Работа внешних сил, приложенных к упругой системе
В состоянии I приложена сила Р, а в состоянии II — момент М. В этом случае состоянию И соответствует прогиб, а состоянию I — угол поворота. Теорема о взаимности работ запишется в виде равенства РАРМ = М (рМР. Под действием этой силы балка деформировалась, как показано на рис. 5.5, б, а точка приложения силы переместилась по ее направлению на величину АРР. В этом случае действительная работа силы… Читать ещё >
Работа внешних сил, приложенных к упругой системе (реферат, курсовая, диплом, контрольная)
При определении работы внешних сил будем считать, что нагрузка, действующая на упругую систему, приложена статически, т. е. вызванные ею перемещения нарастают от нуля до определенного значения настолько медленно, что силами инерции, возникающими при движении масс системы, можно пренебречь.
Будем различать два вида работы: действительную и виртуальную (возможную).
Действительной работой силы называется работа, которая происходит на перемещениях, вызванных этой силой. В процессе накопления работы сама сила и вызванное ею перемещение точки ее приложения нарастают постепенно.
Для определения действительной работы Аа в осях v и W изобразим линейный график нарастания силы и перемещения (рис. 5.3). Если перемещение v получило приращение dv, то элементарная работа силы W будет.
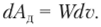
Когда сила достигла конечного значения Р, а перемещение равно Д,.

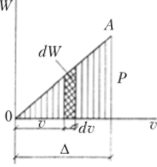
Рис. 53.
Рис. 5.4.
Таким образом, работа Ая равна площади заштрихованного треугольника. Согласно формуле (5.1) можно написать Аьр = РЬьр, поэтому.

Из этой формулы очевидно, что действительная работа является квадратичной функцией относительно силы Р и поэтому всегда является положительной.
Виртуальная работа Л, шрт есть работа неизменной силы Р на перемещении А^ТЮ вызванном какой-либо причиной ту например другой силой или температурой. Графически этот процесс изобразится прямоугольником (рис. 5.4). Тогда Лиирт = ±ДPfim. Эта работа может быть как положительной, так и отрицательной. Знак «плюс» будет в том случае, когда направление действия силы совпадает с направлением перемещения, а знак «минус» — когда перемещение происходит в направлении, противоположном действию силы Р.
Рассмотрим более общий случай, когда на упругую систему действует сложная нагрузка. Так, например, на простую балку (рис. 5.5, а) действуют две силы Р и Q.

Предположим, что вначале была приложена только одна сила Р, которая статически нарастала до своего конечного значения.
Под действием этой силы балка деформировалась, как показано на рис. 5.5, б, а точка приложения силы переместилась по ее направлению на величину АРР. В этом случае действительная работа силы Р равна {/2РАрр.
После этого также статически была приложена вторая сила Q, которая дополнительно изогнула балку (рис. 5.5, в). Точка приложения силы переместилась на величину A()q, и сила Q совершила на своем перемещении действительную работу, равную V^QAqq.
При повторном изгибе балки от силы Q приложенная ранее сила Р на перемещении APq произвела дополнительную работу, при этом сила Роставалась неизменной, следовательно, она произвела виртуальную работу PAPq. Полная работа будет равна.

Из формулы (5.4) следует, что суммарная работа сил Р и Q состоит из действительной работы (первое слагаемое) и виртуальной (возможной) работы PAPq.
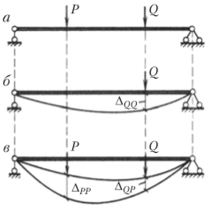
Рис. 5.6.
Изменим теперь порядок нагружения балки (рис. 5.6). Вначале приложим силу Q, которая вызовет изгиб балки, как показано на рис. 5.6, б. Сила Q произведет действительную работу '/jQAqq. После этого приложим силу Р (рис. 5.6, в). Балка дополнительно изогнется. Сила Р, постепенно нарастая, вызовет перемещение АРР и совершит действительную работу {fiPAPP, а точка приложения силы Q переместится на AqP. В этом случае сила Q совершит виртуальную работу {/iPAqP. Суммарная работа во втором варианте нагружения будет.

Учитывая, что общее состояние системы не зависит от порядка нагружения, приходим к выводу, что А = Ау. Формулы (5.4) и (5.5) имеют одинаковые первые слагаемые, поэтому.

или иначе.

где.

Таким образом, работа сил Р на перемещении, вызванном силой Q, оказалась равной работе силы Q на перемещении, вызванном силой Р.
Это правило, полученное на конкретном примере, справедливо и для общего случая. Оно формулируется как теорема о взаимности работ: виртуальная работа внешних сил состояния т па перемещениях, вызванных силами состояния п, равна работе сил состояния п на перемещениях, вызванных силами состояния т,
 aside class="viderzhka__img" itemscope itemtype="http://schema.org/ImageObject">
aside class="viderzhka__img" itemscope itemtype="http://schema.org/ImageObject">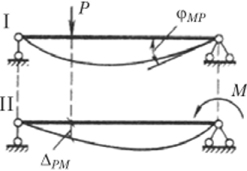
Рис. 5.7.
При вычислении работы перемещения одного состояния должны соответствовать характеру силовых факторов другого состояния. Так, например, если в первом состоянии приложена не сила, а момент, то во втором состоянии перемещением, соответствующим моменту, будет не прогиб, а угол поворота.
Рассмотрим пример. На рис. 5.7 показаны два состояния (I и II).
В состоянии I приложена сила Р, а в состоянии II — момент М. В этом случае состоянию И соответствует прогиб, а состоянию I — угол поворота. Теорема о взаимности работ запишется в виде равенства РАРМ = М (рМР.