].
Присущие гироскопическим приборам дрейфы приводят к накоплению ошибок, что вызывает необходимость применения других средств (датчиков внешней информации) для их коррекции. Но еще более существенно то, что инерциальные датчики ориентации могут измерять не более двух (а обычно только одну) из трех угловых координат, и то лишь при условии что третья измеряется датчиком внешней информации. (эта особенность инерциальных датчиков рассмотрена в [1]). Последнее является существенным ограничением при построении инерциальных систем контроля ориентации. Таким образом, в отличие от датчиков внешней ориентации, которые могут работать независимо один от другого, инерциальные датчики ориентации в принципе не могут работать, не опираясь на данные, полученные с датчиков внешней информации. Следовательно, датчики внешней информации выступают и как самостоятельные, автономные измерители углов ориентации, и как неотъемлемая часть комплексированной измерительной системы.
Позиционные датчики внешней информации по способу получения ими информации можно разделить на пассивные и активные. Пассивные датчики используют различные поля и явления естественного происхождения, а активные — специально созданные навигационные поля.
Среди пассивных датчиков можно выделить оптические, ионные, гравитационные, магнитные. Наиболее обширную группу составляют оптические датчики. Среди них, в свою очередь, можно выделить звездные, солнечные и планетные.
Звездные и солнечные датчики позволяют определить угловое положение светил в связанной системе координат. Малые угловые размеры ориентиров (звезд) обусловливают при благоприятных условиях высокую инструментальную точность звездных датчиков — порядка единиц и долей угловых секунд (в зависимости от размеров объектива телескопа). Здесь имеется в виду погрешность определения углов в инструментальной системе координат, связанной с оптической осью телескопа. Погрешности привязки инструментальной системы координат к связанной системе приводят к увеличению погрешностей на порядок. Ограниченность поля зрения телескопа и углов его разворота (в следящем варианте) вызывает необходимость частой смены ориентиров при орбитальном полете, что усложняет систему контроля ориентации в целом и приводит к потере информации в течение десятков секунд при переходе с одного ориентира (звезды) на другой.
Для полнопараметрического контроля ориентации необходимо одновременно фиксировать направление не менее чем на две звезды или использовать дополнительно к телескопу еще какой-либо датчик. Часто в комбинации с астродатчиком используется солнечный датчик. Такая система, обладая свойством полнопараметричности, не отвечает требованиям глобальности, так как время видимости Солнца ограничено.
Указанные недостатки, наряду со сложностью, дороговизной, значительными массогабаритными характеристиками подобных систем, приводят к ограничениям при использовании подобных систем.
В то же время солнечные датчики сами по себе широко используются в качестве датчиков ориентации. Это связано с тем, что из небесных светил, используемых в качестве источника информации об угловом положении, Солнце является наиболее удобным, так как, во-первых, оно обладает наиболее мощным излучением световой энергии в пределах солнечной системы, а во-вторых, вследствие значительного удаления от Земли имеет сравнительно небольшие угловые размеры. Все это позволяет при разработке датчиков ориентации по Солнцу использовать простые устройства.
По своей конструкции солнечные датчики делятся на грубые и точные. Грубые имеют большое поле зрения (порядка 20° и более) и точность на уровне единиц градусов. Точные датчики имеют небольшое поле зрения (порядка нескольких градусов) и при соответствующей калибровке могут обеспечивать точность в несколько десятков угловых секунд.
Кроме астродатчиков для измерения параметров ориентации объекта используют радиопостроители местной вертикали. Радиовертикали позволяют определить ориентацию летательного аппарата относительно подстилающей поверхности. Наиболее эффективным методом построения местной вертикали является разностно-дальномерный метод, который заключается в том, что летательный аппарат облучает подстилающую поверхность несколькими лучами. По отраженному сигналу для каждого луча определяют дальность до подстилающей поверхности. Разность дальностей характеризует положение летательного аппарата относительно подстилающей поверхности. Точность разностно-дальномерного метода в значительной степени зависит от рельефа подстилающей поверхности.
Для измерения параметров ориентации так же используют оптические датчики. Самым распространенным оптическим прибором — датчиком ориентации — является инфракрасный построитель местной вертикали. Угловое положение местной вертикали, полученное в результате измерений в связанной системе координат, дает информацию о двух из трех углов ориентации (тангажа и крена). В [2] можно подробнее познакомиться с характеристиками различных датчиков. Точность ИК-датчиков горизонта (различных их типов) характеризуется ошибками в пределах 0,05.0,3°- массогабаритные характеристики: масса — 1,5−6 кг, объем -1,5.4 дмЗ, потребление — единицы ватт.
Прослеживается перспектива уменьшения массы и габаритов за счет применения прогрессивных технических и технологических решений. Повышение точностных характеристик возможно на основе уточнения физической модели ИК-излучения Земли, совершенствования методов обработки сигналов и комплексирования измерителей различной физической природы.
Следует отметить, что ИК-построитель местной вертикали наилучшим образом отвечает требованиям непрерывности и глобальности контроля ориентации.
Применение спутниковой навигационной аппаратуры для определения ориентации объекта.
В последнее десятилетие были развернуты и получили широкое распространение спутниковые радионавигационные системы второго поколения GPS и Глонасс. Эти системы позволяют определять местоположение, скорость, а так же ориентацию объектов в реальном масштабе времени [16], [33].
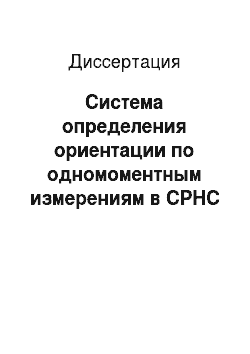
Для определения ориентации объекта, на нем устанавливают несколько (3−4) антенн, которые одновременно принимают сигналы от нескольких спутников рис. 1. Приемник измеряет параметры принятых сигналов: псевдодальность и псевдодоплеровскую фазу, и передает их для дальнейшей совместной обработки в процессор. Фазовые центры антенн образуют Р = L — 1 базовых вектора, где L — количество антенн. Проекции xbfs ' ybfs' zbfs ' р = р > всех базовых векторов на оси системы координат BFS (Body Fixed System), связанной с объектом, находятся заранее путем юстировки с помощью обычных (не спутниковых) измерительных средств. Ориентацию объекта определяют относительно местной (локальной) системы координат LLS (Local Level System), начало которой совпадает с началом системы BFS, а направление осей определяется плоскостью местного горизонта и местной вертикалью.
Рис 1. Расположение спутниковых антенн на объекте.
Обзор литературы. Опубликовано значительное число работ, посвященных задачам определения пространственной ориентации с помощью аппаратуры спутниковых радионавигационных систем [4, 5, 6, 7,.
8, 9,13, 26, 27,28, 29, 30]. Из обзора публикаций можно выделить несколько основных подходов к решению поставленной задачи.
Все методы определения ориентации можно разделить на два класса: определение ориентации по предварительно найденным базовым векторам и непосредственное определение углов ориентации. Первый класс решений достаточно хорошо развит и включает три метода определения ориентации: а.
1. В первом методе находят оценку матрицы поворота Т, а затем, по нелинейным формулам, вычисляют углы курса, тангажа и крена.
Для первого метода [4, 5] предполагается наличие не менее Зх базовых линий (не менее 4 антенн), которые не лежат в одной плоскости. При этом решение разбивают на три этапа. На первом этапе с помощью обычных (не спутниковых) измерительных средств находят проекции всех базовых векторов урВр5, р = 1, Р, на оси объектовой системы координат ВРБ. На втором этапе по псевдодальномерным и псевдофазовым измерениям отдельно для каждого базового вектора разрешают неоднозначность и определяются его проекции х[Ь8, уРц5, Р = Р на оси локальной системы координат 1X8. Такая задача очень близка к линейной и решается с помощью хорошо развитых для линейных систем методов [10, 11, 14, 15]. Затем формируют две матрицы и ХВР5, размерности 3×1, столбцы которых образуются проекциями базовых векторов на оси систем 1X8 и ВР8 соответственно. На третьем этапе осуществляется вычисление оценки матицы Тматрицы перехода из ВБ8 в 1X8. Марицы Х££5 и связаны соотношением:
Хця = Т • (1).
Откуда для избыточного случая (J > 3) получаем оценку матрицы л Т.
Т = • XgFS • (xBFS — XgFS) (2) а, и далее, используя часть элементов матрицы Т, по нелинейным формулам осуществляется вычисление углов курса, тангажа и крена (углов Эйлера).
Данный подход был реализован при создании спутниковой навигационной аппаратуры с угломерным каналом фирмы Trimble.
В литературе [13] приведены результаты исследования точности определения углов ориентации таких приемников.
Точность определения углов ориентации зависит как от точности измерений псевдофаз, так и от внешних факторов: уровня многолучевости, длин базовых линий, количества видимых спутников и их геометрического фактора, поэтому приводят данные для нескольких, наиболее типичных случаев.
Обычно предполагают что многолучевости нет или ее влияние на точность измерения фазы сигнала мало, длина базовых линий составляет около 1 м., в зоне видимости системы ориентации находится 6 спутников. При этих условиях точность определения углов ориентации составляет порядка 5 ч-10 угловых минут (СКО).
Приведенные характеристики удовлетворяют требованиям для высокоточного определения пространственной ориентации различных объектов.
Основным достоинством первой модификации определения ориентации состоит в ее простоте. Все вычисления (в том числе и процедура разрешения неоднозначности), за исключением третьего этапа, являются линейными. Однако этому методу присущ и значительный недостаток, который состоит в том, что при разрешении неоднозначности не используется вся избыточность измерений. Разрешение осуществляется независимо по каждой базовой линии, что значительно снижает вероятность правильного разрешения неоднозначности по одномоментным измерениям. Как показывает практика, достаточно надежное разрешение неоднозначности одномоментных измерений достигается при использовании однодиапазонных измерений по двум системам (ОРБ+ГЛОНАСС) при наличии не менее чем 12 спутников, что в настоящее время практически не встречается. Поэтому системы построенные по этому принципу требуют значительного времени инициализации для разрешения фазовой неоднозначности и используются для статических или слабо динамических объектов.
Для того, что бы повысить вероятность правильного разрешения во многих случаях используют априорную информацию об известных длинах базовых векторов или информацию об углах между ними. Длины базовых векторов или их взаимную конфигурацию (углы между ними) получают в результате юстировки с помощью обычных измерительных средств на первом этапе.
2. Для второго метода определения ориентации [6] можно использовать 2 базовых вектора (3 антенны), что является их минимальным числом. При этом решение задачи так же разбивается на три этапа. На первом этапе вычисления первой и второй модификаций совпадают, т. е. по кодовым и псевдофазовым измерениям отдельно для каждого базового вектора определяются его проекции на оси гринвичской системы координат. Затем путем пересчета определяются проекции х1£3, урш, гр118 р = 1, Р этих базовых векторов на оси системы координат 1X8. На втором этапе для каждой пары базовых векторов с номерами р >к к .к и грР ГШ р р р г хш Уш 2ш и гш — хш Уш 2ш Г вычисляется их векторное произведение грь5 х гк18. В результате каждая пара базовых векторов порождает тройку векторов, из которых образуют матрицу гк15 г[1Б х гк18 ].
Для каждой такой матрицы справедливо равенство аналогичное (1).
— р — к —р ->к Iгр рк I -*р ->к -*к I ш гш гш х гш ] ~ 1 Тш гврб Х ГВРЯ V-5- где fgps Гдр8 X Гвр5 ] - матрица в системе ВБЗ, соответствующая по номерам р и к матрице г[18 х гк18 ] и вычисленная заранееТрк — матрица преобразования координат соответствующая номерам р и к.
Из (3) вытекает очевидный способ вычисления оценки матрицы гр рк г^рк.
-*к -~р — а I -~р — а: ->¦ р — а Гш гш гш х гш у Tbfs х.
4) г.
Для случая двух базовых линий (трех антенн) матрица Трк будет единственной. Если число базовых линий больше, то предлагается усреднить все возможные матрицы Трк между собою [6]. На третьем этапе вычисления первого и второго подходов так же совпадают.
Данный подход был реализован при создании спутниковой навигационной аппаратуры с угломерным каналом фирмы АвМесЬ.
В литературе [6, 28] приведены результаты исследования точности определения углов ориентации таких приемников.
При отсутствии многолучевости, 6−7 видимых спутниках, 2−3 метровых базовых линиях, точность измерения углов ориентации составляет порядка 3.5 угловых минуты (СКО). Однако многолучевость может ухудшать точность оценок углов ориентации до 3 и более раз.
В [28] приведено сравнение результатов определения углов ориентации корабля с помощью спутниковой системы фирмы Ав^есЬ и штатной гироскопической системы. Разность показаний спутниковой и гироскопической системы, после калибровки последней, не превышает 3 угловых минут.
Как видно, во втором подходе определение ориентации становится возможным при использовании трех антенн. Это означает, что при втором подходе учитывается избыточность элементов матрицы преобразования координат. Однако при втором подходе, так же как и при первом не проверяется обладает ли получаемая в результате вычислений оценка Трк (4) либо ее усредненный вариант свойствами матрицы преобразования координат. Естественно, что это вносит в решение ошибки. При втором подходе, так же как и при первом, разрешение неоднозначности псевдофазовых измерений производится по каждому базовому вектору независимо. Следовательно, вероятности правильного разрешения неоднозначности первого и второго подходов будут одинаковы. Следует отметить, что в рамках второго подхода в [6] предлагается некоторая дополнительная корректировка векторов г[18 р = 1, Р, такая что скорректированные вектора имеют длины, определенные при юстировке. Кроме того, в результате корректировки углы между векторами становятся равными углам, найденным при юстировке. Такая корректировка уточняет оценку ориентации, однако она никак не влияет на надежность разрешения неоднозначности. а.
3. В третьем методе [8] так же ищут оценку матрицы поворота Т. А.
Однако, в отличии от первого метода, на матрицу поворота Т накладывают дополнительное условие ее ортогональности. Затем, по нелинейным формулам, вычисляют углы курса, тангажа и крена.
Для третьего метода задачу определения углов ориентации можно представить как последовательность шагов. На первом шаге с помощью обычных (не спутниковых) измерительных средств находят проекции всех базовых векторов р = l, P, на оси объектовой системы координат BFS. На втором шаге по псевдодальномерным и псевдофазовым измерениям отдельно для каждого базового вектора разрешают неоднозначность и определяют проекции базовых векторов на оси гринвичской системы координат (ECEF — Earth Centered Earth Fixed).
1, 16, 32, 38] xpECEF, ypECEF, zpECEF, p =, P, а при разрешении учитывается известная длина базовых векторов.
Затем формируют две матрицы XECEF и размерности 3xJ, столбцы которых образуются проекциями базовых векторов на оси систем ECEF и BFS соответственно.
Наиболее простой способ вычисления матрицы поворота, а 1 а.
Т = XECEFXBFS не гарантирует что Т — ортогональная матрица из-за того что шумы измерений искажают оценку матрицы XECEF, поэтому используют другой алгоритм:
Находят матрицу X ECEF, которая является ближайшей к матрице X ECEF (мера близости матриц X ECEF и XECEF характеризуется нормой.
Фробениуса, которая описана ниже), но имеет такое же скалярное произведение колонок как скалярное произведение колонок матрицы X в/75. Одинаковое скалярное произведение колонок X ЕСЕР и X ВРЗ гарантирует неизменность длин базовых векторов и углов между ними. При этом матрица поворота (5).
Т = Х.
ЕСЕР ' ^Вга.
— 1.
5) будет ортогональной.
Для задания величины, характеризующей меру близости матрицы X ЕСЕР к X ЕСЕР используют норму Фробениуса.
6) где 1 т ()-след матрицы.
В результате ищут такую матрицу X ЕСЕЕ, которая минимизирует след Фробениуса (7).
XЕСЕР ^ЕСЕР.
Ш1П.
7) при условии есер есер
ВРБ '^ВРЯ.
8).
Найдя ХЕСЕЕ вычисляют ортогональную матрицу поворота Т (5), а далее по нелинейным формулам осуществляется вычисление углов курса, тангажа и крена.
Достоинством предложенного в [8] метода является то, что при разрешении учитываются длины базовых линий. При этом вероятность правильного разрешения значительно увеличивается. Однако дополнительная информация об углах между базовыми линиями на этапе разрешения не учитывается.
Кроме этого дополнительное условие ортогональности матрицы поворота должно приводить к более точной оценке углов ориентации по сравнению с первым методом.
Второй класс подходов определения ориентации включает методы непосредственной оценки углов ориентации. Идея третьего подхода к решению задачи ориентации предлагается в [6, 7]. Она состоит в том чтобы отказаться от оценки матрицы преобразования координат и перейти непосредственно к оценке углов Эйлера. Оценка матрицы преобразования координат в этом случае может быть вычислена через углы Эйлера. Такая оценка будет обладать всеми свойствами матрицы преобразования координат. Представляется, что уменьшение количества оцениваемых параметров с девяти (количество элементов матрицы преобразования координат) до трех (курс, тангаж, крен) позволит значительно повысить и надежность правильного разрешения неоднозначности. Как уже отмечалось, достаточно надежное разрешение неоднозначности одномоментных измерений независимо по каждому базовому вектору достигается при наличии не менее чем 12 одномоментных измерений псевдофаз. При этом для каждого базового вектора оцениваются три его компоненты. Во втором методе требуется оценить так же три параметра (три угла Эйлера).
Количество измерений псевдофаз для однодиапазонного приемника очевидно равно Рх1, где I — число отслеживаемых одновременно всеми антеннами спутников. Для односистемного приемника, работающего только по одной системе ГЛОНАСС либо вРБ, обычно I > 5−6. Следовательно количество измерений псевдофаз для минимально возможного числа баз Р=2 (три антенны) будет не менее 10−12. Если предположить что Р=3 (четыре антенны), то количество измерений псевдофаз будет не менее 15−18. Эти оценки показывают, что в задаче определения ориентации объекта при использовании однодиапазонного и односистемного приемника достижимо достаточно надежное разрешение неоднозначности одномоментных измерений. Однако как справедливо отмечается в [6], параметризация через углы Эйлера приводит к задаче разрешения неоднозначности в нелинейной постановке, для решения которой в настоящее время отсутствуют эффективные вычислительные процедуры. Возможно по этой причине параметризация через углы Эйлера в [6] применяется только после раздельного разрешения неоднозначности по каждой базовой линии. Это приводит к той же вероятности правильного разрешения неоднозначности, что и при использовании первого подхода.
Параметризация через углы Эйлера обладает неприятным свойством. При тангаже близком к ±-я/2 курс и крен плохо разделяются [24] и как следствие оцениваются с очень низкой точностью. Поэтому в некоторых задачах вместо углов Эйлера используется кватернион вращения, не обладающая вышеотмеченным недостатком. Кватернион вращения является математическим объектом, определяемым четырьмя независимыми параметрами. Увеличение числа оцениваемых параметров с трех до четырех, которое возникает при использовании кватерниона, компенсируется ограничением на элементы кватерниона вращения, сумма квадратов которых должна быть равна 1.
Подобный подход приведен в [7]. В статье определяется оценка кватерниона вращения по критерию минимума взвешенного квадрата невязок первых разностей псевдофаз.
В статье приведена итерационная процедура, которая позволяет найти оценку кватерниона вращения, а из найденной оценки, по нелинейным формулам, находят оценки углов ориентации.
Для определения кватерниона вращения в [7] записывают выражение для направляющих косинусов в объектовой системе координат: В со$(ссл вр8) = а] вр8 • б • 8 г. есер + = (рп — л! ъ] + л.
9) где 1 = 1,2 — номер базы- [ - порядковый номер спутникаа у вр5 — орты объектовой системы координат;
Б — матрица поворота, характеризующая ориентацию системыесеб «проекция базового вектора на линию, соединяющую спутник и приемную антенну;
— шум измеренийр^ - разность фаз между базовой и удаленной антеннами с учетом неоднозначности;
Я — длина волны;
Ь^- длина] ой базовой линии;
Из (9) можно выразить шум измерений.
ВРБ авББ ' ® * ЕСЕР.
10) тогда весовую функцию, представляющую взвешенный квадрат невязок первых разностей псевдофаз запишем в виде: я т 2.
Ф (ч)]=!/>/•? В л ВБв.
ВКгЩФ’в/ЕСЕР У.
П) т. е. нужно подобрать такую матрицу поворота которая будет минимизировать весовую функцию (11). В [7] приведена итерационная процедура, которая позволяет найти минимум весовой функции (11). Точность найденных оценок составляет порядка 10 угловых минут. Однако условия их определения (длины базовых линий и уровень многолучевости) в статье не оговариваются.
К сожалению, в статье не рассмотрен вопрос разрешения неоднозначности. В статье [7] приведены ссылки на алгоритмы разрешения фазовой неоднозначности. Далее считается что фазы однозначны и предложен метод обработки однозначных измерений.
Однако известные алгоритмы не позволяют получить высокую вероятность разрешения по одномоментным измерениям без значительной избыточности. Кроме этого в случае кватернионной параметризации задача разрешения неоднозначности становится сильно нелинейной и возникают значительные сложности с процессом сходимости и алгоритмом разрешения.
Кроме рассмотренных выше методов имеется еще одна интересная работа на которую следует обратить внимание [31]. В этой статье рассмотрены методы оптимальной фильтрации пространственной ориентации объекта на основе обработки измерений псевдодальностей и псевдофаз с возможным комплексированием аппаратуры СРНС с инерциальной системой. В статье рассматриваются вопросы фильтрации в условиях нелинейных связей неоднозначных измерений с вектором оцениваемых параметров. К сожалению, в статье не рассматриваются методы оценки ориентации объекта при параметризации по углам Эйлера, а так же отсутствуют результаты моделирования этих алгоритмов.
Кроме этого в процессе моделирования алгоритмов определения ориентации автор получает малую вероятность правильного разрешения неоднозначности по одномоментным измерениям 4−6 спутников. Поэтому для достижения малой вероятности неправильного разрешения используется фильтрация оценок во времени. В результате алгоритм оценки параметров ориентации не работает по одномоментным измерениям.
В статье [31] рассмотрены только результаты моделирования и отсутствуют результаты тестирования предложенных алгоритмов по реальным сигналам. Как показано в диссертационной работе, характеристики алгоритмов, полученные на модели, ухудшаются в несколько раз при работе по реальным сигналам. Это происходит из-за того что шумы в реальных сигналах значительно отличаются от нормальных.
Из обзора литературы следует, что в настоящее время не разработан эффективный, с вычислительной точки зрения, алгоритм, который бы позволял непосредственно определять ориентацию (углы Эйлера) по одномоментным однодиапазонным измерениям. Основная сложность заключается в разрешении неоднозначности при нелинейной зависимости ориентации от измерений псевдодальности и псевдофазы.
Поиск и оценка характеристик алгоритма определения ориентации в нелинейных условиях и разрешения неоднозначности по одномоментным измерениям однодиапазонного ОРБ&ОЬпазз приемника при малом числе видимых спутников являются объектом исследований, которому посвящена эта работа.
Цель и задачи работы.
Цель диссертационной работы заключается в разработке системы высокоточного определения ориентации объекта, построенной на основе сравнительно дешевых и доступных навигационных приемников ОРБХГЛОНАСС принимающих сигналы только в одном частотном диапазоне Ы (по принятой терминологии такие приемники называются однодиапазонными). Разрабатываемая система должна обеспечивать определение ориентации на каждый момент времени (эпоху) при наличии в зоне видимости небольшого количества спутников (4−5).
Для достижения этих целей в работе решаются следующие задачи:
1. Исследуются возможности применения кватернионной параметризации для достижения поставленной цели.
2. Разрабатываются алгоритмы разрешения фазовой неоднозначности при условии сильной нелинейной зависимости измеряемых параметров от параметров, характеризующих ориентацию объекта.
3. Анализируются характеристики процесса сходимости оценок в рассматриваемом итерационном алгоритме.
4. Формулируются требования к размещению антенн на объекте, ориентацию которого требуется определять, таким образом, что бы ошибки определения углов ориентации были минимальны.
5. Разрабатываются рекомендации на построение аппаратного обеспечения приемника.
6. Разрабатываются методики тестирования алгоритмов ориентации объекта по измерениям псевдодоплеровских фаз.
Объект исследования.
Объектом исследовании предлагаемой диссертационной работы является устройство, состоящее из 4 навигационных ОРБ/ГЛОНАСС приемников, предназначенное для определения ориентации по измерениям псевдодальностей и псевдодальномерных фаз.
Предмет исследования.
Предметом исследования предлагаемой диссертационной работы является метод определения ориентации объекта по однодиапазонным измерениям, который бы обеспечивал одномоментное определение ориентации с малой аномальной ошибкой при 4−6 видимых спутниках.
Методы исследования.
Методы исследования, служившие инструментом для добывания фактического материала диссертации, базировались на аппарате математического анализа, цифровой обработки сигналов и математической статистики.
Научная новизна работы.
Научная новизна диссертационного исследования заключается в том, что впервые предложен метод решения задачи наименьших квадратов при неоднозначных измерениях и проведено исследование характеристик предложенного метода.
Теоретическая значимость.
Теоретическая значимость диссертации заключена в том, что её результаты позволяют:
1. Развивать алгоритмы определения ориентации объектов по измерениям псевдодальностей и псевдофаз спутниковых радионавигационных систем.
2. Совершенствовать алгоритмы разрешения фазовой неоднозначности при нелинейной зависимости измерений от параметров ориентации.
Практическая иениость результатов работы.
Практическая ценность диссертации состоит в том, что её результаты применены при разработке перспективных навигационных приёмников, предназначенных для определения ориентации. Предложенные в диссертации алгоритмы внедрены и опробованы при проектировании в НИИКП программного обеспечения для высокоточного определения ориентации различных объектов по сигналам, полученным от навигационных спутников GPS.
Реализация иаучно-технических результатов работы.
Результаты диссертационной работы были использованы в НИОКР Федерального государственного унитарного предприятия НИИ КП и внедрены при создании реальной спутниковой аппаратуры определения ориентации подвижных объектов.
Публикации и апробации.
Основные результаты диссертации изложены в [35], [36], [37] и апробированы при обработке реальных измерений спутниковых радионавигационных систем, а так же на научно-технических семинарах кафедры «Радиосистемы передачи информации и управления» МАИ и НИИ PJIМГТУ им. Н. Э. Баумана.
Положения, выносимые на защиту:
1. Непосредственная оценка параметров ориентации по измерениям псевдодальностей и псевдофаз в высокоточных системах определения ориентации подвижных объектов позволяет значительно уменьшить вероятность аномальной ошибки (2%), сократить время начальной инициализации (до 1 эпохи) при оценке параметров ориентации по одномоментным измерениям при малом (4.6) числе видимых спутников.
2 Предложенная система позволяет определять параметры ориентации на каждый момент времени (эпоху) с высокой точностью (СКО менее 5 угловых минут) с использованием простых и дешевых однодиапазонных (Ь1) навигационных приемников;
3 Разработанный итерационный алгоритм решения нелинейной задачи наименьших квадратов при неоднозначных измерениях позволяет преодолеть нелинейность параметров ориентации от измерений и существенно расширить область сходимости (+/- 60 градусов);
Структура диссертации.
Диссертационная работа изложена на 154 листах машинописного текста, включая 24 листов иллюстраций и графиков. Диссертационная работа состоит из:
• введения, в котором приведен обзор различных систем определения ориентации и рассмотрены их достоинства и недостатки;
• первой главы, в которой приведены математические модели исходных измерений псевдодальностей и псевдофаз и их зависимости с параметрами ориентации, а так же рассмотрены вопросы построения аппаратной части системы определения ориентации,;
• Второй, третей и четвертой глав. В этих главах предложен алгоритм поиска по направлению для оценки элементов ориентации и приведены результаты моделирования и тестирования этого алгоритма;
• Пятой и шестой глав. В этой части приведен алгоритм модового поиска оценки элементов ориентации и приведены результаты тестирования предложенного метода по модели;
• 9 приложений. В приложениях приведены математические выкладки и пояснения для предыдущих частей диссертации;
• Заключения. В заключительной части подводятся итоги и оцениваются результаты проведённых исследований по отношению к общей цели и конкретным задачам диссертационной работы;
• Списка литературы, которой включает 41 наименование;
1. Модели наблюдений на основе первых и вторых разностей псевдодальностей и псевдофаз.
5.4 Выводы по главе 5.
1. Тестирование системы определения пространственной ориентации подвижных объектов показало, что она обеспечивает высокоточное определение ориентации объекта по одномоментным, однодиапазонным измерениям. При размерах баз между фазовыми центрами антенн порядка единиц метров, точность определения пространственной ориентации (углов ориентации курса, крена и тангажа) составляет менее 8 угловых минут.
2. Значительным недостатком разработанного программного обеспечения является узкая область сходимости, которая составляет 5−8 градусов. Для расширения области сходимости ПО последовательно перебирает все возможные 6 градусные области и в каждой зоне пытается найти глобальный минимум нелинейного функционала. Перебор во всей зоне (+/- 360 ° занимает 100 -120 минут).
3. В том случае, если грубо известно значение углов ориентации, то поиск оценок по курсу, крену и тангажу может занимать гораздо меньше времени. Например, поиск оценок углов ориентации по курсу, крену и тангажу в зоне +/- 45 градусов занимает около 25 секунд.
6. Итерационный алгоритм модового поиска.
В третьей главе был предложен алгоритм поиска по направлению для оценки элементов кватерниона. Натурный эксперимент показал что алгоритм обеспечивает высокую точность определения ориентации и малую вероятность аномальной ошибки, однако существенным недостатком этого алгоритма является узкая область сходимости (сходимость достигается в +/-5 4- +/- 8 градусной зоне относительно истинного значения).
Узкая область сходимости алгоритма поиска по направлению объясняется прежде всего тем, что точка начального приближения лежит далеко от оценки глобального минимума линеаризованной функции невязок у (ц). В следствии этого поведение и у (ц) в области (1Пп сильно различаются и поэтому информация о движении в направлении с^Пп является сильно искаженной Рис. 6.
В результате возникла необходимость разработать новый алгоритм оценки элементов кватерниона, который бы обеспечивал значительно большую область сходимости. Такой алгоритм получил название алгоритм модового поиска.
6.1 Алгоритм модового поиска.
Будем осуществлять поиск минимума линеаризованной функции невязок у^), ограничивая область поиска некоторым размером Л, таким что в этой области расхождение функций невязок и (<) и не было значительным. Для наглядного пояснения работы алгоритма модового поиска приведен Рис. 19. На нем показаны нелинейная функция невязок и (ц) (синим цветом) и линейная функция невязок у^) (оранжевым цветом) от двух элементов кватерниона Ц! и я2. w (ql5q2).
Рис. 19.
Зададим грубое начальное приближение q^. В обычных задачах поиска единственного минимума значение q^ можно задавать произвольно. В алгоритме модового поиска, грубое начальное приближение должно совпадать с положением минимума одной из мод нелинейной функции потерь w (q) (41). На рисунке эта точка обозначена буквой А. Сравнение значения минимума этой моды с минимумами других мод, отыскиваемых на каждом шаге итерации, позволяет двигаться в направлении моды с наименьшим минимумом. Поэтому перед началом процесса поиска необходимо найти положение минимума той моды нелинейной функции потерь w (q) (41), к которой принадлежит начальное приближение qo. Алгоритм решения этой задачи описан в приложениях 7 и 8.
Положим, что применяя алгоритмы, описанные в приложениях 7 и 8, мы нашли целочисленный вектор к0, определяющий моду функции потерь и^) (41), в области которой лежит начальное приближение положение ц1т[) минимума этой моды и величину самого минимума и (я'то) — Далее для представления формул в общем виде вместо к0 и я1ш0 будем использовать обозначения к5 и, полагая пока что б=0. В области, определяемой размером & можно с помощью процедуры минимизации квадратичной формы ¿-/(к) (53), найти несколько последовательно убывающих минимумов линеаризированной функции невязок у (д) и рассортировать их в обратном порядке удаления от точки линеаризации на очередном шаге. На рисунке локальные минимумы линеаризированной функции невязок обозначены буквами С и Е. Далее полагая что каждая точка из списка лежит близко к соответствующему минимуму необходимо спуститься из точек минимума у (я) в рядом лежащие минимумы и{(). На рисунке они обозначены буквами В и Б. После этого необходимо среди найденных таким образом минимумов найти наименьший (точка В) и использовать его в качестве точки линеаризации на следующей итерации.
Задача поиска глобального минимума и заданного количества последовательно нарастающих мод линеаризованной функции невязок у (я) приводятся в литературе [11]. Однако нам надо найти минимум наименьшей моды нелинейной функции потерь и (<) (41), который совпадает с у (ц) только в точке линеаризации. По мере удаления от я1т5 функции потерь и у^) начинают расходиться. Отсюда следует, что необходимо выделить список минимумов мод линейной функции потерь у (я), последовательно удаляющихся от точки линеаризации, и таких, что значение самих минимумов в списке последовательно убывает. Просматривая затем последовательно минимумы v (q) из списка, можно будет найти минимум w (q) меньший чем M (qlms) в окрестности точки линеаризации qlm5.
Удаление произвольного минимума v (q), расположенного в точке Ч к lin «от точки линеаризации qlms может быть записано с помощью выражения: lk, imqlm*Пч, ишч1п"Л.
65).
Заключение
.
В диссертационной работе в соответствии с поставленной целью и задачами:
1. Предложен алгоритм поиска по направлению оценки ориентации объекта по одномоментным, однодиапазонным псевдодальномерным и псевдофазовым измерениям, в котором вместо традиционных углов Эйлера используются элементы кватерниона вращения. Использование элементов кватерниона уменьшает степень нелинейности связей измерений с параметрами, задающими ориентацию. В алгоритме поиска по направлению реализован Ньютоновский итерационный процесс, в котором вектор приращения оценки кватерниона на каждой итерации направлен в сторону глобального минимума линеаризованной функции невязок, а его величина зависит от величины невязок. Чем больше невязки, тем меньше величина шага. На каждом шаге итерационного процесса осуществляется разрешение неоднозначности.
Результаты статистической обработки, полученные по результатам испытаний, свидетельствуют о высокой точности системы, а так же о высокой надежности (малой вероятности аномальной ошибки). При размерах баз между фазовыми центрами антенн порядка 2 -г- 3 метров, точность определения пространственной ориентации (углов ориентации курса, крена и тангажа) по одномоментным измерениям однодиапазонных приемников составляет 5 ч- 10 угловых минут. При этом средняя вероятность аномальных ошибок равна 0.0238. Алгоритме поиска по направлению характеризуется областью сходимости, которая составляет -25° -г +25° градусов от истинного значения ориентации. В том случае, если начальная точка лежит в этом диапазоне, и при отсутствии значительной многолучевости, алгоритм сходится к истинному значению.
Недостатком алгоритма поиска по направлению при работе по реальным сигналам при наличии ошибок многолучевости является сужение области сходимости (точка начального приближения может отстоять от истинного значения на 6 — 8 градусов).
Алгоритм поиска по направлению можно рекомендовать только в том случае если имеются априорные сведения об оценке ориентации (например в случае комплексирования с инерциальной системой). В противном случае алгоритм последовательно перебирает все возможные области, совпадающие по размерам с областью ходимости. Однако такой перебор занимает несколько десятков минут.
2. Для увеличения области сходимости был разработан новый итерационный алгоритм оценки ориентации объекта — алгоритм модового поиска.
Алгоритм модового поиска существенно отличается от описанного выше линеаризованного алгоритма. В нем на каждом шаге итерации осуществляется переходим от минимума одной моды функции к минимуму другой меньшей моды этой функции.
Тестирование системы ориентации, построенной на основе алгоритма модового поиска показало, что точность и надежность системы не ухудшились по сравнению с алгоритмом поиска по направлению. Однако область сходимости итерационного процесса значительно расширилась и составляет -60° -5- +60° градусов от истинного значения ориентации.
3. При построении реальной аппаратуры, вся зона возможных значений углов ориентации разбивается на области совпадающие по размерам с областью сходимости и итерационный процесс запускается для каждой области до тех пор, пока алгоритм не сойдется. Результаты моделирования такой процедуры показывают что алгоритм сходится к истинному значению менее чем за 1 секунду. В результате нет необходимости комплексировать навигационную аппаратуру определения ориентации с инерциальной системой. 4. Предложены варианты аппаратного построения системы определения ориентации объекта. В работе показано, что для построения системы ориентации при использовании GPS и GLONASS целесообразно использовать общую коммутируемую радиочастотную часть и общий задающий генератор для синхронизации моментов измерений.
Подводя итоги проделанной работы, можно заключить, что полученные теоретические основы позволили создать аппаратуру, предназначенную для высокоточного определения ориентации объекта по одномоментным измерениям однодиапазонного навигационного приемника по 4−6 видимым спутникам.
Дальнейшие исследования для совершенствования систем определения пространственной ориентации объекта стоит вести в направлении, которое позволит расширить область сходимости алгоритма непосредственной оценки углов ориентации (или кватернионов) при условии сильной нелинейной зависимости ориентации от измерений псевдодальности и псевдофазы. В качестве второго важного направления исследований можно назвать поиск метода, который позволит уменьшить влияние многолучевости на точность и надежность алгоритма непосредственной оценки углов ориентации (или кватернионов).
Список литературы
- Раушенбах Б.В., Токарь Е. П. Управление ориентацией космических аппаратов. М.: Наука, 1974.
- Kleusberg. Mathematics of Attitude Determination with GPS. GPS WORLD, September, 1995, p. 72.
- F. Van Graas, M. S. Braasch. GPS Interferometric Attitude and Heading Determination: Initial Flight Test Results. Navigation: Journal of the Ins titute of Navigation: 38(4), p. 279−316. Winter 1991−1992.
- A. Nadler, I.Y. Bar-Itzhack. An Efficient Algoritm For Attitude Determination Using GPS. ION GPS-98, p. 1783−1789.
- Lev Rapoport, Ivan Barabanov, Alexander Khvalkov, Alexey Kutuzov, Javad Ashjaee. Octopus: Multi antennae GPS/GLONASS RTK System. ION GPS-2000, p. 797−804.
- Hans-Jurgen Euler, Crage Hill. Attitude determination: Exploiting all Information for Optimal Ambiguity Resolution. ION GPS-95, p. 17 511 757.
- Ю.Собцов Н. В. К задаче регресии при неоднозначных измерениях. // Радиотехника и электроника. 1978. Том 23. № 6. С. 13 031 305.
- П.Пензин К. В. Алгоритмы оперативной обработки многошкальных измерений по критерию максимального правдоподобия // Радиотехника и электроника. 1990. Том 35. № 1. С. 97−106.
- Г. Корн, Т. Корн. Справочник по математике. М., «Наука», 1984.
- Власов И.Б., Пудловский В. Б., Тарахнов С. Н. Точностные характеристики спутниковой навигационной аппаратуры с угломерным каналом. Вестник МГТУ, Сер. Приборостроение, 1997, № 1, с. 114−126.
- A. A. Povalyaev. Using Single Differences for Relative Positioning in GLONASS. ION GPS-97, p. 929−934.
- Поваляев A.A. Формирование измерений псевдофазы в приемниках спутниковых радионавигационных систем ГЛОНАСС и GPS. // Принята к печати. Будет опубликована в журнале «Радиотехника и электроника» 2002 г.
- Глобальная навигационная спутниковая система ГЛОНАСС. Интерфейсный контрольный документ (редакция четвертая). М., КНИЦ, 1998.17,3.А. Кузичева. Векторы, алгебры, пространства. М., «Знание», 1970.
- P. J. G. Teunissen, Р. J. De Jonge, С. С. Tiberius. Performance of the LAMBDA Method for Fast GPS Ambiguity Resolution // Navigation: Journal of The Institute ofNavigation. 1997. Fall. Vol. 44. № 3. P.373−383.
- Дж. Деннис. P. Шнабель. Численные методы безусловной оптимизации и решения нелинейных уравнений. М.,"МИР", 1988 г.
- Б.А. Розенфельд. Многомерные пространства. «Наука», М.1966.
- Г. Стренг. Линейная алгебра и ее применения. М. «Мир». 1980.
- Gilbert Strang, Kai Borre. Linear Algebra, Geodesy, and GPS. Wellesley-Cambridge Press. 1997.
- W. H. Press, S. A. Teukolsky, W. T. Vetterling, B. P. Flannery. Numerical Recipes in C. The art of Scientific Computing. Second Edition. Cambridge University Press, 1992.
- Мардиа К., Статистический анализ угловых наблюдений. М., «Наука», 1978.
- И.Н. Бронштейн, К. А. Семендяев, Справочник по математике. М., «Наука», 1964.
- Под редакцией Bradford W. Parkinson, James J. Spilker, Global Positioning Systems: Theory and Applications. American Institute of Aeronautics and Astronautics, 1996
- K. Ferguson, S. Gourevitch, M. Kuhl, X. Qin, Attitude Determination with the Astech Three Dimensional Direction Finding System Presented at the Sixth International Geodetic Symposium on Satellite Positionong, Columbus, Ohio, March 17−20, 1991.
- John L. Crassidis, E. Glenn Lightsey, F. Landis Markley, Efficient and Optimal Attitude Determination Using Recursive Global Positioning System Signal Operations, Journal of Guidance, Control and Dynamics, 1999.
- John L. Crassidis, E. Glenn Lightsey, F. Landis Markley, Global Positioning System Integer Ambiguity Resolution without Attitude Knowledge, Journal of Guidance, Control and Dynamics, 1999.
- А.Е. Перьков, Синтез и анализ алгоритмов определения пространственной ориентации объекта по сигналам навигационных спутников, М., Радиотехника, 2000, N 7
- Elliott D. Kaplan. Understanding GPS. Principles and Applications. Artech House, Boston, London, 1996.
- Interface Control Document: NAVSTAR GPS Space Segment / Navigation User Interfaces (ICD-GPS-200). Rockwell Int. Corp., 1987.3427. Харисов B.H., Перьков A.E. Алгоритмы фильтрации при фазовых измерениях// Радиотехника, 1997, № 7, с. 90−101.
- Поваляев Е.А. Поиск глобального минимума в нелинейной задаче наименьших квадратов при обработке неоднозначных измерений. // Принята к печати. Будет опубликована в журнале «Вычислительная математика и математическая физика» 2002.
- Поваляев Е.А. Системы спутниковой навигации Глонасс и GPS. Структура ПО навигационных приемников.
- Сетевые спутниковые радионавигационные системы/ В. С. Шебшаевич, П. П. Дмитриев, Н. В. Иванцевич и др.: Под ред. B.C. Шебшаевича. М.: Радио и связь, 1993.
- Гуткин JI.C. Теория оптимальных методов радиоприёма при флюктуационных помехах. М.: Советское радио, 1972.
- Dmitry Kozlov and Michael Tkachenko. Centimeter—Level, Real—Time Kinematic Positioning with GPS+GLONASS C/A Receivers// Navigation: Journal of The Institute of Navigation, Vol. 45, No. 2, Summer 1998.4LA.А. Поваляев, Радиотехника и электроника.