Повышение точности вращения круговых приводов подач станков с волновыми редукторами
В связи с развитием в последнее десятилетие тенденции создания технологического оборудования новых поколений блочно-модульной конструкции, в том числе, прецизионного оборудования на основе интеллектуальных мехатронных узлов и распределенных систем управления, стала актуальной задача создания прецизионных механических узлов вращательного перемещений для станкостроения, робототехники и других… Читать ещё >
Содержание
- ВВЕДЕНИЕ
- 1. 1. Мехатронные системы в станках
- 1. 2. Волновые редукторы в мехатронных системах станков
- 1. 3. Возможности применения волновых редукторов в станках
- 1. 3. 1. Компактные привода. Револьверные Головки
- 1. 3. 2. Круговые приводы подач
- 2. 1. Возможные пути решения
- 2. 2. Классическая теоретическая механика
- 2. 3. Моделирование методами теории автоматического управления
- 2. 4. Экспериментальные исследования компактных редукторов
- 3. 1. Принципы моделирования
- 3. 2. Механическая модель
- 3. 2. 1. Механическая твердотельная модель
- 3. 2. 2. Гибридная механическая модель
- 3. 2. 3. Жесткость зубчатого зацепления
- 3. 2. 4. Модель передачи между генератором волн и гибким колесом
- 3. 3. Математическая модель волнового редуктора
- 3. 3. 1. Приводное звено
- 3. 3. 2. Выходное звено
- 3. 3. 3. Неподвижное звено
- 3. 3. 4. Вспомогательные функции связей
- 3. 4. Источники колебаний в редукторах
- 3. 4. 1. Внешние крутящие моменты
- 3. 4. 2. Неточности изготовления отдельных частей редуктора
- 3. 4. 3. Колебания жесткости зубчатого зацепления
- 4. 1. Структура MATLAB® — SIMULINK®MOflenn
- 4. 2. Численное решение уравнений движения
- 4. 3. Графическое представление данных
- 4. 4. Цифровая обработка полученных данных
- 4. 5. Применение оконных функций — «windowing»
- 4. 5. 1. МАЛАВ®-программа для DFT- анализа ошибки передаточного отношения
- 5. 1. Эксцентричное положение генератора волн
- 5. 2. Отклонение формы гибкого колеса
- 5. 3. Отклонение формы жесткого колеса
- 5. 4. Влияние статистической функции жесткости зубчатого зацепления
- 6. 1. Программа практических исследований редуктора
- 6. 2. Описание испытательного стенда
- 6. 2. 1. Конструктивные особенности стенда
- 6. 2. 2. Измерительная система
- 6. 2. 2. 1. Измерение углового положения вала
- 6. 2. 2. 2. Измерение частоты вращения валов
- 6. 2. 2. 3. Измерение крутящего момента
- 6. 2. 3. Управление измерениями, обработка результатов
- 8. 1. Свойства редуктора под действием статических нагрузок
- 8. 1. 1. Определение статических характеристик
- 8. 1. 2. Диаграмма крутильной жесткости редуктора
- 8. 1. 3. Динамические характеристики
- 8. 1. 4. Критерии динамической добротности
- 8. 1. 5. Определение критериев динамической добротности редуктора
- 8. 1. 6. АФЧХ волнового редуктора
- 8. 1. 7. Измерение переходной характеристики
- 8. 2. Кинематические передаточные характеристики редуктора
- 8. 2. 1. Основные кинематические погрешности
- 8. 2. 2. Частотный анализ ошибки передаточного отношения
- 8. 2. 3. Влияние частоты вращения двигателя на амплитуду ошибки передаточного отношения
- 8. 2. 4. Детальное рассмотрение отдельных частот
- 8. 3. Измерение вибрации корпуса редуктора
- 8. 4. Энергетические характеристики редуктора
- 8. 5. Исследования влияния внешних нагружающих факторов на передаточные характеристики
- 8. 5. 1. Влияние внешнего крутящего момента
- 8. 5. 2. Влияние внешней поперечной силы на величину ошибки передаточного отношения
- 8. 6. Сравнение результатов моделирования и практических измерений
- 8. 6. 1. Частотный анализ полученных данных
- 8. 6. 2. Сравнение нагрузочных характеристик
- 8. 6. 3. Повышение точности вращения кругового привода подач
Повышение точности вращения круговых приводов подач станков с волновыми редукторами (реферат, курсовая, диплом, контрольная)
В связи с развитием в последнее десятилетие тенденции создания технологического оборудования новых поколений блочно-модульной конструкции, в том числе, прецизионного оборудования на основе интеллектуальных мехатронных узлов и распределенных систем управления, стала актуальной задача создания прецизионных механических узлов вращательного перемещений для станкостроения, робототехники и других отраслей машиностроительного комплекса.
Требования к системам приводов в станках в последние время значительно возросли. /22/, /52/ Станки становятся все точнее и динамичнее, отсюда возрастают требования и к приводам. Те производители, которые хотят иметь успех на рынке, должны выполнить ряд требований, которые формулирует потребитель исходя из типа своего производства. Традиционные критерии оценки станков при этом — экономичность, точность, мощность, надежность. Они характеризуют станок как отдельную автономную единицу. Дополнительно, в настоящее время рассматриваются критерии, которые характеризуют станок как часть гибкой производственной системы. Это — гибкость и возможность интеграции в ГПС. Экологический критерий все чаще имеет также не последнее значение. Производители станков требуют при этом компактные быстромонтируемые механизмы, при этом эти механизмы в довольно короткое время должны быть разработаны и представлены на рынок. Качество станка определяется, в основном, двумя противоречивыми принципами: точностью и производительностью. Точность, являясь основной комплексной оценкой качества прецизионных станков, зависит от множества критериев работоспособности, а именно: от жесткости и виброустойчивости станка, точности позиционирования, теплостойкости. Для обеспечения производительности при требуемой точности нужно повышать мощность приводных систем при сохранении точности передаваемого движения. Мощность привода Р определяют крутящий момент М и частота вращения п:
Р = 2/от А/ Формула 1.
Для электродвигателей повышение мощности при повышении номинального крутящего момента означает увеличение массы и габаритных размеров привода.
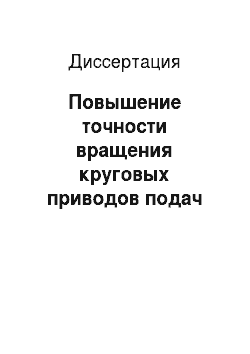
Повышение мощности путем увеличения частоты вращения выходного вала намного выгоднее. Чтобы достичь высокой относительной мощности (Р/m) имеет смысл в приводах применять мотор — редукторы.
500 100.
§ зоо п ?
100 0.
10 60 110 160 210 260 310 360 410 460 510 660 010 660 710 760 810 660 910 Э60 1010.
Номинальный крутящий момент/ [Нм].
Рис. 1: Сравнительная диаграмма.
Для приводов подач необходимы, как правило, низкие частоты вращения. Это справедливо также для приводов, которые преобразуют вращательное движение в поступательное, например, через передачу винт-гайка. Особенно высокое передаточное число необходимо там, где движение передается с зубчатого колеса на зубчатую рейку или непосредственно для вращательного движения подачи, например стола фрезерного станка.
Недостатком электромеханических систем привода, с быстроходными двигателями и высокопередаточным элементом является податливость привода, которая имеет кроме того нелинейный характер. На основе высокого ветвления передаваемой мощности на параллельные элементы зацепления при низкой нагрузке возникает более низкая жесткость, чем при высокой. Обусловленные изготовлением погрешности в приводе в комбинации с нелинейной кривой крутильной жесткости привода дают в итоге типичные нелинейные отклонения передачи вращения, которые противостоят необходимой высокой точности. Такие колебания можно скомпенсировать повысив демпфирования привода при помощи системы управления, применив датчики обратной связи, однако все это.
-¦-АМКСт&Н -•—Harmonic Drive Antriebslechnik GmbH Siemens AG.
Двигатель Мотор-редуктор угаовая читана ¦ крутящий монет = мтцн (х:ТЬ = угаоеая частота ¦ голяшкиаит привода j C, D4n=M щ = Р = М ф = С,-Й)Ч),'П 04 — м м -(D1 |}'.
— ведет к применению дорогостоящих систем ЧПУ, что в свою очередь ведет к удорожанию станка.
Заключение
.
Ввиду сложности изготовления волнового редуктора важной частью общей задачи является изучение влияния определенных погрешностей и сборки на динамическую точность. В результате имитационного моделирования и практических исследований было установлено следующее:
1. Превалирующее влияние («80%) на величину динамических погрешностей передаточного отношения оказывает несовпадение осей вращающихся деталей волнового редуктора, хотя нарушения работоспособности такая погрешность не вызывает.
2. В узлах, на основе волновых редукторов, где требуется высокая точность движения (круговой привод подач) необходимо точно рассчитывать собственные частоты редуктора для оценки устойчивости системы и работать в линейной области диаграммы крутильной жесткости.
3. Нелинейность крутильной жесткости зависит от величины бокового зазора в зубчатой передаче, которая определяется неточностями изготовления зубчатых колес и характером зацепления.
4. Как показали теоретические и экспериментальные исследования уменьшить влияние зазоров можно, применив предварительное нагружение редуктора, т. е. выбрать боковые зазоры по всей области зацепления.
5. При невозможности применения предложенных выше методов снижения влияния нелинейностей, необходимо ужесточить требования к производственным допускам на составляющие элементы привода, значения которых позволяет получить имитационное моделирование на основе разработанной математической модели кругового привода подач.
6. Применение имитационного моделирования позволяет назначать предельные значения физических и геометрических параметров волнового редуктора в зависимости от режима его работы для обеспечения требуемой точности передаточного отношения волнового редуктора, входящего в состав кругового привода подач.
7. Теоретические исследования были подтверждены экспериментами на специальном испытательном стенде в лаборатории института техники управления станками и производственными приспособлениями университета г. Штуттгарта.
2. Предложенная математическая модель кругового привода подач на основе волнового редуктора позволяет при проектировании назначать важнейшие параметры элементов привода (производственные допуска, геометрические параметры элементов) для обеспечения требуемой точности вращения.
Подводя итоги, можно сказать, что проделанная работа позволяет открыть новые возможности применения волновых редукторов в современном станкостроении, а также при предварительных расчетах систем приводов.
Список литературы
- -G.2/ Bertram, S.3/ Best, R.4/ Dennin, D.5/ Follinger, O.6/ Fritzer, A.7/ Gerstmann, U8/10/ Jachrow, F, Winkelmann, L.11/ Kalender, Т.К.
- EinfluG von Verzahnungsabweichungen und Zahnflankenspielen auf die GleichmSGigkeit der Bewegungsiibertragung und auf die Lastiiberhohungen in Planetengetrieben
- Frequency Analysis Using the Discrete Fourier Transform. Transactions of the IEEE, 18 (1970) Nr. 4, S. 495 Digitale Signalverarbeitung und -simulation. Band 1 Aarau: AT-Verlag, 1989.
- Konstruktionstechnik/Maschinenelemente. Dusseldorf: VDI Verl., 1994.-144 S12/ Kiyosawa, Y. A Study on Reduction of Torsional Vibration of Strain Wave
- Gearing. Doctoral Dissertation, Tohoku University, Japan, 199 813/ Klein, U Schwingungsdiagnostische Beurteilung von Maschinen und
- Anlagen DUsseldorf Stahleisen Verl. 1998 180 S. /14/ Klumpers, K. J. Theoretische und experimented Bestimmung der
- Dampfung Spielfreier Radialwalzlager. Fortscr.-Ber. VDI Reihe 1 Nr. 74. Dusseldorf: Vdi-Verlag 1980. 124 S., 54 Bilder15/ Ku$Qkay, F. Dynamik der Zahnradgetriebe: Modelle, Verfahren,
- Braunschweig: Vieweg, 1990 /18/ Michalec, G.W. Precision Gearing: Theory and Practice. John Wiley & Sons, 1.c. New York London — Sydney 1966 /19/ N.N. Волновые передачи: Сб. трудов / Под редакцией Н.И.
- Цейтлина. М.: Мосстанкин, 1970 — 463 с. /20/ N.N. Schwingungen in Antrieben 98: Tagung Frankenthal 10−11
- Sept. 1998 / VDI Geselschaft Entwicklung, Konstruktion, Vertieb. DUsseldorf: VDI Verl., 1998 — 678 S. /21/ N.N. Getriebeeinbausatze und Units. Baureie HFUC.
- Firmenkatalog Harmonic Drive Limburg/Lahn 1998 24 S. /22/ N.N. Станочное оборудование автоматизированногопроизводства / Под. Ред. В.В. Бушуева- М.: Изд-во «СТАНКИН», 199 423/ N.N. Детали и механизмы металлорежущих станков/под ред.
- Д.Н. Решетова, т.1, т. 2. М.: Машиностроение, 197 224/ N.N.25/ N.N.26/ N.N.27/ N.N.28/ N.N.29/ N.N.30/ Nitsche, W31/ Opitz, H32/ Prestl, W.33/ Prexler, F.34/ Pritschow, G., Eppler, C.35/ Ren, M. /36/ Rosenbauer, T.
- Zur Simuliation von Drehschwingungen in Antriebssystemen mit lokalen Nichtliniaritaten VDI Verlag Dlisseldorf 1991 145 S.
- Robust Torque Control of Harmonic Drive Systems, Departament of Electrocal Engineering McGill Univesity, Montreal, 1997
- Statistische Modellierung des nichtlinearen Getriebeeinflusses auf das statische und dynamische Roboterverhalten. VDI-Berichte 1094,1993, Seite 657.668 Understanding and Modeling the Behavior of a Harmonic Drive Gear Transmission, 1998
- ZahnkrSfte in geradverzahnten Planetenradgetrieben. Ruhr-Universitat Bochum, Institut fur Konstruktionstechnik, Lehrstuhl fur Maschinenelemente und Getriebetechnik. Werkzeugmaschinen B1−4-D (isseldorf. VDI-Verlag GmbH, 1979
- Высшая математика: Дифференциальные уравнения- Кратные интегралы- Ряды- Функции комплексного переменного: Учебник для вузов Изд. 4-е Основы конструирования станков. М.: Станкин, 1992 -520 с.
- Расчет механических систем приводов с зазорам М.: Машиностроение, 1979, -183 с. Динамика и моделирование электромеханических приводов, Саранск: Изд-во. Мордов. Ун-та, 1992 226 с. Конструирование узлов и деталей машин. — М. Высшая школа 1985.-416 с.
- Матлаб. Учебный курс. Питер. С-П. 2001. MATLAB 6/6.1/6.5 + Simulink 4/5. Основы применения. Полное руководство пользователя. Солон-Пресс. 2002. Волновые зубчатые передачи. М.: Высшая школа, 1981 -184 с.
- Системы с гистерезисом, М.: Наука 1983
- Детали и узлы малогабаритных редукторов. Л.:
- Машиностроение, 1967 147 с.
- Исследование угловых ошибок положения выходноговала в волновых редукторах, -Тезисы МВТУ 1972,15 с.
- Матлаб, описание, М. Диалог. 1997 г.
- Система инженерных и научных расчетов МАТЛАВ 5.x.
- Диалог-МИФИ. М. 1999. (В 2-х томах)1. Детали машин, М., 1974
- Точность металлорежущих станков. М.
- Машиностроение. 1986. 336 с.
- Обработка сигналов и изображений. МАТЛАВ 5х.1. Диалог-МИФИ. М. 2000.
- Математическое моделирование: Идеи. Методы. Примеры. М.: Физматлит, 1997.68/ Сергиенко А. Б. Цифровая обработка сигналов. СПб, Питер, 2002. — 608е.: ил.