Устройство и принцип действия шагового двигателя
Как видно на рис. 5.73, воздушные зазоры у верхнего и нижнего полюсного наконечника ротора разные. Это достигается благодаря повороту полюсных наконечников на половину шага зубьев. Поэтому существует другая магнитная цепь, которая содержит минимальные воздушные зазоры и обладает минимальным магнитным сопротивлением. По этой цепи замыкается другая часть потока постоянного магнита (на рисунке… Читать ещё >
Устройство и принцип действия шагового двигателя (реферат, курсовая, диплом, контрольная)
Шаговый двигатель имеет неподвижный статор и вращающийся ротор. На статоре ШД располагаются обмотки, ротор, как правило, не имеет обмоток.
В шаговом двигателе вращающий момент создается взаимодействием магнитных потоков статора и ротора. Статор изготовлен из материала с высокой магнитной проницаемостью и имеет несколько магнитных полюсов. Магнитный полюс — это область намагниченного тела, где магнитное поле сконцентрировано. Магнитные полюса имеют как статор, так и ротор. Для уменьшения потерь на вихревые токи магнитопроводы статора и ротора собраны из отдельных пластин. Вращающий момент ШД пропорционален величине магнитодвижущей силы поля статора, которая пропорциональна току в обмотке и количеству ее витков. Если хотя бы одна обмотка шагового двигателя имеет питание, ротор принимает определенное положение. Он будет находиться в этом положении до тех пор, пока внешний приложенный момент (момент сопротивления) не превысит некоторого значения, называемого моментом удержания. В последнем случае ротор повернется, и будет находиться в одном из следующих положений равновесия.
Двигатели с переменным магнитным сопротивлением, или реактивные двигатели.
Эти двигатели на статоре и роторе имеют несколько полюсов зубчатой формы из магнитомягкого материала (рис. 5.71). Намагниченность ротора отсутствует. Для простоты на ротор имеет 4 зубца, а статор — 6 полюсов. Двигатель имеет 3 независимые обмотки, каждая из которых расположена на двух противоположных полюсах статора.
Рис. 5.71. Конструкция двигателя с переменным магнитным сопротивлением (поперечный разрез)

Такой двигатель имеет шаг поворота ротора 30°.
При подаче тока в одну из катушек, создаётся магнитное поле статора и ротор стремится занять положение, когда магнитный поток замкнут по пути с минимальным магнитным сопротивлением, т. е. ротор повернётся так, что его зубцы будут находиться напротив тех полюсов, обмотки которых обтекаются током. Если затем обесточить первую обмотку и подать ток в следующую, то ротор поменяет положение, переместившись на шаг и снова замкнув своими зубцами магнитный поток. Таким образом, чтобы осуществить непрерывное вращение ротора, нужно последовательно переключать фазы обмотки статора. Реальный ШД может иметь большое количество полюсов статора и зубцов ротора, что соответствует большему количеству шагов за оборот или шаг поворота ШД будет меньше. Часто поверхность каждого полюса статора выполняется зубчатой с большим количеством зубцов и при большом количестве зубцов ротора обеспечивается малое значение угла шага, порядка нескольких градусов. Двигатели с переменным магнитным сопротивлением применяются довольно редко, так как они имеют малый момент.
Двигатели с постоянными магнитами, или активные двигатели. Эти двигатели состоят из статора, который имеет обмотки, и ротора, включающего постоянные магниты (рис. 5.72). Постоянные магниты имеют прямолинейную форму и расположены параллельно оси двигателя. Благодаря магнитному потоку, который создают постоянные магниты, в таких двигателях обеспечивается больший суммарный магнитный поток двигателя и, как следствие, больший момент, чем у двигателей с переменным магнитным сопротивлением.
Представленный на рисунке шаговый двигатель имеет 3 пары полюсов ротора и 2 пары полюсов статора. Двигатель имеет две независимые обмотки, А и В (рис. 5.72), каждая из которых расположена на двух противоположных полюсах статора. Двигатель, имеет величину шага поворота ротора 30°. При подаче тока в одну из катушек статора, ротор стремится занять положение, при котором разноименные магнитные полюса ротора и статора находятся друг против друга. Для осуществления непрерывного вращения нужно последовательно подавать попеременно ток в фазы обмотки.


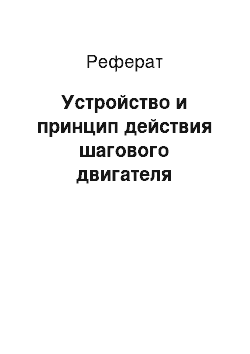
Рис. 5.73. Конструкция гибридного шагового двигателя: поперечный разрез — а; продольный разрез — б; 1 — вал; 2 — статор; 3 — обмотка статора; 4 — постоянный магнит ротора; 5 — зубчатые полюсные наконечники.
Рис. 5.72. Конструкция шагового двигателя с постоянными магнитами: поперечный разрез — а общий вид -б; 1 — ротор; 2 — вал; 3 — обмотка А; 4 — обмотка В; 5 — чашка статора А; 6 — чашка статора В статора. На практике ШД с постоянными магнитами имеют значительно большее число пар полюсов, что обеспечивает угол шага 7,5−35°.
Конструкция шагового двигателя с постоянными магнитами показана на рис. 5.72,6. Магнитопровод статора выполнен в виде штампованного стакана с полюсными наконечниками в виде ламелей. Обмотки фаз статора, А и В размещены на двух разных магнитопроводах, которые установлены друг на друге.
Ротор представляет собой цилиндрический многополюсный постоянный магнит. С торцов обмотки фаз статора крепятся с помощью чашек статора, А и В.
Гибридные двигатели. В этих двигателях отражены лучшие свойства двигателей с переменным магнитным сопротивлением и двигателей с постоянными магнитами. На рис. 5.73 представлен вариант конструкции гибридного ШД. Ротор гибридного двигателя имеет зубцы, расположенные в осевом направлении, и включает постоянные магниты.
Ротор разделен на две части, между которыми расположен цилиндрический постоянный магнит.
Зубцы верхней половинки ротора являются северными полюсами, а зубцы нижней половинки — южными. Кроме того, верхняя и нижняя половинки ротора повернуты друг относительно друга на половину угла шага зубцов ротора. Число пар полюсов ротора равно количеству зубцов на одной из его половинок. Зубчатые полюсные наконечники ротора, как и статор, набраны из отдельных пластин для уменьшения потерь на вихревые токи.
Статор гибридного двигателя также имеет зубцы, обеспечивая большое количество эквивалентных полюсов, в отличие от основных полюсов, на которых расположены обмотки. Обычно используются 4 основных полюса для двигателей с шагом 3,6° и 8 основных полюсов для двигателей с шагом 1,8° и 0,9°. Зубцы ротора обеспечивают меньшее сопротивление магнитной цепи в определенных положениях ротора, что улучшает статический и динамический моменты. Это обеспечивается соответствующим расположением зубцов, когда часть зубцов ротора находится строго напротив зубцов статора, а часть между ними. Зависимость между числом полюсов ротора, числом эквивалентных полюсов статора и числом фаз определяет угол шага 5 двигателя:

где р — число эквивалентных полюсов на фазу, равное числу полюсов ротора; И — число фаз; N = р-Ь — полное число полюсов для всех фаз шд.
Ротор двигателя (рис. 5.73) имеет 100 полюсов (50 пар), статор имеет 2 фазы, поэтому полное количество полюсов — 200, а шаг, соответственно, 1,8°. На рис. 5.73,я представлено продольное сечение гибридного шагового двигателя. Стрелками показано направление магнитного потока постоянного магнита ротора. Часть потока (на рис. 5.73,6 показана чёрной линией) проходит через полюсные наконечники ротора, воздушные зазоры и полюсный наконечник статора и не участвует в создании вращающего момента.
Как видно на рис. 5.73, воздушные зазоры у верхнего и нижнего полюсного наконечника ротора разные. Это достигается благодаря повороту полюсных наконечников на половину шага зубьев. Поэтому существует другая магнитная цепь, которая содержит минимальные воздушные зазоры и обладает минимальным магнитным сопротивлением. По этой цепи замыкается другая часть потока постоянного магнита (на рисунке показана светлой штриховой линией), которая взаимодействует с магнитным потоком обмотки статора и создаёт вращающий момент ШД. Часть этой магнитной цепи находится в плоскости, перпендикулярной рисунку, и поэтому не показана. В этой же плоскости создают магнитный поток катушки статора, который частично замыкается полюсными наконечниками ротора.
Величина зазора между зубцами ротора и статора небольшая — обычно 0,1 мм. Это требует высокой точности при сборке, поэтому шаговый двигатель не разбирают.
Чтобы магнитный поток не замыкался через вал, который проходит внутри магнита, его изготавливают из немагнитных марок стали, которые обладают повышенной хрупкостью.
Для получения больших вращающих моментов ШД увеличивают магнитную индукцию магнитного поля, создаваемого статором, и индукцию поля постоянного магнита. При этом требуется больший диаметр ротора, что увеличивает момент инерции ШД. Поэтому мощные шаговые двигатели иногда конструктивно выполняют из нескольких секций в виде этажерки. В этом случае крутящий момент и момент инерции увеличиваются пропорционально количеству секций, а их отношение не ухудшается.
Большинство современных шаговых двигателей являются гибридными, которые являются двигателем с постоянными магнитами, но с большим числом полюсов статора и ротора. Далее рассматриваются только гибридные двигатели. Чаще всего на практике двигатели имеют 100 или 200 шагов на оборот, соответственно угол шага равен 3,6° или 1,8°.