Системы статической разгрузки и повышения динамической манипулятивности в механизмах параллельной структуры
Наиболее важным достоинством манипуляторов параллельной структуры, в сравнении со станками традиционной компоновки, представляющими совокупность последовательных незамкнутых кинематических цепей, является относительно низкая металлоемкость, достаточная жесткость, равномерное распределение нагрузки и как следствие, более высокие динамические показатели несущей системы. В этом отношении… Читать ещё >
Содержание
- ГЛАВА 1.
- РАЗГРУЗКА ПРИВОДОВ МЕХАНИЗМОВ ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ ОТ СТАТИЧЕСКИХ СИЛ
- 1. 1. СПОСОБЫ РАЗГРУЗКИ ПРИВОДОВ МАНИПУЛЯТОРОВ ОТ ДЕЙСТВИЯ СТАТИЧЕСКИХ СИЛ.,
- 1. 2. РАЗГРУЗОЧНЫЕ УСТРОЙСТВА ДЛЯ МАНИПУЛЯЦИОННЫХ МЕХАНИЗМОВ ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ
- 1. 3. МЕТОДИКА РАСЧЕТА УСИЛИЙ РАЗГРУЗОЧНЫХ УСТРОЙСТВ ДЛЯ МАНИПУЛЯТОРОВ ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ
- 1. 4. ПРИМЕР РАСЧЕТА УСИЛИЙ ДЛЯ НЕУПРАВЛЯЕМЫХ РАЗГРУЗОЧНЫХ УСТРОЙСТВ МАНИПУЛЯТОРА ПЕРЕМЕЩЕНИЯ ЗАГОТОВКИ РОБОТА- СТАНКА «РОСТ — 300»
- 1. 5. УПРАВЛЯЕМЫЕ РАЗГРУЗОЧНЫЕ УСТРОЙСТВА. РАСЧЕТ УСИЛИЙ УПРАВЛЯЕМЫХ РАЗГРУЗОЧНЫХ УСТРОЙСТВ ДЛЯ ТРЕХСТЕПЕННОГО МАНИПУЛЯТОРА ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ
- 1. 6. ЭКСПЕРИМЕНТАЛЬНЫЕ ДАННЫЕ ПРОВЕРКИ РАБОТЫ РАЗГРУЗОЧНЫХ УСТРОЙСТВ МАНИПУЛЯТОРА ПЕРЕМЕЩЕНИЯ ЗАГОТОВКИ РОБОТА- СТАНКА «РОСТ- 300»
- РЕЗУЛЬТАТЫ И
- ВЫВОДЫ
- ГЛАВА 2.
- ОСОБЕННОСТИ ТЕХНОЛОГИЧЕСКОЙ ОБРАБОТКИ ИЗДЕЛИЙ СЛОЖНЫХ ПРОСТРАНСТВЕННЫХ ФОРМ
- 2. 1. ГЕОМЕТРИЯ ИЗДЕЛИЙ СЛОЖНОЙ ПРОСТРАНСТВЕННОЙ ФОРМЫ
- 2. 2. СПОСОБЫ ФОРМООБРАЗОВАНИЯ СЛОЖНЫХ ПОВЕРХНОСТЕЙ МЕТОДАМИ РАЗМЕРНОГО ШЛИФОВАНИЯ
- 2. 3. ТРЕБОВАНИЯ НА СКОРОСТИ И УСКОРЕНИЯ ПРИ ОБРАБОТКЕ ИЗДЕЛИЙ СЛОЖНОЙ ПРОСТРАНСТВЕННОЙ ФОРМЫ
- РЕЗУЛЬТАТЫ И
- ВЫВОДЫ
- ГЛАВА 3.
- СИСТЕМЫ УПРАВЛЯЕМОЙ СТАТИЧЕСКОЙ РАЗГРУЗКИ И ПОВЫШЕНИЯ ДИНАМИЧЕСКОЙ МАНИПУЛЯТИВНОСТИ МЕХАНИЗМОВ ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ
- 3. 1. ВВЕДЕНИЕ
- ДОПОЛНИТЕЛЬНЫХ ПРИВОДОВ В МЕХАНИЗМЫ ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ
- 3. 2. КРИТЕРИИ ОЦЕНКИ КИНЕМАТИЧЕСКИХ И ДИНАМИЧЕСКИХ СВОЙСТВ МАНИПУЛЯТОРОВ ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ
- 3. 3. КРИТЕРИЙ ДИНАМИЧЕСКОЙ МАНИПУЛЯТИВНОСТИ ДЛЯ МАНИПУЛЯТОРОВ ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ
- 3. 4. УПРАВЛЯЕМЫЕ СИСТЕМЫ СТАТИЧЕСКОЙ РАЗГРУЗКИ МАНИПУЛЯТОРОВ ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ С ДОПОЛНИТЕЛЬНЫМИ ПРИВОДАМИ
- 3. 5. МЕТОДИКА ВЫБОРА ПАРАМЕТРОВ УСТРОЙСТВ ПОВЫШЕНИЯ ДИНАМИЧЕСОЙ МАНИПУЛЯТИВНОСТИ МАНИПУЛЯТОРОВ ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ ПО КРИТЕРИЮ ДИНАМИЧЕСКОЙ МАНИПУЛЯТИВНОСТИ
- РЕЗУЛЬТАТЫ И
- ВЫВОДЫ
- ГЛАВА 4.
- ПРИМЕР СИНТЕЗА ПАРАМЕТРОВ УСТРОЙСТВ ПОВЫШЕНИЯ ДИНАМИЧЕСКОЙ МАНИПУЛЯТИВНОСТИ ПЛОСКОГО 3 — X СТЕПЕННОГО МАНИПУЛЯТОРА ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ
- 4. 1. РЕШЕНИЕ ОБРАТНОЙ ЗАДАЧИ О ПОЛОЖЕНИЕ, ОПРЕДЕЛЕНИЕ УГЛОВ ПОЛОЖЕНИЯ ЗВЕНЬЕВ И УГЛОВ МЕЖДУ ЗВЕНЬЯМИ ДЛЯ МАНИПУЛЯТОРА ПЕРЕМЕЩЕНИЯ ЗАГОТОВКИ
- 4. 2. ПОСТРОЕНИЕ МАТРИЦЫ ОБРАТНЫХ ИНЕРЦИОННЫХ КОЭФФИЦИЕНТОВ ДЛЯ МАНИПУЛЯТОРА ПЕРЕМЕЩЕНИЯ ЗАГОТОВКИ
- 4. 3. СРАВНИТЕЛЬНЫЙ АНАЛИЗ МЕХАНИЗМА ПЕРЕМЕЩЕНИЯ ЗАГОТОВКИ ПРИ УСТАНОВКЕ ДВУХ ПРИВОДОВ И ПРИ УСТАНОВКЕ ПЯТИ ПРИВОДОВ
- 4. 4. РАСЧЕТ УСИЛИЙ ПРИВОДНЫХ ЭЛЕМЕНТОВ ДЛЯ ПОВЫШЕНИЯ ДИНАМИЧЕСКОЙ МАНИПУЛЯТИВНОСТИ МАНИПУЛЯТОРА ПЕРЕМЕЩЕНИЯ ЗАГОТОВКИ, ПРИ УСТАНОВКЕ ДВУХ ПРИВОДОВ И УСТАНОВКЕ ПЯТИ ПРИВОДОВ
- РЕЗУЛЬТАТЫ И
- ВЫВОДЫ
Системы статической разгрузки и повышения динамической манипулятивности в механизмах параллельной структуры (реферат, курсовая, диплом, контрольная)
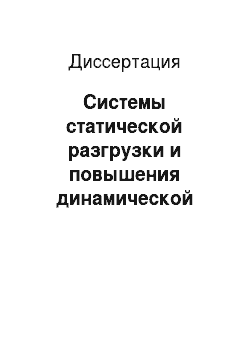
Одним из перспективных направлений развития современного станочного оборудования является использование станков — манипуляторов с параллельной кинематикой [1]. Механизм параллельной структуры (рис. 1), как правило, содержит выходное звено (1), соединенное с основанием (2) при помощи нескольких кинематических цепей сходного строения (3). Каждая кинематическая цепь состоит из нескольких подвижно соединенных звеньев, приводимых в движение однотипными приводами.
Наиболее важным достоинством манипуляторов параллельной структуры, в сравнении со станками традиционной компоновки, представляющими совокупность последовательных незамкнутых кинематических цепей, является относительно низкая металлоемкость, достаточная жесткость, равномерное распределение нагрузки и как следствие, более высокие динамические показатели несущей системы. В этом отношении использование механизмов параллельной структуры открывает новые возможности интенсификации режимов металлообработки и применения прогрессивных стратегий обработки [2].
Благодаря отмеченным выше свойствам, данные механизмы находят все более широкое применение в машиностроении и робототехнике, а также при построении различного вида испытательных установок и другого технологического оборудования.
Технологическое оборудование на основе механизмов параллельной структуры производит многокоординатную обработку деталей с более высоким быстродействием в сравнении с обычным оборудованием. Таким образом, применение механизмов указанного типа приведет к существенному уменьшению времени обработки и стоимости готового изделия.
Оборудование на основе механизмов параллельной структуры имеет огромное множество возможных вариантов исполнения. В самом общем виде все механизмы параллельной структуры можно разделить на группы по числу степеней подвижности выходного звена (Жсп=2, Жсп=3, Wcu=4, Wcn=5, Wcn=6) [3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14].
Вместе с тем, в связи с требованиями по жесткости к конструкции механизмов параллельной структуры, звенья механизмов могут иметь существенный вес, и часть момента приводных двигателей приходится тратить не на достижение максимальных ускорений выходного звена, а на преодоление сил тяжести.
Значительные ускорения требуются при механообработке сложных поверхностей (рис. 2), состоящих из множества участков с различной кривизной [15]. Поэтому производительность обработки сложных поверхностей в основном о! раничена ускорением. рис. 2.
Ранее задача статической разгрузки в робототехнических системах решалась конструктивными методами: методом корректировки масс, установкой дополнительных разгружающих элементов, как управляемых, так и не управляемых [16, 17].
Однако не рассматривались вопросы повышения динамических характеристик манипуляционных систем, построенных на основе механизмов параллельной структуры, путем использования систем активной управляемой разгрузки.
В связи с этим задача обеспечения значительных ускорений выходного звена манипуляторов параллельной структуры, при механообработке сложных поверхностей, путем построения систем активной управляемой разгрузки является актуальной.
Таким образом, целью настоящей работы является увеличение быстродействия станков — манипуляторов параллельной структуры, за счет обеспечения более высоких показателей ускорений выходного звена в пределах рабочей зоны, путем использования систем активной управляемой разгрузки с дополнительными приводами.
Для достижения поставленной цели в работе были поставлены и решены следующие научные и практические задачи:
— анализ и выбор способов статической разгрузки приводов манипуляторов параллельной структуры, обеспечивающих минимальную статическую нагрузку;
— анализ способов формообразования сложных поверхностей. Определение требований на скорости и ускорения при формообразовании сложных поверхностей;
— анализ и обоснование критериев для оценки кинематических и динамических характеристик механизмов параллельной структуры;
— формулировка и вывод критерия для количественной оценки эффективности установки дополнительных приводов в механизмы параллельной структуры;
— расчет усилий дополнительных приводов, выполняющих функции активной управляемой разгрузки;
— проверка выбранного критерия на примере манипулятора перемещения заготовки роботастанка «РОСТ — 300».
— проверка выбранного критерия на примере манипулятора перемещения заготовки роботастанка «РОСТ — 300».
Работа состоит из четырех глав и приложения: в первой главе рассматриваются способы разгрузки от статических сил в механизмах параллельной структуры. Предлагается алгоритм расчета усилий неуправляемых разгрузочных устройств, обеспечивающих минимальную статическую нагрузку на приводы механизма. Приводится расчет усилий неуправляемых разгрузочных устройств, для плоского пятизвенного манипулятора параллельной структуры.
Во второй главе рассматриваются особенности технологической обработки изделий сложных пространственных форм, способы формообразования сложных поверхностей. Формируются требования на скорости и ускорения при обработке изделий сложной пространственной формы.
В третьей главе приводится анализ и выбор критериев для оценки динамических характеристик манипуляционных механизмов. Для оценки максимального ускорения во всех возможных направлениях в пределах рабочей зоны выходного звена, предлагается критерий динамической манипулятивности для манипуляторов параллельной структуры. Предлагается алгоритм выбора параметров устройств активной управляемой разгрузки и повышения динамических характеристик, и оценка их по критерию динамической манипулятивности.
В четвертой главе производится синтез параметров устройств повышения динамической манипулятивности, плоского пятизвенного манипулятора параллельной структуры, манипулятор служит для перемещения заготовки робота-станка РОСТ — 300, и предназначенного для финишной обработки пера лопаток турбин различного промышленного назначения.
В приложении приводится описание программных средств расчета усилий неуправляемых разгрузочных устройств, манипулятора перемещения заготовки роботастанка «РОСТ -300», также приводится прикладная программа для расчета параметров системы активной управляемой разгрузки и оценка ее по критерию динамической манипулятивности для манипулятора перемещения заготовки роботастанка «РОСТ — 300».
Программы могут быть использованы для различных конфигураций механизмов параллельной структуры.
Основные результаты и выводы.
1. В работе решена научнотехническая задача, имеющая большое значение для производств, применяющих робототехнические системы, заключающаяся в увеличении быстродействия станковманипуляторов параллельной структуры при обработке сложных поверхностей.
2. В результате экспериментальных исследований показано, что разгрузочные устройства, с рассчитанными усилиями существенно разгружают приводные двигатели манипулятора перемещения заготовки «РОСТ — 300» от статических сил. Так, значения статических моментов М, действующих на привод D в пределах рабочей зоны, составляют не более 16% от номинального момента привода. Значения статических моментов М2, действующих на привод D2 в пределах рабочей зоны, составляют не более 24% от номинального момента привода.
3. При обеспечении требуемых режимов обработки на проблемных участках рабочей поверхности лопатки (кромка, прикомлевой участок и др.), необходимо создавать большие тангенциальные и центростремительные ускорения сферического инструмента относительно детали, что обеспечивается манипуляторами параллельной структуры с использованием систем активной управляемой разгрузки с дополнительными приводами.
4. Предложенный критерий динамической манипулятивности, для манипуляторов параллельной структуры позволяет:
— провести сравнение вариантов места установки исполнительных двигателей в сочленения механизма параллельной структуры и определить вариант, обеспечивающий одно и то же ускорение выходного звена меньшим значением моментов приводов.
— определить необходимую минимальную сумму квадратов динамических моментов в исполнительных приводах исходя из требований на ускорения выходного звена.
5. Теоретические и экспериментальные исследования показали, что предложенный критерий динамической манипулятивности для манипуляторов параллельной структуры, может эффективно использоваться для моделирования механизмов на стадии проектирования кинематических схем станочного оборудования на основе манипуляторов параллельной структуры.
6. Для манипулятора перемещения заготовки, для заданного ускорения выходного звена lg, при установке пяти приводов, рассчитываемый критерий изменяется в пределах от 0.8 313/(Н-с2) до 0,11 111/(Н-с2), при сумме квадратов усилий приводных элементов изменяемой в пределах от 7,3ТО4 (Нм)2 до.
5 2.
3,35−10 (Нм). При использовании двух приводов, критерий динамической манипулятивности изменяется в пределах от 0,19 465/(Н-с2) до 0,34 976/(Н-с2), при сумме квадратов усилий приводных элементов, изменяемой в пределах от 3 • 105 (Нм)2 до 1,96 • 10б (Нм)2.
7. Для кинематической схемы манипулятора перемещения заготовки и его весовых характеристик (Ри=96 Я, PL2=62,5 Я, PL3=67,2 Я, Ри=95,2, Рл5=34 Я, 7^=2192 Я, Рв=641 Я, Р^бб9 Я, РВ=Ш Я, Рё=2055 Я, //=1900 Я), для заданного ускорения выходного звена 1 g, при использовании в качестве активной управляемой разгрузки дополнительных приводов, сумма моментов пяти приводов (2109 Нм) в два с половиной раза меньше по сравнению с суммой моментов двух приводов (5703 Нм), установленных на основании манипулятора.
8. Материалы работы использованы в учебном пособии «Обрабатывающее оборудование на основе механизмов параллельной структуры», издательство МГТУ «СТАНКИН».
Список литературы
- Афонин В.Л., Подзоров П. В., Слепцов В. В. Обрабатывающее оборудование на основе механизмов параллельной структуры. М.: МГТУ Станкин, 2006. 449 с.
- Афонин В.Л., Крйнев А. Ф., Ковалев В. Е., Ляхов Д. М., Слепцов В. В. Обрабатывающее оборудование нового поколения. М.: Машиностроение, 2001. 256 с.
- Wen- jia C., Ming- yang Z., Ling Y. A Six- leg, Four- DOF Parallel ManipuaIator//3-rd Chemnitz Parallel Kinematics Seminar:
- Development Methods and Application Experience of Parallel Kinematics. Chemnitz 2002. p. 227- 240.
- Ю.Потапов В. А. Возможен ли успех станков новой концепции?//СТИН. 1996. № 4. С. 28- 32.
- Week M., Staimer D. Application Experience with a Hexapod Machine Tool for Machining complex Aerospace Parts// 3-rd Chemnitz Parallel Kinematics Seminar: Development Methods and Application Experience of Parallel Kinematics. Chemnitz 2002. p. 807−815.
- Бушуев B.B., Холыиев И. Г. Механизмы параллельной структуры в машиностроение.//СТИН. 2001. № 1. С. 3- 8.
- Потапов В.А. Прецизионное оборудование нового поколения.// СТИН. 1999. № 1.С. 28−32.
- Радзевич С. П. Формообразование сложных поверхностей. К.: Растан, 2001. 592 с.
- Щепетнльников В. А. Уравновешивание механизмов. М.: Машиностроение, 1982. 256 с.
- Мусатов А.К. Силовой расчёт, уравновешивание, проектирование механизмов и механика манипуляторов.М.: МГТУ, 1990. 76 с.
- Иосилевич Г. Б. Детали Машин. M.: Машиностроение, 1988. 368 с.
- Афонин В. Д., Смоленцев А. Н., Позиционно- силовое управление в механизмах параллельной структуры// Справочник. Инженерный журнал. 2003. № 5 С. 14- 18.
- Юнусов Ф.С. Формообразование сложнопрофильных поверхностей шлифованием. М.: Машиностроение, 1987. 248 с.
- Братухин А.Г., Халимулин P.M., Юнусов Ф. С. Размерное и безразмерное формообразование поверхностей деталей. М.: Машиностроение, 1996. 272 с.
- Каталог программного обеспечения Unigraphics стр. 3./Русская промышленная компания, 2001.
- Смоленцев А.Н., Математическое описание поверхностей проточной части турбинной лопатки.// Справочник. Инженерный журнал. 2002. № 3.
- Алберг Дж., Нильсон Э., Уолш Дж. Теория сплайнов и её приложения. М.: Наука, 1962 232 с.
- Смоленцев А.Н. Выбор конфигурации механизмов относительного манипулирования с избыточными степенями подвижности. // Автореферат. 2002.
- Корн Г., Корн Т. Справочник по математике. М.: Наука, 1977.
- Смоленцев А.Н. Формообразование поверхностей проточной части турбинной лопатки абразивным инструментом.// Справочник. Инженерный журнал. 2002 № 4.
- Yoshikawa Т. Manipulability of robot mechanisms// International Journal of robotics research. 1985. v.4. p. 3- 9.
- Lee J.H., Li B.J. Suh H. Optimal design of a five- bar finger with redundant actuation/ЛЕЕЕ int. Conf. Robotics Automation. Leuven, Belgium. 1998. p. 2068- 2074.
- Kurtz R., Hay ward V. Multiple- goal kinematic optimization of a parallel spherical mechanism with actuator redundancy// IEEE Trans. Robot. Automat. 1992. v. 8. p. 644- 651.
- Yi B.Y., Freeman R.A., Tesar D. Force and stiffness transmission in redundantly actuated mechanisms: The case for a spherical shoulder mechanism//Robot., Spatial Mech. Syst. 1994. v. 45. p. 163- 172.
- Kock S., Schumacher W. Control of a fast pfrallel robot with a redundant chain and gearboxes: Experimental results// IEEE int. Conf. Robotics Automation, San Francisco. CA. 2000.
- Valasek M., Bauma V., Sika Z, Vampola T. Redundantly actuated parallel structures- Prunciple, examples, advantages//in Proc. 3 rd Parfllel Kinematics Seminar Chemnitz. 2002. p. 993- 1009.
- Zhang Y., Jinliang G., Feng G. Singularity elimination of pfrfllel mechanisms by means of redundant actuation//12th IFToMM World Congress, Besan3on (France). 2007. June 18−21.
- Глазунов B.A. Пространственный механизм// Авторское свидетельство СССР 1989. Октябрь. № 1 757 867.
- Park F.C., Kim J.W., Manipulability of closed kinematic chains/Journal of mechanical design. 1998. December, v. 120 № 4. p 542−548.
- Valasek M., Sika Z., Hamrle V. From Dexterity to Calibrability of Parallel Kinematical Structures// 12th IFToMM World Congress, Besan.
- Byung- Ju Y., Member, IEEE, Sang- Rok O, Member, IEEE, II H.S., A Five- Bar Finger Mechanism Involving Redundant Actuators: Analysis and Its Applications// IEEE TRANSACTIONS ON ROBOTICS AND AUTOMATION. 1999. December, v. 15, № 6, p. 1001- 1010.
- Nahon M., Angeles J., Force optimization in redundantly actuated closed kinematic chains// Proceedings of the 1991 IEEE International Conference on Robotics and Automation. Sacramento, California. 1991. April, p. 238- 243.
- Miller A., Internal Preload Control of Redundatly Actuated Parallel Manipulators- Its Application to Backlash Avoiding Control// IEEE TRANSACTIONS ON ROBOTICS. 2005. August, v. 21. № 4. p. 668- 677.
- Kim J., Park F.C., Ryu S.J. and others. Design and analysis of a Redundantly actuated parallel mechanism for rapid maching.// IEEE Transactions on Robotics and Automation. 2001. v. 17. № 4. p. 423 434.
- Kokkonis Т., Milles P. A parallel robot-arm regional structure with actuational redundancy.//Mechanism and Machine Theory. 1991 vol. 26 № 6 p. 629−641.
- Смоленцев A.H., Афонин B.JI. Шарнир манипулятора (варианты). Патент РФ № 2 284 896, октябрь 2006.
- Смоленцев А.Н., Афонин B.JL, Куплинова Г. С. Способ управления двухкоординатным пятизвенным манипулятором. Патент РФ № 2 288 091, ноябрь 2006.
- Смоленцев А.Н. Вероятный метод уменьшения средней ошибки положения для механизмов параллельной структуры с дополнительными датчиками.// Справочник. Инженерный журнал. 2002. № 10 С. 26- 29.
- Valasek М. Sika Z. Hamrle V. From Dexterity to Calibrability of Parallel Kinematical Structures//12th IFToMM World Congress, Besan3on (France), 2007. June 18−21.
- Смоленцев А.Н. Самоидентификация геометрических параметров механизмов параллельной структуры.// Справочник. Инженерный журнал. 2004. № 1 С. 31- 34.
- Park F.C., Kim J.W. Manipulability and Singularity Analysis of Multiple Robot Systems: A Geometric Approach //Proceedings of the 1998 IEEE International Conference on Robotics & Automation Leuven, Belgium 1998. May. p.1032−1037.
- Kim J., Cho K.S., Hwang J.C., Iurascu C.C., Park F.C. Eclipse-RP: a new RP machine based on repeated deposition and machining.// Dynamics SPECIAL ISSUE PAPER 13 IMechE. 2002. v. 216.
- Yoshikawa Т. Manipulability of robot mechanisms //International Journal of robotics research. 1985. v.4. p. 3- 9.
- Jihong L., Hyungwon Shim On the Dynamic Manipulability of Cooperating Multiple Arm Robot Systems// Proceedings of 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems. Sendal Japan. 2004. September 28 -october 2. p. 20 872 092.
- Park F.C., Kim J. W. Manipulability of closed kinematic chains //Journal of mechanical design. 1998. December, v. 120 № 4 p. 542 548.
- Anwar Chitayat Rotary-linear actuator. Патент № US5952744 no кл. H02K41/00 23 июня 1998 г.
- Gerald L. Swift Rotary-linear actuator and method of manufacturing and method of using a rotary-linear actuator. Патент № US6798087 по кл. H02K41/00 8 января 2002 г.
- Gosselin С., Kong X. Cartesian parallel manipulators. Патент № US6729202 по кл. B25J11/00 от 31 мая 2001 г.
- Herve J.M., Sparacino F. Structural synthesis of «parallel» robots generating spatial translation//IEEE 1991 p.808−813.
- Kim S. Joint Actuation Switching in Closed-Chain Mechanisms for High Task Adaptability //Proceedings of the 1999 IEEE International Conference on Robotics & Automation. Detroit, Michigan. 1999. May. p. 531−536.
- Meyer N., Angeles J. Reducing the effects of shocks using redundant actuation //Proceedings of the 1991 IEEE International Conference on Robotics and Automation Sacramento, California 1991. April, p. 238−243.
- Forsythe G.E., Moler C.B. Computer colution of linear algebraic systems. 1967.
- Angeles J. The design of isotropic manipulator architectures in the presence of redundancies// The international journal of robotics research. 1992. v. 11. p. 196- 200.
- Lieguous A. Automatic supervisory control of the configuration and behavour of multibody mechanisms// IEEE Transactions on systems, man and cybernetics. 1977. v. 7. p. 868- 871.
- Химмельблау Д. Прикладное нелинейное программирование. М.: Мир, 1975. 303 с.
- Chang Р.Н. A closed form solution for inverse kinematics of robot manipulators// IEEE Journal of robotics and automation. 1987. v. 3. p. 393- 403.
- Кобринский А.А., Кобринский A.E. Манипуляционные системы роботов. M.: Наука, 1985. 343 с.
- Зенкевич C. JL, Ющенко А. С. Основы управления манипуляционными роботами. М.: МГТУ им. Н. Э. Баумана, 2004. 479 с.
- Смоленцев А.Н., Манипуляционные системы параллельно-последовательной структуры// Справочник. Инженерный журнал. 2003 № 5 С. 19- 22.
- Трухан Н.М. Динамика твердого тела. Учебно- методическое пособие. Теоретическая механика. М.: МФТИ, 2000. 42 с.
- Афонин B. JL, Казаков А. В., Смоленцев А. Н., Разгрузка механизмов параллельной структуры на примере плоского пятизвенного механизма.// Проблемы машиностроения и надежности машин. 2006. № 5 С. 20- 24.
- Denavit J., Hartenberg R.S. Kinematic Notation for Lawer- Pair Mechanisms Based on Matrices, J. Appl. Mech., 1955. p. 215- 221.