Коррекция статических характеристик электропривода с вентильным двигателем малой мощности и микропроцессорным устройством управления
В последнее время наблюдается быстрое развитие регулируемых электроприводов переменного тока малой мощности, использующих синхронные двигатели с постоянными магнитами. Регулируемые электроприводы с синхронными машинами могут иметь различные структуры: с дискретным управлением, с непрерывным управлением (синусоидальной формой фазных токов), с векторным управлением, с адаптивным управлением… Читать ещё >
Содержание
- В .1. Актуальность темы
- В.2. Цель, задачи и содержание диссертационной работы
- ГЛАВА 1. Разработка математической модели электропривода с вентильным двигателем и микроконтроллером
- 1. 1. Постановка задачи и основные допущения
- 1. 2. Уравнения электропривода с вентильным двигателем
- 1. 3. Модель синхронного электромеханического преобразователя во вращающейся системе координат
- 1. 4. Модель усилительно-преобразовательного устройства, содержащая два апериодических звена первого порядка
- 1. 5. Модель усилительно-преобразовательного устройства, содержащая звено чистого запаздывания и апериодическое звено первого порядка
- 1. 6. Особенности нескорректированных статических характеристик электропривода с вентильным двигателем
- 1. 6. 1. Характеристики электропривода при учете инерционности усилителя мощности
- 1. 6. 2. Характеристики электропривода при учете инерционности микроконтроллера
- 1. 6. 2. 1. Характеристики электропривода при описании микроконтроллера апериодическим звеном первого порядка
- 1. 6. 2. 2. Характеристики электропривода при описании микроконтроллера звеном чистого запаздывания
- 1. 6. Выводы
- 2. 1. Постановка задачи
- 2. 2. Законы коррекции, обеспечивающие минимизацию фазных токов
- 2. 2. 1. Коррекция при описании усилительно-преобразовательного устройства одной постоянной времени
- 2. 2. 2. Коррекция при учете инерционности микроконтроллера
- 2. 2. 2. 1. Коррекция при описании микроконтроллера апериодическим звеном первого порядка
- 2. 2. 2. 2. Коррекция при описании микроконтроллера звеном чистого запаздывания
- 3. 1. Постановка задачи
- 3. 2. Оценка времени вычислений, производимых микроконтроллером
- 3. 3. Влияние квантования в микроконтроллере на пульсации фазных напряжений и токов
- 3. 3. 1. Влияние дискретизации на пульсации напряжения на входе усилителя мощности
- 3. 2. 1. Учет квантования АЦП и ШИМ-генератора
- 3. 4. Разработка алгоритма численного дифференцирования сигнала датчика положения ротора
- 3. 5. Учет влияния ШИМ-усилителя на пульсации фазных напряжений и токов
- 3. 6. Определение пульсаций фазных напряжений и токов
- 3. 7. Методика проектирования усилительно-преобразовательного устройства с микроконтроллером
- 3. 8. Выводы
- 4. 1. Постановка задачи
- 4. 2. Экспериментальная установка
- 4. 3. Экспериментальное определение зависимости момента холостого хода от скорости
- 4. 4. Определение постоянной времени усилительно-преобразовательного устройства
- 4. 4. 1. Определение постоянной времени микроконтроллера
- 4. 4. 2. Определение постоянной времени линейного усилителя мощности
- 4. 5. Экспериментальное определение статических характеристик
- 4. 5. 1. Зависимость частоты вращения от напряжения управления
- 4. 5. 2. Зависимости потребляемого тока и амплитуды фазного тока от напряжения управления
- 4. 5. 3. Первая гармоника и постоянная составляющая фазного тока
- 4. 5. 4. Экспериментальная оценка влияния коррекции на статические характеристики
- 4. 5. 5. Влияние коррекции на фазу тока статора
- 4. 6. Исследование влияния быстродействия микроконтроллера на регулировочные характеристики
- 4. 7. Выводы
Коррекция статических характеристик электропривода с вентильным двигателем малой мощности и микропроцессорным устройством управления (реферат, курсовая, диплом, контрольная)
В.1.
АКТУАЛЬНОСТЬ ТЕМЫ
.
В последнее время наблюдается быстрое развитие регулируемых электроприводов переменного тока малой мощности, использующих синхронные двигатели с постоянными магнитами. Регулируемые электроприводы с синхронными машинами могут иметь различные структуры: с дискретным управлением [21,25,74,97], с непрерывным управлением (синусоидальной формой фазных токов) [6,68,114,121], с векторным управлением [7,156,165,166, 167,175,176,184,185,188,190], с адаптивным управлением [132,161], с фаззи-регуляторами [162], с гибридным управлением [171,173] с бездатчиковым измерением механических параметров [179]. В литературе [197,204,205,207] показано, что для обеспечения перемещения с высокими точностными характеристиками и быстродействия системы одной из самых перспективных является структура электропривода с векторным управлением синхронным двигателем. В отечественной литературе электропривод с синхронной машиной называется электроприводом с вентильным двигателем (ЭПВД) [22,125,132,141,202], или вентильным электроприводом [3,29,30].
Большинство публикаций, посвященных ЭПВД малой мощности, рассматривают дискретный способ управления (коммутации) синхронной машины [25,52,60,97,98,139]. Но дискретное управление ВД неприемлимо для высокоточных глубокорегулируемых приводов, поскольку не обеспечивает выполнение условий равномерности электромагнитного момента [97,207]. Для достижения равномерности момента ВД применяется непрерывный способ управления ВД [83].
В одном из первых достаточно полных описаний ЭПВД с непрерывным способом управления МДС якоря, содержащемся в работе [18] рассматриваются явнополюсные и неявнополюсные машины различного типа с частотно-токовым управлением, при котором усилитель мощности (УМ) охвачен глубокой отрицательной обратной связью по току и работает в режиме источника тока. В дальнейшем в большинстве опубликованных работ по ЭПВД с непрерывным управлением рассматривается управление синхронной машиной от источника напряжения [16,25,94,103,124,139], поскольку для машин малой мощности применение источника тока не имеет серьезных преимуществ, в связи с малым значением электромагнитной постоянной времени, линейностью и симметричностью характеристик и отсутствием во многих случаях токоограничения.
Однако большинство опубликованных математических моделей ЭПВД с непрерывным управлением не учитывают ряд факторов. В частности, усилительно-преобразовательное устройство (УПУ) принимается линейным и безынерционным, не содержащим цепей статической коррекции характеристик ВД. Между тем, реальные УПУ характеризуются заметным запаздыванием, а также наличием высших гармоник выходных напряжений, вызванных как нелинейностью характеристик УМ, например, за счет насыщения, так и пульсацией напряжений на выходах преобразователя координат (ПК) из-за фазочувствитель-ного выпрямления (в аналоговых ПК) или квантования сигналов (в цифровых ПК) [89].
Высшие гармоники фазного напряжения вызывают дополнительные потери в обмотке якоря, которые должны быть учтены при проектировании теп-лоотвода [9].
Применительно к ЭПВД особо грубым допущением является пренебрежение динамикой УПУ. Экспериментальные исследования ЭПВД на базе машин серии ДБМ показывают, что для них влияние постоянной времени УПУ гораздо больше, чем электромагнитной постоянной времени [88]. Во многих случаях именно эта постоянная времени определяет вид статических и динамических характеристик, ток потребления, схему статической коррекции и другие параметры ЭПВД. При микропроцессорном управлении ЭПВД учет запаздывания управляющего устройства в виде периода дискретности носит принципиальный характер.
Передаточная функция ЭПВД с инерционными усилителями тока на основе опытных данных была приведена еще в работе [18]. Однако аналитическое влияние инерционности УПУ при математическом описании ЭПВД с непрерывным управлением впервые было учтено лишь в публикациях Микерова А. Г. [10,83,89]. В дальнейшем аналогичный подход применен в работах [121,122,137]. Однако, результаты, полученные в указанных работах применимы к структурам ЭПВД с аналоговым ПК. Исследование влияния инерционности УПУ для ЭПВД с непрерывным управлением и цифровым ПК в рассмотренных работах отсутствует.
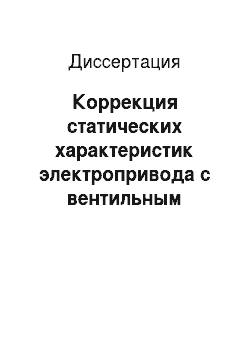
Наиболее широкое распространение в работах отечественных авторов [10,16,25,48,53,71,83,89,97,104,115], посвященных ЭПВД с непрерывным управлением, получила схема вентильного двигателя (ВД) с аналоговым устройством управления (УУ), изобретенная Д. В. Свечарником [155]. Преобразователь координат такого ЭПВД включает в свой состав ДПР, работающий в режиме СКВТ. На рис.В.1. показан двухфазный ВД, имеющий структуру, предложенную Свечарником, здесь М — модулятор, ГОН — генератор опорного напряжения, ВТ — синусно-косинусный вращающийся трансформатор, ФЧВфазочувствительный выпрямитель, Ффильтр нижних частот, «-1» — блок инверсии фазы (инвертирующий повторитель), УМлинейный усилитель мощности, СЭМП — синхронный электромеханический преобразователь. Блоки М, ГОН, ВТ, ФЧВ и Ф, которые осуществляют преобразование входного напряжения в фазные напряжения иА, ив, образуют усилительно-преобразовательное устройство (УПУ). ВТ используется в качестве преобразователя координат (ПК) и датчика положения ротора (ДПР). Данная структура ВД является классической структурой аналогового ВД с непрерывным управлением.
Для повышения надежности и точности ЭПВД, повторяемости параметров, реализации непрерывного управления ВД в составе ЭПВД малой мощности применяются цифровые микроконтроллеры (МК) [46,63,64,90,100,106]. Микроконтроллер в составе ЭПВД позволяет реализовать корректирующие.
VO сэмп.
Рис.В.1. ЭПВД с непрерывным управлением, изобретенный Д. В. Свечарником звенья (регуляторы и фильтры) и обеспечивает позиционную обратную связь, необходимую для работы СЭМП в режиме ВД [100,116,176,185,191].
При цифровом управлении ВД блок ПК реализуется в виде программы, находящейся в памяти МК.
Микроконтроллер перерабатывает информацию, поступающую от датчиков-источников информации, и в результате этой переработки формирует информацию о фазных напряжениях [48,100,176]. Внедрение в состав ЭПВД МК означает включение в аналоговую (непрерывную) систему цифровой подсистемы, представляющей собой нечто среднее между аналоговыми и дискретными системами: квантование по времени и по уровню, присущее цифровым устройствам, является признаком дискретной системы, но при этом все сигналы внутри цифровых систем являются непрерывными ступенчатыми, что характеризует их как аналоговые. Непрерывность во времени цифровых сигналов обеспечивают запоминающие устройства, к которым относятся память и все операционные устройства (регистры).
При цифровом управлении ВД электропривод становится цифро-аналоговой системой, поскольку СЭМП является аналоговым элементом. При замене аналогового управления электропривода на цифровое математическое описание системы управления усложняется, поскольку требуется дополнительно учитывать влияние дискретизации по времени и по уровню в цифровой части. В работе [108] рассмотрено влияние дискретизации в МК обобщенного ЭП, структура которого сводится к одномерной модели, на динамику цифрового ЭП. Влияние же дискретизации в ЦУУ на точность статических характеристик ЭП в работе [108] не рассмотрено.
Исследованию и созданию ЭПВД с МК посвящены труды Домрачева В. Г., Смирнова Ю. С. [51], Гориловского А. А. [100], Герман-Галкина С.Г. [144]. В работах [51,100] предложены конкретные технические реализации ЭПВД с цифровым управлением, но теоретическое обоснование и оптимизация решений не производятся. В работе [144] акцент сделан на исследование силовой части ЭПВД, а анализ влияния дискретизации в ЦУУ на характеристики ВД отч. сутствует.
В работе [83,122] рассмотрены алгоритмы коррекции инерционности ПК и СЭМП. Но не предложены способы их численной реализации и алгоритмизации задачи коррекции для применения предложенных формул в цифровых системах управления.
В работах [8,9] предложена методика проектирования электропривода с ВД серии ДБМ с непрерывным управлением. В работе [9], на этапе проектирования УПУ, рассматривается вариант использования в качестве преобразователя координат фазочувствительного выпрямителя (ФЧВ) с запоминающим элементом (ФЧВ-3). Постоянная времени такого ФЧВ равна 7i/coB, где совчастота возбуждения ВТ. Таким образом, ФЧВ-3 ведет себя также как МК, частота дискретизации которого равна сов. Однако, в соответствии с рекомендациями методики [9], ФЧВ-3 применяется в качестве ПК при низких частотах вращения, а при высоких частотах применяется ФЧВ с фильтром нижних частот (ФНЧ). Таким образом, использование методики [9] напрямую для ПК, реализованного в цифровом виде невозможно. Кроме того, в работе [9], при расчете потерь в обмотке статора учитывается только первая гармоника пульсаций выходного напряжения ФЧВ-3, и считается, что при постоянстве сдвига фаз сох, ФЧВ-3 не вносит пульсаций. Еще одним недостатком работ [8,9] является отсутствие методики проектирования УПУ для случая коррекции статических характеристик ВД, и в частности, для случая компенсации инерционности УПУ. Таким образом, методика [9] применима только для ЭП с аналоговой системой управления и требует дополнения и развития для случая цифрового управления. Для применения методики [9] к цифровым ЭПВД требуется изменение этапа проектирования УПУ.
В трудах отечественных ученых, специализирующихся на исследовании ЭПВД, Аракеляна А. К. [3], Лебедева Н. Щ77], Микерова А. Г. 84], Овчинникова И. Е. [96], Соколовского Г. Г. 121,122], Столова Л. И., Афанасьева А. Ю. [124] рассмотрение вопросов, связанных с исследованием ЭПВД с МК отсутствует.
В настоящее время известно большое количество работ, посвященных системам управления исполнительными электроприводами с ВД [16,17,31,32,48,80] и синтезу цифровых регуляторов тока, скорости и положения [41,60,69,81,116].
Отличительной особенностью ЭП с машинами переменного тока является влияние постоянных времени ЭП на статические и динамические характеристики [178]. Инерционность ПК, УМ и СЭМП обуславливает нелинейность статических характеристик ЭПВД [74,83,97]. Существуют три основных решения, позволяющих добиться компенсации влияния постоянных времени ЭПВД:
1. Организация структуры ЭПВД по принципу систем подчиненного регулирования [60], при этом синтез регуляторов тока и скорости производится с учетом постоянных времени ЭПВД [48].
Введение
отрицательной обратной связи по току и регулятора тока снижает влияние на характеристики ЭПВД электромагнитной постоянной времени СЭМП и постоянной времени УМ [60].
Введение
обратной связи по скорости и регулятора скорости снижает влияние постоянной времени преобразователя координат и электромеханической постоянной времени [41,94]. Однако, организация замкнутых контуров регулирования координат ЭПВД не позволяет добиться полной компенсации инерционности элементов ЭПВД.
2. В ЭПВД замыкаются контура регулирования токов, Iq, образуя систему векторного управления по току [7,178,196] во вращающейся системе координат (рис.В2.а).
3. Перед d-входом ПК ЭПВД включается блок СК коррекции (рис.В.2.б), вырабатывающий сигнал икомпенсирующий временное запаздывание и ослабление амплитуды сигнала управления [83,178,185,187].
Синтез ЭПВД с МК и использованием теории систем подчиненного регулирования, предлагается проводить в работах [16,125]. При этом рассматриваются математические модели обобщенного цифрового привода, применимые к ЭПВД, только в случае, когда динамические характеристики ВД аналогичны характеристикам электродвигателя постоянного тока и структурная схема ВД сводится к одномерной модели. Это верно при малых отклонениях от режима вращения с установившейся скоростью и при условии соГу «1, юГф «1, где.
Ту — постоянная времени УПУ, 7ф — электромагнитная постоянная времени, со электрическая частота. Таким образом, актуальна задача создания математической модели ЭПВД с МК для относительно больших значений соГу, имеющих место при использовании высокоскоростных ВД.
В работе [94] рассматривается влияние двух методов компенсации инерционности ПК на характеристики ЭПВД (подчиненного регулирования и введения блока коррекции), но совместное действие этих методов на статические характеристики ЭПВД не исследовано. В [94] получена математическая модель ЭПВД, замкнутого по скорости, с учетом влияния постоянной времени ПК и проведено исследование влияния компенсации инерционности ПК на динамические характеристики ЭПВД. Исследование влияния компенсирующего сигнала и^ на статические характеристики ЭПВД проведено при отсутствии тахо-метрической обратной связи и при задании частотонезависимого компенсирующего сигнала иj = const. Недостатком работы [94] является отсутствие синтеза блока коррекции, осуществляющего компенсацию инерционности ПК. Кроме того, в [94] не учитывается влияние инерционности УМ: постоянная времени УМ принимается равной нулю.
Современный ЭПВД с векторным управлением [7,167,178,196], реализованный на базе МК, включает (рис.В.2.а) синхронный электромеханический преобразователь (СЭМП) с постоянными магнитами, датчик положения ротора (ДПР), преобразователи координат ПК1 и ПК2, регуляторы токов Р1 и Р2, усилитель мощности (УМ).
Задание тока 1д, управляющего моментом ЭПВД, сравнивается с фактическим значением тока 1д, вычисляемым ПК2 на основании измеряемых значений фазных токов i^, ig. Ошибка 8д поступает на ПИ-регулятор Р1, на выходе которого вырабатывается напряжение управления uq.
Контур тока организован аналогично контуру тока Задание управляет угловым положением вектора тока статора относительно оси q. Как правило, на вход регулятора РТ2 ЭПВД с векторным управлением поступает задание = 0 [122,196,203,204], при этом обеспечивается максимизация электромагнитного момента для неявнополюсного СЭМП и компенсация нелинейности статических характеристик ЭПВД. Однако, в некоторых случаях, например, при двухзонном регулировании скорости ЭПВД [122], при реализации алгоритмов максимизации момента явнополюсного ВД или максимизации КПД.
ЭПВД [187] задание определяется необходимым законом управления и тождественно не равно нулю.
Для обеспечения регулирования скорости в структуре ЭПВД с векторным управлением замыкается обратная связь по скорости и перед контуром тока включается регулятор скорости (не показаны на рис.В.2.а).
Структура с векторным управлением зачастую является избыточной для ЭПВД малой мощности, так как требует замыкания обратной связи по току. При определении фазных токов ЭПВД с ШИМ-усилителем используются сложные измерительные алгоритмы. При векторном управлении ЭПВД регулирование производится во вращающейся системе координат, и замыкание обратной связи по току требует введение в структуру привода кроме преобразователя координат ПК1 преобразователя координат ПК2 (рис.В.2.а). При микропроцессорной реализации ЭПВД измерение токов, преобразование координат и регулирование токов осуществляются программными средствами.
Таким образом, замыкание обратной связи по току в структуре ЭПВД с векторным управлением, приводит к увеличению программного цикла, и как следствие, к возрастанию квантования управляющих сигналов иа, ир по уровню и увеличению дополнительных потерь в стали статора.
На рис.В.2.б показана структура ЭПВД с МК, обеспечивающая компенсацию нелинейности статических характеристик ЭПВД (коррекцию.
I,.
Id.
МК.
УПУ bq i.
Ж &d ?О pi A.
P2 ч Р.
ПК1 d а.
I,.
Id a.
Рис.В.2. Структуры ЭПВД с микроконтроллером, а) — ЭПВД с векторным управлениемб) — ЭПВД с коррекцией статических характеристик. характеристик) без замыкания контура тока. Блок СК коррекции формирует напряжение и^ на основании сигнала задания iig, информации об электрической частоте со и параметров, характеризующих инерционность УПУ и СЭМП. Такими параметрами являются постоянная времени УПУ Гу и электромагнитная постоянная времени 7ф.
В работе [48] проведено исследование цифрового ЭПВД с регулированием скорости, положения и коррекцией статических характеристик. В работе показано, что для ВД малой мощности с ШИМ-усилителем величина постоянной времени УПУ определяется преимущественно влиянием эквивалентной постоянной времени цифрового контроллера Тк, то есть Тк «Гум.
Экспериментальные исследования ЭПВД на базе цифрового сигнального процессора Motorola DSP56F805 и ШИМ-усилителя показали, что введение коррекции инерционности УПУ для ЭПВД с регулятором скорости дает возрастание частоты вращения на 18% и двукратное снижение тока потребления ВД, при номинальном напряжении питания и относительно малом значении постоянной времени УПУ (Гу=50мкс). Однако, в [48] отсутствует аналитическое описание влияния постоянной времени контроллера на характеристики ЭПВД, не раскрыт способ оценки значения постоянной времени ЦУУ. Полученное в работе [48] экспериментальное доказательство эффективности введения сигнала и^, компенсирующего незначительную инерционность УПУ ЭПВД, при наличии в структуре ЭП регулятора скорости, делает актуальной задачу компенсации инерционности МК посредством введения в структуру ЭПВД корректирующего звена [83,122,184].
В работе [83] произведено сравнение влияния электромагнитной постоянной времени 7ф и постоянной времени УПУ Ту на нелинейность механических и регулировочных характеристик ВД. Показано, что при равенстве шГф =(йТу = 0.5 нелинейность механической характеристики, обусловленная.
TY, составляет 20% и в 5 раз превосходит нелинейность, вызванную влиянием.
7ф. Кроме того, анализ формулы погрешности нелинейности регулировочной характеристики, полученной в [83] показывает, что при выполнении условия Ту «7ф погрешность линейности равна нулю, а при соотношении Ту «7ф погрешность линейности регулировочной характеристики ВД равна погрешности линейности механической характеристики. Результаты исследований влияния инерционности УПУ и инерционности электромагнитного преобразования энергии в СЭМП на линейности статических характеристик, полученные в работе [83] для ВД, построенных на базе СЭМП серии ДБМ, позволяют сделать вывод об актуальности задачи компенсации инерционности УПУ ЭПВД малой мощности. Однако в работе рассматриваются структуры ВД с аналоговыми ПК и отсутствует математическая модель ЭПВД с МК.
В известных технологиях [8,9,10,83] и публикациях [2,3,16,18,25,27,40,58,74,97,121,122,124,141], посвященных ЭПВД, влияние дискретности МК на статические характеристики ВД и законы управления, необходимые для линеаризации статических характеристик ВД с МК, практически не рассматриваются.
Анализ опубликованной литературы и учет задач, выдвигаемых практикой разработки и эксплуатации ЭПВД, позволяют считать, что разработка и экспериментальная проверка математической модели ВД с МК и коррекцией статических характеристик, а также создание методики проектирования ЭПВД с МК относятся к актуальным научно-исследовательским задачам.
В.2. ЦЕЛЬ, ЗАДАЧИ И СОДЕРЖАНИЕ ДИССЕРТАЦИОННОЙ РАБОТЫ.
Обзор и анализ опубликованных работ, а также расчетные и экспериментальные исследования по тематике диссертации, выполненные с участием автора в 2000 — 2008 годах в рамках гос. бюджетных и хоздоговорных НИР на кафедре электромеханики и электромеханотроники, кафедре систем автоматического управления и кафедре лазерных и измерительных навигационных систем СПбГЭТУ, позволяют считать актуальной следующую цель диссертационной работы: исследование особенностей построения информационной подсистемы электропривода малой мощности с вентильным двигателем на базе встраиваемых микроконтроллеров, обеспечивающих коррекцию статических характеристик (КСХ), динамическую коррекцию и другие задачи электропривода, и создание практической методики ее проектирования, включающей программирование микроконтроллера.
Для достижения указанной цели в диссертации решаются следующие теоретические и экспериментальные задачи:
1. Разрабатывается уточненное математическое описание ЭПВД с цифровой системой коррекции статических характеристик, в которой учитывается влияние дискретизации МК и производится компенсация ее влияния.
2. Разрабатывается методика цифровой коррекции статических характеристик ЭПВД с МК.
3. Разрабатывается методика проектирования УПУ ЭПВД с МК, в том числе, с учетом применения КСХ.
4. Разрабатываются численные алгоритмы КСХ для реализации в микроконтроллере.
5. Выполняется экспериментальная проверка разработанных методик и алгоритмов.
Научная новизна.
1. Математические модели ЭПВД малой мощности, отличающиеся от известных моделей рассмотрением двух инерционных элементов в составе усилительно-преобразовательного устройства, что позволяет учесть квантование в микроконтроллере и инерционность усилителя мощности.
2. Сформулированы законы коррекции статических характеристик, обеспечивающие минимизацию фазного тока и линеаризацию регулировочных и механических характеристик с учетом особенностей цифрового управляющего устройства (УУ).
3. Разработана методика проектирования усилительно-преобразовательного устройства с микроконтроллером, отличающаяся от известных методик процедурами расчета параметров цифрового УУ и датчика положения ротора, выбора алгоритма коррекции и анализа его эффективности, учетом влияния квантования МК и ШИМ-усилителя на высшие гармоники фазных напряжений и токов.
Практическая ценность диссертационной работы состоит в следующем:
1. Выработаны рекомендации по применению законов КСХ, учитывающих инерционность МК и УМ.
2. Разработана методика проектирования УПУ с МК, обеспечивающая определение основных параметров микроконтроллерного УУ, реализацию КСХ, определение периода программного цикла, многокритериальный выбор МК, определение пульсаций фазных токов и программирование МК.
3. Разработаны структура и принципиальные схемы ЭПВД с МК, обеспечивающие КСХ.
4. Предложены алгоритмы и программы управления ЭПВД с цифровой коррекцией инерционности УПУ, обеспечивающие существенное улучшение энергетических показателей и линеаризацию характеристик электропривода. Методы исследования.
Исследование ЭПВД с МК и разработка методики проектирования УПУ выполнены с использованием теории функций комплексной переменной, теории гармонического анализа и теории автоматического управления.
Численные методы применяются в виде пакетов программ MatCad, Simulink. Обработка экспериментальных данных производится с применением программы Excel.
Оценка адекватности разработанных математических моделей и физической модели выполнена при проведении натурных исследований экспериментального образца ЭПВД.
При выполнении экспериментальных исследований использовалась программа-монитор есш96, для изменения параметров модели, и программа specplus, для спектрального анализа фазных токов ВД.
Апробация работы Основные положения диссертации были доложены на.
• 1-ой международной конференции «Мехатроника и Робототехника -2000», ЦНИИ робототехники и технической кибернетики, Санкт-Петербург, май 2000.
• XXIII научно-технической конференции им. Н. Н. Острякова, ФГУП «Электроприбор», 2002.
• на семинаре секции «Электромеханические системы и средства управления ими» Международной энергетической академии и Российского научно-технического общества электротехники и электроэнергетики, 22.10.2009, СПб ИТМО.
Публикации:
По теме диссертации опубликовано 8 научных работ, из них — 7 статьей (4 статьи включены в перечень изданий, рекомендованных ВАК) и 1 работа — методическое пособие.
Структура и объем диссертации
.
Диссертация состоит из введения, четырех глав, заключения, списка литературы, включающего 208 наименований и 7 приложений. Основная часть работы изложена на 158 страницах машинописного текста, иллюстрированного 50 рисунками и 5 таблицами.
4.7. ВЫВОДЫ.
1. Для проверки теоретических результатов, полученных в разделах 13, создана экспериментальная установка с ВД на базе16-ти разрядного микроконтроллера INTEL 80С196МС, обеспечивающая непрерывное управление и коррекцию статических характеристик ЭПВД. Инерционность УПУ экспериментального образца ЭПВД определяется вкладом МК, ФНЧ и ЛУМ.
2. Разработаны алгоритмы управления для МК ЭПВД: алгоритм непрерывного управления ВД, алгоритм коррекции статических характеристик ВД, алгоритм для определения частотных характеристик ЛУМ.
3. Для нахождения значения постоянной времени ЛУМ произведено экспериментальное определение частотных характеристик ЛУМ. С помощью методики, предложенной в 3.2., рассчитано значение времени фазового запаздывания МК.
4. Установлена необходимость введения в математическую модель ЭПВД уравнений, учитывающих момент трения в редукторе, и предложена методика его экспериментального определения. В результате обработки экспери4 ментальных данных, полученных при использовании этой методики, установлено, что момент трения в редукторе зависит от угловой скорости вращения ВД, причем, зависимость М = M (Q) имеет линейных характер.
5. Установлено, что для исследования эффективности алгоритмов коррекции необходимо рассмотрение зависимостей токов ВД от частоты вращения п.
6. Получены экспериментальные регулировочные характеристики ЭПВД без коррекции и с введением цифровой коррекции для случая преимущественного влияния инерционности УПУ.
7. Сопоставление экспериментальных характеристик с расчетными позволяет считать, что математическая модель, описывающая МК в виде апериодического звена первого порядка, обеспечивает расчет и моделирование установившихся режимов с точностью 38%, а модель, описывающая МК звеном чистого запаздывания — с точностью 23%.
8. Точность аналитической модели, полученной во втором разделе для ЭПВД с управлением по d-входу, составляет 30.50%. Разброс точности обусловлен целочисленной реализацией алгоритма коррекции в микроконтроллере экспериментальной установки при условии нецелого значения постоянной времени УПУ (1.4мс).
9. В результате обработки опытных данных получено уравнение аппроксимации экспериментальной зависимости момента трения в редукторе от угловой скорости вращения ВД.
10. Установлено, что при отсутствии коррекции регулировочная характеристика холостого хода насыщается. При этом, максимально достижимаяско-рость ВД экспериментальной установки составляет 600 об/мин. Эффект насыщения регулировочных характеристик ЭПВД обусловлен зависимостью угла фазового запаздывания УПУ от частоты.
11. При компенсации инерционности УПУ (при задании постоянной времени, вводимой в алгоритм коррекции, равной 1мс) наблюдается исчезновение эффекта насыщения регулировочной характеристики и возрастание угловой скорости ВД на 40%, при неизменном значении напряжения управления.
12. Установлено, что введение коррекции существенно уменьшает потребляемый ВД ток. Например, при постоянной угловой скорости п = 600 об/мин ток уменьшается на 50% (с 0.8 до 0.4А,), а составляющая тока потребления ВД, вызванная влиянием высших гармоник, уменьшается вдвое (с 0.2 до 0.1 А).
13. Обнаружен эффект насыщения регулировочных характеристик ЭПВД, обусловленный ограниченным быстродействием МК. Насыщение происходит при увеличении частоты дискретизации МК до величины IN, где Го — период дискретизации МК, Nколичество интервалов дискретизации на период управляющей синусоиды.
ЗАКЛЮЧЕНИЕ
.
Основные научные результаты, полученные в диссертационной работе, можно сформулировать следующим образом:
1. Разработаны математические модели электропривода с вентильным двигателем и микроконтроллерным управлением, отличающиеся от известных моделей с аналоговыми устройствами управления, учитывающих инерционность усилительно-преобразовательного устройства, учетом квантования микроконтроллера по времени и по уровню. Первая (упрощенная) модель описывает микроконтроллер в виде апериодического звена первого порядка. Вторая (уточненная) модель рассматривает микроконтроллер как звено чистого запаздывания, вносящее фазовое запаздывание сигнала управления, равное половине периода дискретизации.
2. Получены новые законы коррекции статических характеристик электропривода с вентильным двигателем малой мощности при управлении по оси d, обеспечивающие минимизацию фазных токов и линеаризацию статических характеристик электропривода с микроконтроллерным управлением. При этом показано следующее:
• Чем больше расхождение между значениями времени чистого запаздывания микроконтроллера т и постоянной времени усилителя мощности, тем эффективней работает коррекция, полученная по упрощенной аналитической модели. Например, при сот = ю Ту =0.5 остаточная нелинейность после введения коррекции составляет 25%, а при сот=0.2мс, соГу=0.8мс остаточная нелинейность составляет 10%.
• При введении управления по оси d, удовлетворяющего критерию максимизации момента (минимизации потребляемого тока), для электропривода с вентильным двигателем и цифровым управлением, невозможна точная линеаризации статических характеристик: имеет место остаточная нелинейность, причем погрешность линейности меняет свой знак с «-» на «+».
• Для линеаризации статических характеристик электропривода при т<�Гу необходимо применять приближенный закон управления и^ =-соTyiiq, не учитывающий влияние т. Получена аналитическая оценка остаточной нелинейности при применении приближенного закона коррекции для ЭПВД с.
• Закон коррекции, полученный при описании микроконтроллера апериодическим звеном первого порядка, целесообразно применять при условиях т < Гу, ют < 1, поскольку при этом уменьшается величина возникновения методической ошибки.
• При преимущественном влиянии инерционности микроконтроллера, когда т > Гу, целесообразно применять закон управления, полученный при описании МК с помощью звена чистого запаздывания. Область применения коррекции по уточненной линейной модели ограничена частотами ют < п / 2.
3. Предложен алгоритм косвенного измерения частоты вращения ротора электропривода с вентильным двигателем и синусно-косинусным преобразователем угла посредством численного дифференцирования сигнала углового положения ротора, обладающий более высоким быстродействием по сравнению с известным алгоритмом.
4. Разработана новая методика проектирования усилительно-преобразовательного устройства, которая учитывает влияние высших гармоник, обусловленных дискретизацией сигнала углового положения ротора в микроконтроллере и квантованием в ШИП. Методика таюке учитывает время доступа микроконтроллера к памяти данных, время выполнения диспетчерского прерывания, и обеспечивает использование известной методики проектирования бесконтактного моментного привода с аналоговым управлением для проектирования электропривода с вентильным двигателем и микроконтроллерным управлением.
МК. динамического коэффициента усиления являющегося причиной.
5. Разработаны численные алгоритмы и программы управления электроприводом с вентильным двигателем и коррекции статических характеристик. Создана экспериментальная установка на базе микроконтроллера INTEL 80С196МС и синхронного электромеханического преобразователя ДБМ-63, обеспечивающая работу электропривода в режиме непрерывного управления и проверку новых методик цифровой коррекции статических характеристик вентильного двигателя.
6. Получены экспериментальные регулировочные характеристики электропривода с вентильным двигателем при отсутствии коррекции и при введении коррекции, подтвердившие эффективность разработанных законов цифрового управления для уменьшения потребляемых токов и линеаризации статических характеристик.
Список литературы
- Автоматизированный электропривод типовых производственных механизмов и технологических комплексов текст.: Учебник для вузов / М. П. Белов, В. А. Новиков, Л. Н. Рассудов. — М: Издательский центр «Академия», 2004. 576 с.
- Аракелян А.К., Афанасьев А. А. Вентильные электрические машины и регулируемый электропривод текст. /М.: Энергоатомиздат, 1997.
- Аракелян А.К., Афанасьев А. А., Чиликин М. Г. Вентильный электропривод с синхронным двигателем и зависимым инвертором текст. / Под ред. М. Г. Чиликина. М.: Энергия, 1977.
- Балагуров В.А., Гридин В. М., Лозенко В. К. Бесконтактные двигатели постоянного тока с постоянными магнитами текст. — М.: Энергия, 1975.
- Балковой А.С., Цаценкин В. К. Прецизионные электроприводы с вентильными двигателями текст. / Электропривод с вентильными двигателями // Докл. науч.-практ. семинара. М.: Издательский дом МЭИ, 2007. с.35−70.
- Байдаков В.А. Разработка и исследование регуляторов координат микропроцессорного электропривода для оборудования с ЧПУ текст.: Ав-тореф. дисс. к.т.н., ЛЭТИ, 1989.
- Башарин А.В., Новиков В. А., Соколовский Г. Г. Управление электроприводами текст.: Учеб. Пособие для вузов по специальности «Электропривод и автоматизация пром. установок». — Л.: Энергоиздат. Ленингр. отд-ние, 1982.
- Беленький Ю.М., Зеленков Г. С., Микеров А. Г. Проектирование исполнительных электродвигателей для многофункциональных систем автоматического управления текст. // Электротехника. 1988. № 8. с.16−18.
- Беленький Ю.М., Микеров А. Г. Выбор и программирование параметров бесконтактного моментного привода текст. // Л.: ЛДНТП, 1990.
- Беленький Ю.М., Зеленков Г. С., Микеров А. Г. Опыт разработки и применения бесконтактных моментных приводов текст. JL: ЛДНТП, 1987.
- Белов М.П. Аппаратная реализация измерителя угловой скорости бесконтактного моментного двигателя на базе датчика положения ротора текст. /М.П. Белов, Л. М. Карьков, В. Ф. Путьков // Известия ЛЭТИ, 1991. Вып.441- с.24−28.
- Белов М.П., Блец А. С. Имитационное моделирование вентильного электропривода станков с ЧЕТУ текст. // Известия ЛЭТИ / -1991. -Вып. 441.-с. 7−11.
- Бессекерский В.А., Изранцев В. В. Системы автоматического управления с микроЭВМ текст. — М.: Наука, Гл. ред. физ.-мат. лит., 1987.
- Бесконтактная электрическая машина магнитоэлектрического типатекст.: Патент RU N 2 091 969 / Н 02 К 29/00 / Евсеев Р.К.- Епифанова Л.М.- опубл. 27.09.97.
- Богорад Г. З., Киблицкий В. А. Цифровые регуляторы и измерители скорости текст. -М.—Л.: Энергия, 1966.
- Борцов Ю.А., Соколовский Г. Г. Автоматизированный электропривод с упругими связями текст.: 2-ое изд., перераб. и доп. СПб.: Энергоатомиз-дат. СПб. 1992.
- Борцов Ю.А. Адаптивное микропроцессорное управление электроприводами с вентильными двигателями текст.// Известия ЛЭТИ./. -СПб.: ГЭТУ.- 1997.-Вып. 513, с. 3−8.
- Бродовский В.Н., Иванов Е. С. Приводы с частотно-токовым управлением текст. -М.: Энергия, 1974.
- Булгаков А.Г. Микропроцессоры в системах электроприводов текст.: учеб. пособие. Новочеркасск: НПИ, 1990.
- Бут Д. А. Бесконтактные электрические машины текст.: учеб. пособие для электромех. и электроэнерг. спец. вузов. М.: Высшая школа, 1990.
- Бычков М.Г. Обзор современных электроприводов с вентильными двигателями и их применений текст.: докл. науч.-практ. семинара «Электропривод с вентильными двигателями». — М.: Издательский дом МЭИ, 2007. с. 15−34.
- Васильев Н.Ф. Разработка и исследование непосредственных электроприводов с моментными вентильными двигателями текст.: Автореф. дисс. канд. техн. наук / ЛПИ Л., 1986.
- Вевюрко И.А. Некоторые особенности расчета и проектирования бесщеточных микродвигателей постоянного тока текст. // Электротехника, 1964. № 4. С. 8−12.
- Вентильные электродвигатели малой мощности для промышленных роботов текст. / В. Д. Косулин, Г. Б. Михайлов, В. В. Омельченко, В. В. Путников. Л.:Энергоатомиздат, Ленингр. отд-ние, 1988, 184 с.
- Вейнгер A.M. Регулируемый синхронный электропривод текст. М.: Энергоатомиздат, 1985.
- Волков Н.И., Миловзоров В. П. Электромашинные устройства автоматики текст.: учеб. для вузов по спец. «Автоматика и телемеханика». — 2-е изд., перераб. и доп. М.: Высш. Шк., 1986.
- Волокитина Е.В. Исследование и разработка быстродействующего вентильного электропривода органов управления новых самолетов текст.: автореф. дисс. кандид. техн. наук, — Чебоксары, 2006.
- Воронин С. Г. Векторное управление вентильного электропривода текст. / Воронин С. Г., Коробатов Д. В., Запунный В. В., Шабуров П. О. //
- Вестн. ЮУрГУ. Сер. Энерг. 2004, N 5, с. 11−14
- Второе В.Б. Применение метода инверсии для построения структурной математической модели бесконтактного моментного двигателя постоянного тока текст. //Изв. ЛЭТИ. 1986. Вып.369. с. 52−54.
- Второв В.Б., Поляхов Н. Д., Путов В. В. Разработка быстродействующих следящих систем с бесконтактным моментным двигателем текст.: всесоюзная НТК по вентильным электромеханическим системам с постоянными магнитами. М.: МЭИ, 1989.
- Высоцкий В.Е. Вентильные двигатели с искусственной коммутацией (Теория, разработка, исследование, использование в электроприводе) текст.: автореф. дисс. доктора техн. наук. Самара, 2005.
- Ганин А.С. Новые решения в области прецизионного сервопривода от Schneider Electric текст.: докл. науч.-практ. семинара «Электропривод с вентильными двигателями». — М.: Издательский дом МЭИ, 2007. с.114−120.
- Герман-Галкин С.Г. Matlab & Simulink. Проектирование мехатронных систем на ПК текст.: учеб. пособие для вузов. СПб.: КОРОНА-Век, 2008.
- Герман-Галкин С.Г., Ермилов А. С. Электромеханические характеристики разомкнутых и замкнутых систем электропривода с бесконтактным моментным двигателем текст. // Техн. Электродинамика. — 1989. № 3. — с. 85−89.
- Глазенко Т.А. Полупроводниковые преобразователи в электроприводах постоянного тока текст. Л.: Энергия, 1973.
- Глазенко Т.А., Синицын В. А., Толмачев В. А. Выбор частоты коммутации силовых ключей замкнутых систем автоматического регулирования с транзисторными широтно-импульсными преобразователями текст. // Электротехника. 1988. № 10. с.64−68.
- Голландцев Ю.А. Преобразование сигналов в системе управления вентильным индукторно-реактивным двигателем текст. — Известия вузов. Серия Приборостроение, 2003, № 10. с. 50−55.
- Голик С.Е. Программирование микропроцессорных регуляторов автоматических систем: Программная реализация ПИ-регулятора текст.:учеб. пособие / ЛЭТИ. Л. 1991.
- Грузов В.Л. Управление электроприводами с вентильными преобразователями текст.: учеб. пособие / Вологда: ВоГТУ, 2003. 294с.
- Джанхотов В.В. Исследование и разработка следящих электроприводов на базе вентильных двигателей с управлением от сигнального процессора для шагающего робота текст.: дисс. канд. техн. наук. Санкт-Петербург, 2004.
- Доманов В. И., Доманов А. В. Разработка и исследование микропроцессорной системы управления моментного электропривода рулевого механизма текст. // Электротехника. 2001, N 5, с. 35−38
- Домрачев В.Г., Смирнов Ю. С. Цифроаналоговые системы позиционирования (электромеханотронные преобразователи) текст. .М., Энерго-атомиздат, 1990.
- Дубенский А.А. Бесконтактные двигатели постоянного тока текст. — М.: Энергия, 1967.
- Епифанова Л.М. Влияние погрешностей датчика положения на величину пульсации момента бесконтактного моментного двигателя текст. // Вопросы теории и проектирования электрических машин. Саратов: Саратовский ун-т, 1987. № 5. С. 18−22.
- Епифанов O.K. Современные электромеханические устройства безре-дукторных вентильных электроприводов текст.: докл. науч.-практ. семинара «Электропривод с вентильными двигателями». — М.: Издательский дом МЭИ, 2007. с.71−99.
- Завалишин Д.А. Вентильные преобразователи в силовых цепях электрических машин. Лекции текст. — Л., 1967 (ЛИАП).
- Залялеев С. Р. Уравнения состояния микропроцессорной системы электропривода с несколькими периодами дискретности текст. // Электро-техн. системы и комплексы. 2000, N 5, с. 72−79
- Зиннер Л.Я., Скороспешкин А. И. Вентильные двигатели постоянного и переменного тока текст. -М.: Энергоиздат, 1981.
- Извеков В.И., Кузнецов В. А. Вентильные электрические двигатели текст.: учеб. пособие по курсу «специальные электрические машины». М.: Изд-во МЭИ. 1998.
- Качество электрической энергии. Текст.: ГОСТ 23 875–79. М.: Издательство стандартов. 1980.
- Ковчин С.А., Сабинин Ю. А. Теория электропривода текст.: учебник для вузов. СПб.: Энергоатомиздат. Санкт-Петербургское отд-ние, 2000.
- Кодкин В. Л., Гафиятуллин P. X., Хайбяков Э. Р. Частотный анализ цифровых систем управления высокоточными следящими электроприводами с учетом звена подавления текст. Вестн. ЮУрГУ. Сер. Энерг. 2002, N 2, с. 60−62
- Козаченко В.Ф. Микроконтроллеры: руководство по применению 16-разрядных микроконтроллеров Intel MCS-196/296 во встроенных системах управления текст. — М.: издательство ЭКОМ, 1997.
- Козаченко В.Ф. Основные тенденции развития встроенных систем управления двигателями и требования к микроконтроллерам текст. // CHIP NEWS, 1999. № 1(34). с.2−9.
- Козаченко В., Анучин А., Дроздов А. Сигнальные микроконтроллеры Texas Instruments для управления двигателями и автоматизации промышленности текст. // Электрон, компоненты. 2004, N 7, с. 91−95.
- Коссов О.А. Усилители мощности на транзисторах в режиме переключений текст. -М.: Энергия, 1971.
- Коськин Ю.П. Введение в электромеханотронику текст. СПб.: Энер-гоатомиздат. С.-Петербург. Отд-ние, 1991.
- Кочергин, В.В. Коррекция механической характеристики синхронного вентильного двигателя текст. // Электротехника. 2007. — N 6. — С. 61−63.
- Кояин Н. В., Мальцева О. П., Удут Л. С. Оптимизация контуров регулирования систем электропривода по симметричному оптимуму текст. //Изв. Томск, политехи, ун-та. 2005. 308, N 7, с. 126−129.
- Крайников А.В., Курдиков Б. А. и др." Вероятностные методы в вычислительной технике [текст]. — М., 1986.
- Круг Е.К., Александриди Т. М., Дилигенский С. Н. Цифровые регуляторы текст. — М.-Л.: Энергия, 1966.
- Кулесский Р.А., Шубенко В. А. Электроприводы постоянного тока с цифровым управлением текст. — М.: Энергия, 1973.
- Куприянов М.С., Матюшкин Б. Д. Цифровая обработка сигналов: процессоры, алгоритмы, средства проектирования текст. // 2-е изд., пере-раб. и доп. — СПб.: 1999.
- Лебедев Н.И., Гандшу В. М., Явдошак Я. И. Вентильные электрические машины текст. СПб.: Наука, 1996.
- Лутидзе Ш. И. Основы теории электрических машин с управляемым полупроводниковым коммутатором текст. — М.: Наука, 1968.
- Марков В. В., Слядзевская К. П. Индексная табличная ШИМ в автономном инверторе напряжения текст. // Электротехника № 1, 2000
- Мартынов А.А. Проектирование электроприводов текст.: учеб. пособие. / СПбГУАП, СПб, 2004.
- Матюхина Л.И. Разработка и исследование следящих систем с бесконтактными двигателями постоянного тока и нелинейными корректирующими устройствами текст.: Автореф. дисс. канд. техн. наук-Рязань,
- Микеров А.Г. Механические и регулировочные характеристики бесконтактного моментного привода с электродвигателями серии ДБМ текст. // Вопросы специальной радиоэлектроники. Серия РЛТ. 1986. № 4, с.135−143.
- Микеров А.Г. Особенности проектирования регулятора для систем автоматического управления с бесконтактным моментным приводомтекст.: тез. докл. Всесоюзн. НТС по электромеханотронике:. Л.: АН СССР, 1989. С. 138−140.
- Микеров А.Г. Управляемые вентильные двигатели малой мощности текст.: Учебное пособие. СПбГЭТУ. СПб, -1997.
- Микеров А.Г. Электромеханические датчики и электронные компоненты управляемых вентильных двигателей текст.: Учеб. пособие. -СПбГЭТУ. СПб, 1999.
- Микеров А.Г., Мустафа М. Н., Самохвалов Д. В. Электрические машины систем автоматики и компьютерных технологий текст.: Методическое пособие к лабораторным работам. С.-Петербург: ЭТУ, 2001. 36с.
- Микеров А.Г., Самохвалов Д. В. Улучшение характеристик вентильного двигателя введением цифровой коррекции текст.: Тезисы докладов на XXIII НТК им. Н. Н. Острякова // журнал «Гироскопия и Навигация» № 4 (39), 2002, с. 96.
- Микеров А.Г., Самохвалов Д. В. Цифровая коррекция статических характеристик исполнительных вентильных двигателей текст. // журнал «Гироскопия и Навигация» № 1 (44), 2004, сс. 126−132.
- Микропроцессорное управление синхронным электроприводом текст.: материалы семинара «Применение микропроцессорных устройств в промышленном электроприводе». // А. М. Вейнгер, А. Д. Гильдебранд, С. Ю. Потаскуев И Мл МДНТП им. Ф. Э. Дзержинского. 1985, с.85−90.
- Модель синхронного двигателя с постоянными магнитами для прецизионных приборов текст. / Якунина С. В. // Известия вузов. Приборостр. 2004. 47, № 4, с.65−69.
- Многофункциональное использование датчика положения ротора вентильного двигателя текст.: материалы 2-ой Всесоюзной НТК по электро-механотронике. / М. А. Боровиков, В. И. Доманов, Е. М. Нашатыркин // СПб: ЛДНТП, 1991, с.28−30.
- Мордовченко Д.Д. Разработка и исследование бесконтактных момент-ных приводов с использованием микропроцессорной техники текст.: дис. канд. техн. наук. — СПб., 1995.
- Мустафа М. Н. Исследование вентильных двигателей со статической коррекцией характеристик для электроприводов малой мощности текст.: автореф. дис. канд. техн. наук. — Санкт-Петербург, 2001.
- Новицкий В.В., Кнорринг В. Г., Гутников B.C. Цифровые приборы с частотными датчиками текст. JL: Энергия, 1970.
- Овчинников И.Е. Вентильные электрические двигатели и привод на их основе (малая и средняя мощность): курс лекций текст. СПб.: КОРОНА-Век, 2007, 336с.
- Овчинников И.Е., Лебедев Н. И. Бесконтактные двигатели постоянного тока текст. — JL: Наука, 1979.
- Онищенко Г. Б. Электрический привод текст.: учеб. для студентов вузов. -М.: Издательский центр «Академия», 2006, 288с.
- Опыт применения цифровых процессоров обработки сигналов для управления электроприводом текст. / А. А. Гориловский, С. Г. Костенко,
- A.А.Кузнецов и др. JL: ЛДНТП, 1988.
- Осипов О.И., Иванов Г. М. Проблемы выбора и внедрения регулируемого электропривода текст.: доклады научно-практического семинара «Регулируемый электропривод. Опыт и перспективы применения». М.: Издательство МЭИ. 2006. с.36−47
- Особенности передаточной функции магнитоэлектрических вентильных электродвигателей текст. / А. М. Алексеев, И. А. Жердев, Н. И. Мелихов и др. // Применение постоянных магнитов в электромеханических системах: Межвуз. сб. трудов. М.: МЭИ, 1984. С. 68−75.
- Особенности проектирования вентильных электродвигателей с высоким быстродействием текст. / Ю. М. Беленький, Г. Б. Михайлов,
- B.В.Омельченко и др. // Совершенствование электрических машин и преобразователей на базе применения микропроцессорной и электронной техники. Л.: ЛДНТП, 1989. С. 62−66.
- Оценка влияния остаточного момента и пульсаций момента бесконтактного двигателя на точность работы следящей системы гиростаби-лизатора текст. / Журавлев Л. Д., Орлов М. В., Чежин М. С. // Мехатроника, автоматизация, управление. 2004, № 2, с.27−31.
- Параметрический синтез цифровых систем управления с широтно-импульсными преобразователями текст. / Кротенко В. В. // Изв. Вузов. Приборостр. 2004. 47, № 11, с.31−38.
- Перспективы развития и применения бесконтактных регулируемых электродвигателей текст. / Сидельников Б. В. // Изв. Вузов. Электромех. 2005, № 2, с. 14−20.
- Поздеев А.Д., Игошин Е. А. Ограничения влияния квантования по уровню в цифровых электроприводах текст.: труды межвуз. сб. «Исследование систем автоматизированных электроприводов». — Изд-во Чуваш. Ун-та, Чебоксары, 1991, с. 4−14.
- Применение сервоприводов в упаковочном оборудовании текст. / Татаринцев Н.// СТА: Современные технологии и автоматизация. 2004, № 1, с.32−35.
- Прохорский А.А. Основы автоматики и телемеханики текст. М., «Высшая школа», 1977.
- Разработка и калибровка преобразователей угла с микропроцессорной автокоррекцией текст. / Е. Д. Бохман, Ю. В. Филатов, Д. П. Лукьянов, А. В. Миронов, П. А. Павлов, В. Д. Аксененко, И. Е. Гутнер. // Гироскопия и навигация, № 4(51), 2005, с.72−82
- Самохвалов Д.В. Математическая модель электропривода с вентильным двигателем и цифровой коррекцией статических характеристик текст. / «Известия вузов. Электромеханика». — № 4, — 2009, сс.70−76
- Самохвалов Д.В. Об учете квантования сигналов микроконтроллера в методике проектирования усилительно-преобразовательного устройства вентильного двигателя текст. / Известия СПбГЭТУ «ЛЭТИ». № 9, 2008, с.33−44.
- Свечарник Д.В. Электрические машины непосредственного привода: Безредукторный электропривод текст. — М.: Энергоатомиздат, 1988.
- Сиберт У.М. Цепи, сигналы, системы: В 2-х ч. Ч. 1 текст.: Пер. с англ. -М.: Мир, 1988.
- Синтез цифрового регулятора подчиненной структуры электропривода в пакете Simulink текст. / Герман-Галкин С.Г., Кротенко В. В. // Ех-ponenta Pro. Mam. В прил. 2004, № 2, с.52−56.
- Синхронный вентильный электропривод текст. / Кропачев Г. Ф., Амирова С. С., Тумаева Е. В., Макаров В. Г., Сашинский И. И. // Привод. Техн. 2003, № 3, с.47−51.
- Системы управления электроприводов текст.: уч. пособие. / Усынин Ю. С. // 2. перераб., доп. изд. Челябинск: Изд-во ЮУрГУ. 2004, 328с.
- Соколовский Г. Г., Постников Ю. В., Егоров В. А. Математическая модель бесконтактного моментного привода текст. // Известия ЛЭТИ. Сборник научных трудов. Выпуск 416. Л., 1989. с.45−50.
- Соколовский Г. Г. Электроприводы переменного тока с частотным регулированием текст.: учебник для студ. вузов / Г. Г. Соколовский — М.: Издательский центр «Академия», 2006. 272с.
- Соловов В.Я. Осциллографические измерения текст. // Изд. 2-е, пе-рераб. и доп., М., «Энергия», 1975.
- Столов Л.И., Афанасьев А. Ю. Моментные двигатели постоянного тока текст. -М.: Энергоатомиздат, 1989.
- Терехов В.М. Системы управления электроприводов текст.: учебник для студентов вузов / В. М. Терехов, О.И.Осипов- под ред. В. М. Терехова 2-е изд., стер. — М.: Издательский центр «Академия», 2006. 304с.
- Тихоцкий П.А. Системы цифрового управления электроприводами переменного тока с косвенным измерением переменных текст.: Авто-реф. дисс. канд. техн. наук. — Москва. — 2002. ^
- Тулупов П.В. Вентильный двигатель с постоянными магнитами текст.: Автореф. дисс. канд. техн. наук: 05.09.01. Самара, 2001.-19 с.
- Тумаева Е.В. Синхронный электропривод с оптимальными режимами работы текст.: Автореф. дисс. канд. техн. наук. — Казань., 2006.
- Туманов М.П. Теория импульсных, дискретных и нелинейных САУ текст.: учеб. пособие. МГИЭМ. М., 2005, 63 с.
- Фалеев М. В., Киселев А. А. Особенности применения вентильных двигателей в широкорегулируемых электроприводах текст. Вестн.1. ИГЭУ. 2001, N2, с. 37−41
- Федоров С.В. Разработка и исследование адаптивного следящего электропривода с вентильным двигателем : Дис. канд. техн. наук/ С. В. Федоров // СПбГЭТУ. СПб.: ГЭТУ, 1996.-176 с.
- Фишбейн В.Г. Расчет систем подчиненного регулирования вентильного электропривода постоянного тока текст. — М.: Энергия, 1972 г. — 134с., ил.
- Фритч В. Применение микропроцессоров в системах управления текст.: Пер. с нем. М.: Мир, 1984.
- Холленд Р. Микропроцессоры и операционные системы текст.: справочное пособие: Пер. с англ. -М.: Энергоатомиздат, 1991.
- Хрущев В.В. Электрические машины систем автоматики текст. — М.: Энергоатомиздат, 1985.
- Цаценкин В.К. Безредукторный автоматизированный электропривод с вентильными двигателями текст. М.: Изд-во МЭИ, 1991.
- Цвенгер И.Г. Система точного задания и поддержания мгновенной скорости вращения с вентильным двигателем текст.: автореф. канд. техн. наук. — Казань., 1997.
- Цифровой следящий электропривод высокоточных лазерных станций координатных измерений текст. / Балковой А. П., Бугаев Ю. Н., Суе-тенко А.В., Цаценкин В. К. //Электричество. 2004, № 5, с. 3743.
- Цифровые электроприводы с транзисторными преобразователями текст. / С.Г.Герман-Галкин, В. Д. Лебедев, Б. А. Марков, Н. И. Чичерин. Л.: Энергоатомиздат. Ленингр. отд-ние, 1986. 248с.
- Цифровые электромеханические системы текст. / В. Г. Коган, Ю. Д. Бери, Б. И. Ашемов, А. А. Хрычев. -М.: Энергоатомиздат, 1985.
- Чемоданов Б. К.(ред.). Следящие приводы текст. //Т. 1. Теория и проектирование следящих приводов. 2. доп., перераб. изд. М.: Изд-во МГТУ. 1999, 903 с.
- Чиликин М.Г., Ключев В. И., Сандлер А. В. Теория автоматизированного электропривода текст. — М.: Энергия, 1979.
- Шенфельд Р., Хабигер Э. Автоматизированные электроприводы текст. / Пер. с нем.- Под ред. Ю. А. Борцова. М.: Энергоатомиздат, 1985.
- Шрейнер Р.Т. Математическое моделирование электроприводов переменного тока с полупроводниковыми преобразователями частоты текст./Р.Т.Шрейнер. Екатеринбург: УРО РАН, 2000. 654с.
- Электродвигатели бесконтактные моментные с постоянными магнитами текст.: Методические указания по применению: РД 16.480−88.
- Элементы моделей непрерывных и дискретных систем электроприводов текст.: учеб. пособие. / Залялеев С. Р. Красноярск: ИТТТТ КГТУ. 2003.
- Бесколлекторный двигатель текст.: А.с. 67 797 СССР / Д. В. Свечарник //Открытия. Изобретения. 1965. № 15.
- A Current Sensorless Drive System of a Synchronous Motor with a Low-Resolution Position Sensor. Shigeo Morimoto, Kenji Kinoshita, and Yoji Ta-keda. Electrical Engineering in Japan, Vol.14l, No.4, pp. 34−43, 2002
- A computer software for PID tuning by new frequency domain design method. T. Ch.S.Atchiraju, T.Nagraja. Computers and Electrical Engineering No. 29, pp.251 -257, 2003
- A design for improved performance of interior permanent magnet sym-chronous motor for hybrid electric vehicle. Seong Yeop Lim, Ju Lee. Journal of Applied Physics 99, 08R308, 2006
- A linear maximum torque per ampere control for IPMSM drives over full-speed range. Pan Ching-Tsai, Sue Shinn-Ming. IEEE Trans. Energy Con-vers. 2005. 20, N 2, c. 359−366
- A modular control scheme for PMSM speed control with pulsating torque minimization. Xu Jian-Xin, Panda S. K., Pan Ya-Jun, Lee Tong Heng, Lam В. H. IEEE Trans. Ind. Electron. 2004. 51, N 3, c. 526−536
- An MRAC-based nonlinear speed control of an interior PM synchronous motor with improved maximum torque operation. Kyeong-Hwa Kim. International Journal of Electronics, 2003, Vol.90, No.8, pp.481 -494
- A permanent-magnet synchronous motor servo drive using self-constructing fuzzy neural network controller. Lin Faa Jeng, Lin Chih-Hong. IEEE Trans. Energy Convers. 2004. 19, Nol. c.66−72.
- A review about trajectory control technics for interior permanent magnet synchronous motors. Ivonne Yznaga, He Yi Kang, Boris L. Coral. Energetica. VoI. XXVII, No.2−3/2006. pp.27−32.
- A Software Tools For Performance Evaluation Of Digital Control Algorithms On Finite Wordlength Processors. A. Patra and S.Mukopadhyay. Computers Elect Engng. Vol.22 No.6. pp. 403 419. 1996
- Automatic disturbances rejection controller for precise motion control of permanent-magnet synchronous motors. Su Y. X., Zheng С. H., Duan B. Y. IEEE Trans. Ind. Electron. 2005. 52, N 3, c. 814−823
- Blaschke, F. The principle of field orientation as applied the new TRANSVEKTOR closed loop control system for rotating field machines // Siemens Rev., 1972, Vol. 34, May. p. 217−220
- Bose B.K. Modern power electronics and AC drives / Prentice-Hall, USA, 2002
- Brushless Motors. Mechanical Engineering No 50. October 2007.
- Comparative study of finite word length effects in digital filter design via1. Л Лthe shift and delta transforms. M. B. NaumovicA, M. R. StojicA. Electrical Engineering 82 (2000) 213 216 6 Springer-Verlag 2000
- Design and implementation of a novel permanent magnet synchronous drive with a new PWM strategy. Int. J. Electronics, 1999, Vol. 86, No8, 10 131 029.
- Development and implementation of a hybrid intelligent controller for interior permanent-magnet synchronous motor drives. Uddin M. Nasir, Abido M.A., Rahman M. Azizur. IEEE Trans. Ind. Appl. 2004. 40, No 1, c.68−76.
- Development and testing of the torque control for the permanent-magnet synchronous motor. Nakai Hideo, Ohtani Hiroki, Satoh Eiji, Inaguma Yukio.
- EE Trans. Ind. Electron. 2005. 52, N 3, c. 800−806
- High-density permanent magnet machines. Atsushi Ikariga, Hiroyasu Shi-moji, Takashi Todaka and Masato Enokizono. International Journal of Applied Electromagnetics and Mechanics 25 (2007)
- High-performance speed measurement by suppression of systematic re-solver and encoder errors. IEEE Trans. Ind. Electron. 2004. 51, No 1, c.49
- High Performance Torque Control of Brushless DC Motor Drive Based on TMS320LF2407 DSP Controller. A. Vahedi, H. Monghbeli, A. Halvaei Niasar. International Review of Electrical Engineering (I.R.E.E.). Vol. 2, N.3 May June 2007.
- Krause P.C. Analisis of electric machinery. McGraw-Hill, New York, USA, 1986.
- Leonhard W. Control of Electrical Drives, 3rd edition. Springer-Verlag New York, Inc., 2001. c.470.
- Mechanical-sensorless robust control of permanent-magnet synchronous motor using phase information of harmonic reactive power. IEEE Trans. Ind. Appl. 2001. 37, N 6, c. 1786−1792
- Microcontrollers. C166 Family. 16-Bit Single-Chip Microcontroller C164. V 2.0, User’s Manual. // Infineon Technologies, 1999−09
- Miller, T.J.E., Brushless Permanent Magnet and Reluctance Motor Drives. Oxford Science Publications, UK, 1989.
- Morimoto, S., Hatanaka, K., Tong, Y., Takeda, Y., and Hirasa, T. Servo drive system and control characteristics of salient pole permanent magnet synchronous motor. IEEE Transactions on Industry Applications, 29, 1993, 338 343.
- Modeling and High-Performance control of electric machines. / J.Chiasson. // IEEE Press Series on Power Eng. 2005. J. Wiley&Sons Inc., Hoboken, New Jersey
- New Design for High-Performance Drive System for DC Brushless Motor. Yuzo Itoh, Yoshitaka Naitoh and Takeshi Tsuchiya. Electrical Engineering in Japan, Vol.114,No.3, pp. 134−147, 1994.
- Nonlinear speed control for a PM synchronous motor with a sequential parameter auto-tuning algorithm. K.-H. Kim. IEE Proc. Electr. Power Appl., Vol. 152, No. 5, September 2005, pp. 1253−1262
- Optimal efficiency control strategy for interior permanent-magnet synchronous motor drives. Mademlis Christos, Kioskeridis Iordanis, Margaris Nikos. IEEE Trans. Energy Convers. 2004. 19, N 4, c. 715−723
- Ogata К. Discrete-time control systems, Prentice-Hall, 1987.
- Precise speed control of a permanent magnet synchronous motor. Chung-Feng Jeffrey Kuo, Chih-Hui Hsu. Int. J. Adv. Manuf. Technol. 2006. N. 28. Pp.942−949.
- Problems associated with the direct torque control of an interior permanent magnet synchronous motor and their remedies. Rahman Muhammed Fazlur, Haque Enamul, Tang Lixin, Zhong Limin. IEEE Trans. Ind. Electron. 2004. 51, No 4. c.799−809.
- Pulse Width Modulation For Power Converters. Principles and Practice. D. Grahame Holmes, Thomas Lipo. IEEE Series on Power Engineering, IEEE Press, 2003.
- System and method for controlling brushless permanent magnet motors.
- Пат. 6 002 234 США, МПК 6 H 02 P 1/24. Kollmorgen Corp., Ohm Dal Y., Chava Vankatesh В. N 09/37 263- Заявл. 09.03.1998- Опубл. 14.12.1999-
- The effect of the voltage induced by rotation on the functioning of the D.C. motors with permanent magnet and static commutation. Bui. Inst, politehn. Iasi. Electrotehn., energ., electron. 1999. 45, N 1−2, c. 135−142
- Vas P. Sensorless Vector and Direct Torque Control. // Clarendon Press: Oxford, 1998
- Yaniv О. 1, Theodor Y., Safonov S. High Order Control design Advantage Over PI And РГО Controllers Ference. // Copyright © 2001 Elmo Position Control.198. 8XC196MC, 8XC196MD, 8XC196MH Microcontroller User’s Manual. //1.tel Corporation, 2004
- Завод Машиноаппарат. Электродвигатели серии ДБМ. (http://mashap.maverick.ru/rus/eeng.html)
- Специализированные контроллеры для управления электроприводами: состояние и перспективы. / Ганнель JI.B., «CONTROL ENGINEERING РОССИЯ», Июнь-июль 2007http ://www. controlengrus sia. com/j un07−12 .php4?num=)
- Широтно-импульсная модуляция в электроприводе переменного тока./ С. М. Пересада, С. В. Король (http://www.el-drive.com.ua/pdf-unityell.pdf)
- Электроприводы. Термины и определения. ГОСТ Р 50 369−92. — Москва: Госстандарт России. http:// www.gostrf.com/ standart/Pagesgost/10 041 .htm)
- AC Motor Control Using the ADMC200 Coprocessor. / A. Murray, P. Kettle. // AN-408 APPLICATION NOTEhttp://www.adaptyv.com/doc/analog/acmotorcontrolan408.pdf)
- What is 'Field Oriented Control' and what good is it? http://www.copleycontrols.com/motion/downloads/pdf/Field-Oriented-Control.pdf)
- Investigating Servo Architectures- Pros and Cons. http://www.worldservo.com/html/arc.htm)
- DSP and Motion Control. / Don Morgan (http://www.embedded.eom/2000/0006/0006spectra.htm). .
- Control Requirements for High-precision, High-speed Machining. / Curtis S. Wilson. // Delta Tau Data Systems, Inc. Northridge, California. (http://www.deltatau.com/common/support/whitepapers/High%20Speed%20Mach ining. pdf)
- Servo System Speed Regulation. Danaher Corporation. (http://danahermotion.com/website/com/eng/download/document/servosysspeedre g. pdf)