Регулируемый асинхронный электропривод с частотно-управляемым сопротивлением в цепи ротора для крановых механизмов подъема
Наряду с указанными выше серийно выпускаемыми системами для крановых электроприводов подъема предложены и другие схемы асинхронных электроприводов с тиристорным параметрическим управлением, одной из которых является схема с импульсным регулированием величины эквивалентного сопротивления, вносимого в цепь ротора двигателя (рис. 1.1а), Тиристорный коммутатор ТК периодически шунтируя резистор R… Читать ещё >
Содержание
- 1. ОБЗОР РЕГУЛИРУЕМЫХ ТИРИСТОРНЫХ ЭЛЕКТРОПРИВОДОВ ДЛЯ КРАНОВЫХ МЕХАНИЗМОВ ПОДЪЕМА Ю
- 2. ИССЛЕДОВАНИЕ И АНАЛИЗ РАБ01Ы АСИНХРОННОГО ЭЛЕКТРОПРИВОДА С ЧАСТОТНО-УПРАВЛЯЕМЫМ СОПРОТИВЛЕНИЕМ В
- ЦЕПИ РОТОРА 2<
- 2. 1. Асинхронный электропривод с частотно-управляемым сопротивлением в цепи ротора, содержащей контур из активного и емкостного сопротивлений
- 2. 2. Асинхронный электропривод с частотно-уцравляемым сопротивлением в цепи ротора, содержащей контур из активного, емкостного и индуктивного сопротивлений
- выводы
- 3. ИССЛЕДОВАНИЕ ЭЛЕКТРОМАГНИТНЫХ ПРОЦЕССОВ В ИНВЕРТОРЕ АСИНХРОННОГО ЭЛЕКТРОПРИВОДА С ЧАСТОТНО-УПРАВЛЯЕМЫМ СОПРОТИВЛЕНИЕМ В ЦЕПИ РОТОРА И АНАЛИЗ ЕГО РАБОЧИХ ХАРАКТЕРИСТИК
- 3. 1. Исследование квазиустановившихся электромагнитных процессов в инверторе асинхронного электропривода с частотно-управляемым сопротивлением в цепи ротора, содержащей
- RC контур
- 3. 2. Анализ рабочих характеристик инвертора асинхронного электропривода с частотно-управляемым сопротивлением в цепи ротора, содержащей RC контур
3.3. Исследование электромагнитных процессов в инверторе асинхронного электропривода с частотно-управляемым сопротивлением в цепи ротора, содержащей RC контур, с помощью аналоговой вычислительной машины
3.4. Исследование электромагнитных процессов в инверторе асинхронного электропривода с частотно-управляемым сопротивлением в цепи ротора, содержащей RLC контур
ВЫВОДЫ
4. МЕТОДИКА. РАСЧЕТА МЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК И ПАРАМЕТРОВ АСИНХРОННОГО ЭЛЕКТРОПРИВОДА. С ЧАСТОТНО-УПРАВЛЯЕМЫМ СОПРОТИВЛЕНИЕМ В ЦЕПИ РОТОРА И СРАВНИТЕЛЬНЫЙ АНАЛИЗ ЭТОГО ЭЛЕКТРОПРИВОДА С РЕГУЛИРУЕМЫМИ ТИРИСТОРНЫМИ ЭЛЕКТРОПРИВОДАМИ
4.1. Методика расчета механических характеристик асинхронного электроцривода с частотно-управляемым сопротивлением в цепи ротора
4.2. Методика расчета параметров элементов схемы и построение системы уцравления асинзфонного электроцривода с частотно-управляемым сопротивлением в цепи ротора
4.3. Сравнительный анализ систем управления и характеристик регулируемых электроприводов переменного тока для крановых механизмов подъема
ВЫВОДЫ
5. ПОСТРОЕНИЕ И ИССЛЕДОВАНИЕ ЗАМКНУТЫХ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ АСИНХРОННОГО ЭЛЕКТРОПРИВОДА С ЧАСТОТНО-УПРАВЛЯЕМЫМ СОПРОТИВЛЕНИЕМ В ЦЕПИ РОТОРА
5.1. Замкнутая система асинхронного электропривода с частотно-управляемым сопротивлением в цепи ротора с суммирующим усилителем
5.I.I. Анализ и синтез статических характеристик
5Д.2, Линеаризация уравнений
5.1.3. Переходные процессы /
5.2. Замкнутая система асинхронного электропривода с частотно-управляемым сопротивлением в цепи ротора с подчиненным регулированием координат
ВЫВОДЫ /
6. ЭКСПЕРИМЕНТАЛЬНЫЕ ИССЛЕДОВАНИЯ АСИНХРОННОГО ЭЛЕКТРОПРИВОДА. С ЧАСТОТНО-УПРАВЛЯЕМЫМ СОПРОТИВЛЕНИЕМ В ЦЕПИ РОТОРА И ЭФФЕКТИВНОСТЬ ЕГО ПРИМЕНЕНИЯ ДЛЯ КРАНОВЫХ МЕХАНИЗМОВ ПОДЪЕМА /7J
6.1. Экспериментальные исследования асинхронного электропривода с частотно-управляемым сопротивлением в цепи ротора в лабораторных условиях
6.2. Технико-экономическое обоснование эффективности применения асинхронного электропри -вода с частотно-управляемым сопротивлением в цепи ротора для крановых механизмов подъема
ВЫВОДЫ
Регулируемый асинхронный электропривод с частотно-управляемым сопротивлением в цепи ротора для крановых механизмов подъема (реферат, курсовая, диплом, контрольная)
В Основных направлениях экономического и социального развития СССР на I98I-I985 годы и на период до 1990 года, утвержденных ХХУТ съездом КПСС, уделяется большое внимание внедрению комплексной механизации и автоматизации производственных процессов, сокращеншо во всех отраслях численности работников, занятых ручным трудом, особенно на вспомогательных и подсобных работах [I ].
В связи с этим большое значение имеет дальнейшее развитие подъемно-транспортных машин и, в частности, их автоматизированного электропривода.
Развитие современных автоматизированных крановых электроприводов ведется в основном в трех направлениях. Первое надравление связано с разработкой тиристорного электропривода постоянного тока, второе направление связано с созданием асинхронного электропривода с частотным управлением, а третье — с разработкой асинхронных электроприводов с тиристорным параметрическим управлением.
Асинхронные электроприводы с тиристорным параметрическим управлением отличаются от тиристорных электроприводов постоянного тока и от частотных асинхронных электроприводов своей простотой, надежностью инизкой стоимостью.
Были предложены различные схемы асинхронного электропривода с тиристорным параметрическим управлением, ряд которых нашли применение в электроприводах крановых механизмов [2,3,4]. Однако эти схемы не лишены недостатков, к числу которых можно отнести такие, как завышенная установленная мощность электродвигателя, необходимость тахогенератора и т. д.
Был предложен также способ импульсного регулирования выпрямленного тока ротора асинхронного двигателя с фазным ротором для крановых механизмов подъема [5], схема которого относительно простая, а за счет применения обратной связи по э.д.с. (без тахогенератора) можно получить жесткие механические характеристики. Кроме того, наличие выпрямительного моста в роторной цепи позволяет простым путем применять режим динамического торможения с самовозбуждением при спуске груза, использование которого повышает надежность и экономичность электропривода.
Однако основным недостатком указанного способа регулирования выпрямленного тока ротора импульсным методом является узкий диапазон регулирования двигателя по моменту, который зависит от допустимого напряжения на элементах схемы. Максимальное значение напряжения на силовых элементах схемы в цроцессе регулирования скорости электропривода прямо пропорционально отношению максимального значения выпрямленного тока к минимальному. Это является одной из причин ограничения области применения указанного способа.
Поэтому усовершенствование указанных выше схемных решений или разработка новых схем асинхронных электроприводов с тиристорным параметрическим управлением для крановых механизмов, является актуальной задачей.
Настоящая диссертационная работа посвящена разработке и исследованию регулируемого асинхронного электропривода с частотно-управляемым сопротивлением в цепи ротора, отличающегося лучшими технико-экономическими показателями, применительно для крановых механизмов подъема.
Целью диссертационной работы является разработка регулируемого асинхронного электропривода с частотно-управляемым сопротивлением в цепи ротора, исследование его статических и динамических режимов и целесообразности использования его для привода крановых механизмов подъема, а также проведение сопоставительного анализа разработанного электропривода с другими известными системами электроприводов.
Поставленная цель определяет решение следующих основных задач:
— разработка асинхронного электропривода с частотно-управляемым сопротивлением в цепи ротора и анализ его работы;
— исследование электромагнитных процессов в инверторе асинхронного электропривода с частотно-уцравляемым сопротивлением в цепи ротора;
— исследование статических и динамических режимов электропривода в замкнутой системе;
— разработка методики расчета элементов схемы, сопоставление работы разработанной системы с известными электроприводами;
— разработка схемы и исследование ее работы применительно для крановых механизмов подъема.
Методика исследований включает теоретические исследования переходных электромагнитных процессов в инверторе на основе математического моделирования на АВМ с применением дифференциальных и логических уравнений, статических и квазиустановившихся режимов в системе электропривода аналитическим путем на основе дифференциальных уравнений, динамических режимов электропривода методом математического моделирования на ЦВМ на базе дифференциальных уравнений, а также экспериментальные исследования работы автоматизированного электропривода в стендовых и промышленных условиях на действующем мостовом кране. При решении вопроса, связанного с оптимальным управлением разработанного электропривода, применен математический аппарат теории планирования эксперимента.
В настоящей диссертационной работе автор защищает:
— разработанную схему асинхронного электропривода с частотно-уцравляемым сопротивлением в цепи ротора;
— необходимость учета влияния эквивалентного сопротивления двигателя на рабочие характеристики инвертора;
— схему, которая позволяет путем математического моделирования на АВМ исследовать электромагнитные цроцессы в инверторе, содержащем контур из активного, индуктивного и емкостного сопротивлений;
— методику выбора и расчета параметров схем асинхронного электропривода с частотно-управляемым сопротивлением в цепи ротора;
— целесообразность применения асинхронного электропривода с частотно-управляемым сопротивлением в цепи ротора для крановых механизмов подъема.
Содержание диссертации изложено в 6 главах.
В первой главе дается обзор известных тиристорных электроприводов постоянного и переменного тока для крановых механизмов подъема. Анализируется область применения, а также положительные и отрицательные стороны этих электроприводов.
Во второй главе исследуется работа асинхронного электропривода с частотно-управляемым сопротивлением в цепи ротора методом первой гармоники для двух вариантов схем. Получены выражения, позволяющие анализировать работу электропривода в первом приближении и необходимые при инженерных расчетах.
В третьей главе исследуются электромагнитные процессы и рабочие характеристики инвертора асинхронного электропривода с частотно-управляемым сопротивлением в цепи ротора. Для расчета электромагнитных процессов применяются аналитические методы и методы математического моделирования на АВМ.
В четвертой главе дается методика расчета механических характеристик, а также методика расчета параметров элементов схем асинхронного электропривода с частотно-управляемым сопротивлением в цепи ротора. Сравниваются характеристики и система управления разработанного электропривода с известными регулируедыми тиристорными асинхронными электроприводами.
В пятой главе рассматриваются вопросы, связанные с замкнутой системой автоматического управления асинхронного электропривода с частотно-уцравляемым соцротивлением в цепи роторарассматриваются два варианта замкнутой системы: с суммирующим усилителем и с подчиненным регулированием координат. Исследуются статические и динамические характеристики электропривода в замкнутой системе. Рассматривается вопрос об оптимальном управлении разработанного электропривода. Исследования динамических режимов, а также расчеты процессов оптимального управления выполнены методом математического моделирования на ЦВМ.
Шестая глава посвящена экспериментальному исследованию асинхронного электропривода с частотно-уцравляемым соцротивлением в цепи ротора. Приведены кривые статических и динамических режимов разработанного электропривода, снятые на экспериментальных установках. Приводятся результаты испытаний, приведенных в промышленных условиях на действующем мостовом кране. В этой главе также приводится расчет экономической эффективности асинхронного электропривода с частотно-управляемым сопротивлением в цепи ротора и обосновывается целесообразность применения его в крановых механизмах подъема.
В приложениях даются расчетные значения параметров асинхронного электропривода, црограмма расчета переходных процессов, составленная на алгоритмическом языке ФОРТРАН-IV, а также цред-ставлены материалы, подтверждающие внедрение в народном хозяйстве разработанного электропривода.
I. ОБЗОР РЕГУЛИРУЕМЫХ ТИРИСТОРНЫХ ЭЛЕКТРОПРИВОДОВ ДДЯ КРАНОВЫХ МЕХАНИЗМОВ ПОДЪЕМА.
Для крановых механизмов подъема разрабатываются различные системы автоматизированных электроприводов, базирующихся, в основном, на тиристорном электроприводе постоянного тока, частотном асинхронном электроприводе и асинхронном электроприводе с ти-ристорным параметрическим управлением. Применение той или иной системы в крановых механизмах подъема определяется как требованиями производственного процесса, так и возможностями самой системы электропривода, при этом необходимо учитывать и такие факторы, как экономичность, надежность, простота и их стоимость.
Тиристорные электроприводы постоянного тока для крановых механизмов подъема, в основном, построены на базе серийно выпускаемых тиристорных агрегатов серии АТК (АТРК) и двигателей постоянного! тока серии Д (система ТП-Д) [2,6]. Тиристорные агрегаты обеспечивают изменение напряжения на якоре и на обмотке возбуждения двигателя. В системе ТП-Д обеспечивается диапазон регулирования скорости не менее 10:1. Для повышения жесткости механических характеристик в схеме применяется обратная связь по нацряжению якоря двигателя. Схема обеспечивает формирование механических характеристик в переходных цроцессах и получение скорости выше номинальной при операции с легкими грузами за счет ослабления потока возбуждения.
Система ТП-Д не лишена и отрицательных качеств, ограничивающих область ее применения. К таковым относятся: большие массы, габариты и стоимость установки, сложность системы, относительная меньшая надежность, невозможность работы двигателя в агрессивных и взрывоопасных средах, а также необходимость регулярного ухода за двигателем.
Учитывая перечисленные факторы, систему ТП-Д применяют для крановых механизмов мощностью свыше 50 кВт для напряженно работающих кранов, а также башенных кранов высотного строительства [ 7 ] .
Применение тиристорных преобразователей частоты для регулирования скорости короткозамкнутых асинхронных электроприводов крановых механизмов подъема обосновывается, в основном, следующим:
— регулирование скорости двигателя осуществляется почти без потерь;
— возможность регулирования скорости. двигателя выше номинальной;
— возможность получения диапазона регулирования скорости.
ЮМ;
— возможность применения такого электропривода во взрывоопасных и агрессивных средах.
В крановых асинхронных электроприводах применяются преобразователи частоты с непосредственной связью (ПЧН) и преобразователи частоты с промежуточным звеном постоянного тока инвертор-ного типа (ПЧИ) [2, 3, 4]. Для расширения диапазона регулирования по скорости применяются двухскоростные или трехскоростные короткозамкнутые асинхронные двигатели.
Основным недостатком тиристорных цреобразователей частоты при регулировании скорости крановых электроприводов является наличие большого количества силовых полупроводниковых элементов, а также сложность системы управления тиристорными преобразователями. Отечественной промышленностью для крановых асинхронных электроприводов выпускаются ПЧН серии ТТС мощностью 16, 40 и 80 кВт, а также ПЧИ с инвертором напряжения серии ПЧИ мощностью от 50 до 80 кВт [2] .
Система тиристорный преобразователь частоты — асинхронный двигатель (ТПЧ-АД), в основном, применяется в электроприводах кранов с большим диапазоном регулирования скорости, работающих как в напряженных режимах, так и в агрессивных и взрывоопасных средах.
В крановых механизмах подъема применяются также асинхронные электроцривода с тиристорным параметрическим управлением. Одна из этих систем тиристорный регулятор напряжения — асинхронный двигатель с фазным ротором (TFH-АДФ) применяется для крановых электроприводов подъема [2, 8]. В этой системе для получения жестких механических характеристик цредусмотрен тахогенера-тор. Реверсирование двигателя осуществляется с помощью контакторов в бестоковой паузе, в связи с чем улучшается условие работы реверсирующих контакторов. Резисторы, подключенные к контактным кольцам ротора, служат для снижения потерь в двигателе. Для изменения сопротивления резисторов в системе предусмотрены контакторы.
В этой системе можно получить диапазон регулирования скорости 10:1, формировать моменты, в переходных цроцессах. К основным недостаткам этой системы относятся наличие тахогенератора в схеме для получения жестких механических характеристик, невозможность получения скорости выше номинальной, а также сохранение контакторного управления со стороны ротора.
Асинхронные электроприводы с ТРН используются для крановых механизмов подъема, требующих диапазон регулирования скорости 10:1 и стабильные посадочные скорости, с учетом, что в этих условиях не требуются скорости выше номинальной при операции с легкими грузами.
В качестве тиристорных регуляторов напряжения для электро-цриводов крановых механизмов отечественной промышленностью серийно выпускаются тиристорные регуляторы серии РСТ на токи 100, 160, 320 А и напряжения 220, 380 В для регулирования скорости электродвигателей мощностью от 1,7 до 125 кВт [2] .
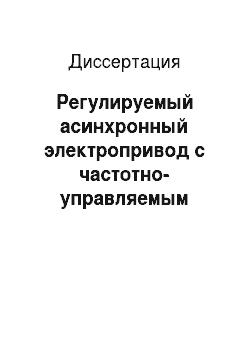
Наряду с указанными выше серийно выпускаемыми системами для крановых электроприводов подъема предложены и другие схемы асинхронных электроприводов с тиристорным параметрическим управлением, одной из которых является схема с импульсным регулированием величины эквивалентного сопротивления, вносимого в цепь ротора двигателя [5] (рис. 1.1а), Тиристорный коммутатор ТК периодически шунтируя резистор R, изменяет эквивалентное сопротивление роторной цепи. Схема отличается своей простотой. Имеющийся в роторной цепи выпрямительный мост позволяет выделить э.д.с. ротора, с помощью которой можно получить жесткие механические характеристики без применения тахогенератора. Схема также позволяет простым путем применить режим динамического торможения с самовозбуждением, с применением которого существенно улучшаются энергетические показатели привода, так как режим опускания груза осуществляется почти без потребления энергии из сети. Вместе с тем применение этого режима повышает надежность цривода. За счет применения обратных связей можно формировать статические и динамические характеристики асинхронного электропривода. При импульсном управлении в цепи выпрямленного тока ротора пульсации скорости и момента получаются меньшими, чем в схемах, где управление осуществляется в цепи переменного тока ротора импульсным или фазовым способом [9]. Следует отметить, что в процессе регулирования скорости электродвигателя мощностью скольжения в основном выделяется в резисторе R, т. е. регулирование скорости осуществляется плавным изменением эквивалентного активного сопротивления, вносимого в роторную цепь [ю] .
Однако некоторые недостатки ограничивают широкое применение данного электропривода. Одним из этих недостатков является увеличение напряжения на элементах схемы с ростом диапазона регулирования по моменту.
Имеются и другие варианты схем асинхронного электропривода с импульсным управлением в цепи выпрямленного тока ротора R б).
1 Рис.I.I. Принципиальные схемы импульсного управления в цепи выпрямленного тока ротора (а) и фазоимпульсное регулирование тока ротора (б) б, II]. Эти схемы отличаются друг от друга шунтирующими элементами, подключенными параллельно к тиристорному коммутатору. Каждый из этих вариантов схем имеет ограниченную область применения.
Схема, изображенная на рис. 1.16, отличается от схемы на рис. 1.1а тем, что здесь регулирование осуществляется фазоимпульс-ным способом [з, 12]. Коммутация тиристоров происходит во время перехода тока через нуль (естественная коммутация). Отпирание тиристоров осуществляется с помощью блока управления БУ. Частота вращения двигателя регулируется изменением угла открывания тиристоров. С изменением угла открывания тиристоров обеспечивается возможность изменять эквивалентное соцротивление контура ротора электродвигателя от /? до бесконечно большого значения. Для увеличения жесткости механических характеристик применяется обратная связь по скорости. Так как в данной схеме тиристоры работают с естественной коммутацией, то отсутствуют перенапряжения на тиристорах. Резистор R служит для улучшения энергетических показателей и переходных цроцессов электропривода. Однако увеличение величины R приводит к уменьшению максимально возможной частоты вращения и диапазона регулирования двигателя по скорости. Следует отметить, что цри малых нагрузках и скольжении двигателя меньше 0,3−0,2 двигатель оказывается трудноуправляемым [ 3 ]. Б процессе регулирования скорости двигателя цри постоянном моменте на валу, с ростом скольжения, потери в двигателе увеличиваются. Так как в этой схеме частота коммутации тиристорного коммутатора лежит в области f 50 Гц, то получаются большие пульсации скорости. Поэтому данную схему рекомендуют применять для крановых механизмов с большим моментом инерции.
Приемлемую характеристику для крановых механизмов можно получить применением несимметричного асинхронного электроцривода, функциональная схема которого изображена на рис. 1.2 [3]. rJ.
Рис. 1.2. Функционалля нсема несишетрич-ного асинхронного электропривода.
Рис. 1.3. Асинхронный электропривод с жпульсно-изменяемж сопротивлением в цепи ротора.
Здесь несимметрия создается за счет изменения в одной фазе вели-личины подводимого напряжения к двигателю. Изменение напряжения осуществляется за счет изменения угла отпирания тиристоров. Тиристоры управляются от блока управления БУ. Применением обратной связи по скорости можно получить жесткие механические характеристики электропривода. Если параллельно к тиристорам подключить конденсатор, то можно расширить диапазон и изменить знак момента двигателя. С регулированием угла открывания тиристоров можно изменить величину эквивалентной емкости конденсатора, и тем самым регулировать момент двигателя в широких пределах. Диапазон регулирования скорости несимметричного асинхронного электропривода можно получить в пределе (20 * 30) :1. Механические характеристики, получаемые при этом, цриемлемы для крановых механизмов подъема [3 ] .
Следует отметить, что в цроцессе регулирования скорости по мере увеличения скольжения потери в двигателе увеличиваются. А это приводит к увеличению установленной мощности двигателя.
Асинхронный электропривод с импульсно изменяемым сопротивлением в цепи ротора, схема которого изображена на рис. 1.3, была испытана для привода поворотного механизма судового крана и дала положительные результаты [ 13 ] .К ротору электродвигателя подключается однофазный инвертор, состоящий из тиристоров TI-T4 и конденсатора С через выпрямительный мост В. Тиристоры включаются попарно TI, ТЗ (Т2, Т4) и поочередно (со сдвигом 180°), вследствие чего через емкость С протекает переменный ток. Таким образом, с изменением частоты инвертора сопротивление роторного контура регулируется от R до бесконечно большого значения. Резистор R служит для увеличения постоянной времени разряда конденсатора. Индуктивность L ограничивает скорость нарастания тока через тиристоры. Одним из недостатков этого устройства является то, что в цроцессе регулирования скорости имеет место режим, когда ток ротора прерывается. Нами экспериментально установлено, что продолжительность паузы в течение одного периода инвертирования увеличивается по мере уменьшения частоты. На рис. 1.4 приведены осциллограммы токов статора, ротора 12 и скорости двигателя 6) при частоте инвертирования 250 Гц. По этим осциллограммам можно также судить о характере токов двигателя. Наличие активного сопротивления R в цепи выпрямленного тока ротора, способствуя выносу части потерь энергии скольжения из двигателя, но существенно снижает максимально возможную частоту вращения двигателя, уменьшая, тем самым, диапазон регулирования скорости.
Устройство, предложенное в [14] отличается от цредыдущего устройства тем, что в этом устройстве инвертор выполнен по полумостовой схеме, где вместо трансформатора использован дроссель с выведенной средней точкой обмотки. Эксперименты, цроведенные на установке, показали, что принцип работы этого устройства практически не отличается от описанного в [13]. Здесь также имеет место импульсный режим, когда ток ротора прерывается. О характере тока ротора 12 и выпрямленного тока в квазиустановившемся режиме работы рассматриваемого электропривода можно судить по осциллограммам, приведенным на рис. 1.5. Эти осциллограммы сняты автором диссертационной работы на однолучевом электронном осциллографе при частоте инвертирования 100 Гц. К числу существенных недостатков рассматриваемых устройств [13, 14] следует также отнести и то, что в процессе регулирования скорости двигателя мощность потерь скольжения выделяется, в основном, непосредственно в двигателе.
Сравнение приведенных выше систем показывает, что система асинхронного электропривода с тиристорным параметрическим управлением получается более цростой, дешевой и надежной в работе. С точки зрения же потерь электроэнергии, системы с ТП-Д и.
0,02 cm.
I-,.
Рис, 1.4. Осциллограммы токов статора Ij, ротора 12 к скорости двигателя <д) с шлульсно-иэменяемым сопротивлением в цепи ротора м М W.
1 1.
РисЛ.5. Осциллограммы тока ротора Ig и выпрямленного тока.
ТГН-АД являются более благоприятными, чем система с тиристорным параметрическим управлением. Поэтому наиболее целесообразно применение асинхронных электроцриводов с тиристорным параметрическим управлением для электроприводов средней и малой мощностей. Однако некоторые недостатки отдельных схем этой системы, такие как увеличение установленной мощности двигателя, ограниченный диапазон регулирования скорости и момента электроцривода, наличие техогенератора в схеме и т. д., создают определенные трудности. Поэтому совершенствование указанных или разработка новых схем с тиристорным параметрическим управлением для частичного устранения указанных выше недостатков является актуальной задачей.
Предложенные на кафедре «Электропривод и автоматизация промышленных установок» АзИНЕФТЕХИМ им. М.Азизбекова схемы асинхронного электроцривода с тиристорным параметрическим управлением [15, 16 ], которые в дальнейшем будем именовать как схемы асинхронного электроцривода с частотно-управляемым сопротивлением в цепи ротора, отличаются лучшими технико-экономическими показателями.
В следующих главах исследуются предложенные схемы, а также рассматриваются вопросы, связанные с применением этих схем для крановых механизмов подъема.
200 ВЫВОДЫ.
1. Экспериментальные исследования асинхронного электропривода с частотно-управляемым сопротивлением в цепи ротора, проведенные в лабораторных условиях показали, что данная система позволяет получить приемлемые характеристики для грузоподъемных механизмов в переходных и квазиустановившихся режимах.
2. Экспериментальным путем подтверждено, что регулирование скорости данного электропривода эквивалентно случаю плавного изменения активного сопротивления в роторной цепи электродвигателя.
3. Сравнение затрат для электроприводов крановых механизмов подъема с управлением магнитным контроллером с панелью динамического торможения с самовоз буждением, системой с тиристор-ным регулятором напряжения (ТРН-АДБ) и с асинхронным электроприводом с частотно-управляемым сопротивлением в цепи ротора показывает, что предложенная нами система обладает наилучшими экономическими показателями. г.
4. Промышленные испытания разработанного электропривода на подъемном механизме действующего мостового крана показали, что применение данной системы повышает его производительность. Годовой экономический эффект от внедрения этой системы составляет 2063 руб. для одного крана.
ЗАКЛЮЧЕНИЕ
.
1. Предложены два варианта асинхронного электропривода с частотно-управляемым сопротивлением в цепи ротора, отличающиеся улучшенными технико-экономическими показателями.
2. Варианты предложенных схем исследованы методом первой гармоники токовполучены зависимости, позволяющие произвести качественный анализ работы электропривода и в первом приближении рассчитать его параметры.
3. Квазиустановившиеся электромагнитные процессы в инверторе асинхронного электропривода с частотно-управляемым сопротивлением в цепи ротора рассмотрены аналитическим путем, а переходные электромагнитные процессы в инверторе — с помощью математического моделирования на АВМ.
4. В результате исследования асинхронного электропривода с частотно-управляемым сопротивлением в цепи ротора установлено:
— количественное и качественное влияние на рабочие характеристики инвертора величины эквивалентного сопротивления цепи выпрямленного тока;
— экстремальное изменение (с прохождением через максимум) напряжения на силовых элементах схемы по мере уменьшения коэффициента нагрузки инвертора, а следовательно, по мере увеличения частоты инвертирования при постоянстве R и В такое изменение напряжения на силовых элементах схемы позволяет существенно расширить диапазон регулирования момента электропривода без особого завышения напряжения на силовых элементах;
— что зависимость эквивалентного сопротивления RC контура от R при постоянстве частоты инвертирования / и емкости конденсатора С при R — 1/6,4fQ принимает максимальное значениедля расширения диапазон регулирования скорости электро привода рекомендуется принимать R > l/QfAfmaxC;
— что с увеличением частоты инвертирования при постоянстве выпрямленного тока ротора по мере увеличения скорости электропривода напряжение на силовых элементах схемы уменьшается. С учетом этого фактора даны рекомендации по выбору конденсатора.
5. Предложена методика расчета статических механических характеристик асинхронного электропривода с частотно-управляемым, сопротивлением в цепи ротора, а также параметров элементов схемы.
6, Исследованы статические и динамические режимы асинхронного электропривода с частотно-управляемым сопротивлением в цепи ротора в замкнутой системе. Для исследования динамических режимов электропривода в «большом» разработан алгоритм и составлена программа на алгоритмическом языке Ф0РТРАН-1У для расчета на ЦВМ. Показано, что данная система менее склонна к колебаниям, чем электроприводы постоянного тока с тиристорными преобразователями и каскадные асинхронные электроприводы при прочих равных условиях. Демпфирующие свойства этой системы объясняются с преобладающим значением величины эквивалентного сопротивления R0 ¦или RL0 контуров по сравнению с активными сопротивлениями указанными электроприводами,.
7, Предложена методика настройки нелинейного контура тока, позволяющая при постоянных значениях параметров регулятора тока обеспечить оптимизацию работы разработанного асинхронного электропривода.
Расчеты параметров регулятора тока проведены на ЦВМ. Для уменьшения расчетов, использована математическая теория планирования эксперимента.
8. Экспериментальные исследования асинхронного электропривода с частотно-управляемым сопротивлением в цепи ротора применительно к крановым механизмам подъема в лабораторных и промышленных условиях подтвердили целесообразность применения и эффективность этой системы для грузоподъемных механизмов. Годовой экономический эффект от внедрения данной системы на одном кране составляет 2063 руб.
Список литературы
- Крановое электрооборудование (справочник)/Ю.В.Алексеев, А. П. Богословский, Е. М. Певзнер и др.- под ред. А. А. Рабиновича. М.: Энергия, 1979, 240с.
- Герасимяк Р.П. Тиристорный электропривод для кранов. М.: Энергия, 1978, IIIc.
- Электрооборудование кранов/ А. П. Богословский, Е. М. Певзнер, Н. Ф. Семерня и др. М.: Машиностроение, 1983, 310с.
- Данилов П.Е. Асинхронный электропривод с регулированием выпрямленного тока ротора импульсным методом. М.: МЭИ, 1977, 68с.
- Справочник по преобразовательной технике/ Под ред. Н. М. Чиженко. К.: Техника, 1978, 447с.
- Тиристорный электропривод механизмов подъема башенных кранов для высотного строительства/А.П.Богословский, Е. Т. Алимов, А. Г. Яуре и др. Электротехническая промышленность. Электропривод. 1974, № 3(29), с. 21.
- Развитие асинхронных тиристорных электроприводов с фазовым управлением крановых механизмов/ А. Г. Яуре, А. П. Богословский, З. С. Волкова и др. В кн.: Автоматизированный электропривод. М.: Энергия, 1980, с.299−305.
- Браславский И.Я., Валек В. М. Расчет статических характеристик асинхронных электроприводов с параметрическим управ -лением. Электричество, 1982, № 2, с. 66.
- Соколов М.М., Данилов П. Е. Асинхронный электропривод с импульсным управлением в цепи выпрямленного тока ротора. М.:1. Энергия, 1972, 73с.
- Методика расчета параметров асинхронных электроприводов с импульсным регулированием выпрямленного тока ротора / М. М. Соколов, П. Е. Данилов, И. П. Филатенков и др. Тр. МЭИ, Автоматизированный электропривод. 1975, с.3−11.
- Герасимяк Р.П., Лещев В. А. Асинхронный тиристорный электропривод с управлением в цепи ротора. Электромашине -строение и электрооборудование, респ.межвед.научн.тех.сборник, 1977, № 25, стр.64−67.
- O.JHagdanz, S. Thamm, К. Wlldfanc^.
- Женишек В., Матейка M. Способ регулирования тока асинхронного двигателя с контактными кольцами, патент ЧССР, кл.21с 47/15, (Н02р 7/62), № 139 999.
- А.с. 610 279 (СССР). Устройство для регулирования скорости вращения асинхронного электродвигателя/ Б. М. Ппвд, Г. Ш. Алиев, З. А. Гасанов. Опубл. в Б.И., 1978, Jfc 21.
- Гасанов З.А. Новый способ регулирования скорости вращения асинхронных двигателей с фазным ротором и устройства для его осуществления. Ученые записки АзИНЕФТЕХИМа, 1977, № 2, стр.93т97.
- Толстов Ю.Г. Автономные инверторы. В кн.: Преобразовательные устройства в электроэнергетике. М.: Наука, 1964, с.3−38.
- Лабунцов В.А., Ривкин Г. А., Шевченко Г. И. Автономные тиристорные инверторы. М.-Я.: Энергия, 1967, 160с.
- Толстов Ю.Г. Автономные инверторы тока. М.: Энергия, 1978, 209с.
- Васильев А.С., СЛухоцкий А.Е. Ионные и электронные инверторы высокой частоты. М.-Л.: Госэнергоиздат, 1961, 180с.
- Шиллинг В. Схемы выпрямителей, инверторов и преобразователей частоты. М.-Л.: Госэнергоиздат, 1950, 464с.
- Шиллинг В. Тиристорная техника. Основы применения полупроводниковых приборов в технике сильных токов. Л.: Энергия, 1971, 265с.
- Беркович Е.И. Анализ электромагнитных процессов в ин-верторных схемах с помощью разрывных функций. Электротехническая промышленность. Преобразовательная техника. 1970, № 7, с.6−10.
- Беркович Е.И. Расчет переходного процесса в однофазном инверторе тока. Электротехническая промышленность. Преобразовательная техника. 1971, № 19, с.16−18.
- Тиристорные преобразователи высокой частоты/ Е.И.Бер-кович, Г. В. Ивенский, Ю. С. Иоффе и др. М.: Энергия, 1973, 200с.
- Папалекси Н.Д. О процессах в цепи переменного тока, содержащий электрический вентиль. Сборник «Труды АН СССР». М.: 1948, с.27−31.
- Кантер И.И. Введение в статику и динамику вентильных преобразователей частоты. Изд. Саратовского университета, 1970, 168с.
- Стульников В.И., Колчев Е. В. Моделирование полупроводниковых преобразователей. К*: Техника, 1971, 107с.
- Стульников В.И. Программирование задач для решения на АВМ. К.: Техника, 1978, 199с.30* Богрый B.C., Русских А. А. Математическое моделирование тиристорных преобразователей. М.: Энергия, 1972, 184с.
- ЧИженко И.М., Руденко B.C., Сенько В-И. Основы преобразовательной техники. М.: Высшая школа, 1974, 430с.
- Тетельбаум И.М., Шнейдер Ю. Р. 400 схем для АВМ. М.: Энергия, 1978, 247с.
- Ерофеев Ю.Н. Основы импульсной техники. М.: Высшаяшкола, 1979, 383с.34* Онищенко Г. Б. Асинхронный вентильный каскад. М.: Энергия, 1967, 153с.
- Малиновский А.К., Цыганко A.M. Расчет механических характеристик асинхронного вентильного каскада с учетом влияния активного сопротивления двигателя на работу выпрямителя. Изв. БУЗов Энергетика, 1971, Л 8, с.52−58.
- Данилов П.Е. Расчет механических характеристик асинхронного двигателя с трехфазным мостовым выпрямителем в роторной цепи. Электротехническая промышленность. Электропривод, 1979,9(80), с.4−7.
- Импульсный регулируемый электропривод с фазными электродвигателями/ Э. В. Шикуть, М. И. Крайцберг, П. А. Фукс и др. М.: Энергия, 1972, 104с.
- Чебовский О.Г., Моисеев Л. Г., Сахаров Ю. В. Силовые полупроводниковые приборы (справочник). М.: Энергия, 1975, 512с.
- Козминых Д.В., Захаржевский О. А. Некоторые свойства импульсных устройств в цепи выпрямленного тока ротора асинхронных электродвигателей. Сборник «Электроические машины», 1974, № I, с.161−164.
- Сандлер А.С., Тарасенко Л. М. Динамика каскадных асинхронных электроприводов. М.: Энергия, 1977, 198с.
- Калдербенк В.Дж. Курс программирования на фортране-1У. М.: Энергия, 1976, 72с.
- Чиликин М.Г., Ключев В. И., Сандлер А. С. Теория автоматизированного электропривода, М.: Энергия, 1979, 616с.
- Неймарк В.Е., Пистрак М. Я., Слежановский О. В. Управление вентильными электроприводами постоянного тока. М.: Энергия, 1970, 200с.
- Бесекерский В.А., Попов Е. П. Теория систем автомати -ческого регулирования. М": Наука, 1972, 767с.
- Теория автоматического управления/под ред. А.В.Нету-шила. М.: Высшая школа, 1976, 400с.
- Адлер Ю.П., Маркова Е. В., Грановский Ю. В. Планирование эксперимента при поиске оптимальных условий. М.: Наука, 1976, 279с.
- Ивоботенко Б.А., Ильинский Н. Ф., Копылов И. П. Планирование эксперимента в электромеханике. М.: Энергия, 1975, 184с.
- Спиридонов А.А. Планирование эксперимента при исследовании технологических процессов" М.: Машиностроение, 1981, 184с.
- Розенвассер Е.Н., Юсупов P.M. Чувствительность систем управления. М.: Наука, 1981″ 464с.
- Сборник технико-экономических показателей предприятий ВПО Союзэлектромаш. М.: Информэлектро, I98I.