Пояснение к расчету вечного двигателя
При перемещении ленты на шаг t, повторится начальное расположение грузиков, то есть имеет место периодическое перемещение грузиков из исходного положения в следующее исходное положение. Поэтому, чтобы определить наличие тяги, достаточно рассчитать сумму проекций центробежных сил на ось Y полуокружностей (и) всех шкивов в исходном и промежуточных положениях, шага t, при необходимости построить… Читать ещё >
Пояснение к расчету вечного двигателя (реферат, курсовая, диплом, контрольная)
Анализируя различные явления, я пришел к убеждению в существовании инерциоида, а затем и вечного двигателя. Решил написать статью. В первую очередь составил таблицы расчетов (наиболее трудоемкая часть работы), а затем текст.
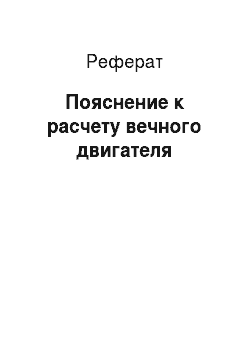
Таблица 2 не проходила по ширине страницы, поэтому часть столбцов была удалена, и в дальнейшем не был восстановлен столбец с приведенной суммой множителей, что привело к ошибке вычисления величины усредненного момента силы.
Приведение сумм множителей к единой горизонтальной оси выполнено следующим образом. Мысленно установлен редуктор с отношением 9:1 между большим шкивом и малыми шкивами.
То есть, для сравнения необходимо в 9 раз уменьшить сумму множителей R99 или увеличить сумму множителей R11. Принято увеличение. Аналогичный результат будет и в случае приведения сил действующих на ленту.
Изменяемая часть и последующий текст даны ниже:
Разность сумм множителей за шаг t: 23,051 мм, что в пересчете на расчетный шаг составит 2,3051 мм. Вращение по часовой стрелке.
Усредненный момент силы от действия грузиков на шкивы:

2,3051,.


где: вес одного грузика, н; множитель 2,3051- мм.
Для усреднения момента силы, устанавливается 10 передач с шагом 0,1t.
Влияние ленты можно оценить по моменту инерции,.

При одинаковой длине ленты, момент инерции на шкиве R99 будет больше, но угловое ускорение меньше. То есть моменты сил, препятствующие вращению, будут различаться незначительно.
Конец изменяемого текста.
Оценить полученный результат можно предположив, что грузики имеют форму гантелей весом 10 Г и закреплены на ленте или цепочке. В данном случае момент силы составит 23,051 Г, мм, при суммарном весе грузиков 500 Г. В указанном сочетании размеров и сил большое значение будет иметь шероховатость рабочих поверхностей, пыль, грязь, потери на изгиб ленты и точность выполнения размеров. Но если размеры увеличить в десять раз, то при суммарном весе грузиков 500 кГ, момент силы составит 23,051 кГ,см, что даст возможность более точно определить потери.
В случае увеличения расстояния между грузиками в два раза (20 градусов по R99), получим снижение суммарного веса грузиков до 250 кГ и увеличение момента силы до 46,2 кГ,см. При увеличении расстояния в четыре раза (40 градусов по R99), получим суммарный вес 130 кГ и момент силы 92,8 кГ,см. Этого достаточно чтобы преодолеть противодействующие силы, но не следует сразу приступать к конструированию вечного двигателя, стоит осуществить поиск более эффективных схем, как это сказано в статье.
О точности расчетов. При подъеме грузика весом 1 Г на высоту 100 мм по вертикали, работа составляет 100 Г.мм. При движении грузика от 0 до 90 градусов по окружности радиусом 100 мм, и фиксации проекций с шагом 5 градусов, работа будет 99,936 Г.мм.
В примерах статьи расчетный шаг по большому шкиву составляет от 1 до 4 градусов, то есть точность вполне достаточная для принятия решения.
В последние годы возрос интерес к безопорному движению, при этом из обсуждения выпали образцы с переменным моментом инерции:
- — изменением радиуса орбиты (журнал «Знание-сила», 60-е годы;
- — изменением массы (журнал «Изобретатель и рационализатор», 70−80-е годы).
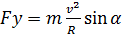
Чтобы выяснить, возможно, ли получить тягу при движении различного количества тел по полуокружностям различной кривизны, рассмотрим ленточную передачу, на ленте которой равномерно расположены грузики, (рисунок 1). Лента с грузиками обегает шкивы различного диаметра с постоянной линейной скоростью. Натяжение ленты принято достаточным для передачи центробежной силы на шкивы. Шкивы установлены в корпусе и центробежные силы, возникающие при вращении грузиков на шкивах по цепочке связей: лента — шкив — вал, взаимодействуют через корпус. Приведенным расчетом учтены силы по оси Y, силы по оси X компенсируются установкой аналогичного устройства противоположного направления вращения. Обегая шкивы различного диаметра с постоянной линейной скоростью, грузики проходят одинаковые расстояния по дугам, но различные по углам. Размеры даны по средней линии ленты. Радиус траектории малого шкива принят 10 мм, шаг расположения грузиков: Радиус траектории большого шкива:

=80мм.


При перемещении ленты на шаг t, повторится начальное расположение грузиков, то есть имеет место периодическое перемещение грузиков из исходного положения в следующее исходное положение. Поэтому, чтобы определить наличие тяги, достаточно рассчитать сумму проекций центробежных сил на ось Y полуокружностей (и) всех шкивов в исходном и промежуточных положениях, шага t, при необходимости построить график, и определить наличие тяги. Расчет выполнен через 0,1 шага t: малый шкивбольшой-2,25.



На рисунке показан момент фиксации исходного положения, при этом в точках пересечения элементов траекторий, для исключения двойного счета, числовые значения отнесены к входящей траектории (проекция 0 на ось Y отсутствует).
Расчет произведен упрощенно по следующей схеме:



Набегающая ветвь: грузик на оси X — 0. Далее полуокружность R80;: увеличение угла расположения грузика по часовой стрелке от 2,25 до 180 Далее полуокружность R10; увеличение угла против часовой стрелки от 18 до 180 Для удобства расчета мысленно отражаем зеркально и ведем расчет по часовой стрелке, учитывая знак. Далее полуокружность R10; увеличение угла по часовой стрелке от 18 до 180 и так далее. То есть введена плавающая схема расчета по полуокружностям (и), которая позволила унифицировать расчет и упростить понимание сути.
Центробежная сила равна.

.
где m — масса, R — радиус кривизны траектории и.
v — линейная скорость.
Проекцию центробежной силы на ось Y:

и вычислим сумму проекций ЦБС на ось Y большого шкива в начальный момент. При этом, одинаковые для всех грузиков m и v выносим за скобки:

).


На траектории малого шкива имеется один грузик:


где принимает значения через 0,1t: 18. В случае наличия одинаковых полуокружностей, результат умножается на n. Показанный прием позволяет оценить наличие тяги, не приступая к конкретизации конструкции устройства (не определять m и v).

Расчет разности сумм множителей: n? sinб/R и n? sinб/R сведен в таблицу 1.
Чтобы не перегружать таблицы и рисунки числами, результаты вычислений округлены до 0,001 значения.

Рисунок 1.
Таблица 1.
шаг. |  R. м. | б градус. |
| n. шт. | n?sinб/R 1/м. |
|
0t. |   
|
|
|
|
| 251,367. |
0,1t. |
|
|
|
|
| 129,529. |
0,2t. |
|
|
|
|
| 19,401. |
0,3t. |
|
|
|
|
| 68,105. |
0,4t. |
|
|
|
|
| 124,329. |
0,5t. |
|
|
|
|
| 143,708. |
0,6t. |
|
|
|
|
| 124,329. |
0,7t. |
|
|
|
|
| 68,105. |
0,8t. |
|
|
|
|
| 19,401. |
0,9t. |
|
|
|
|
| 129,529. |
Итого: |  
|
Разность сумм множителей n? sinб/R и: n? sinб/R, на шаг t, равна 20,651 1/м. Тяга направлена по Y+. Усредненная тяга в пересчете на 0,1 шага t: где: m — масса одного грузика, кг; v — м/сек; множитель 2,0651- 1/м.

Усреднение тяги достигается установкой 10 передач с шагом 0,1t, компенсация момента вращения достигается установкой блока передач противоположного направления вращения, при этом, соответственно, в 20 раз увеличивается и тяга.
По аналогии с ременной передачей, на ленту действует центробежная сила.



где: — площадь сечения, — плотность материала, — скорость. При одинаковом количестве полуокружностей, силы, отбрасывающие ленту, будут равны и не окажут влияния на результат.


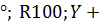
При повороте передачи на, получится устройство для выявления разности моментов сил, приложенных к шкивам в состоянии покоя, рисунок 2.

Примечание: поскольку моменты сил всех малых шкивов, противодействуют суммарному моменту силы большого шкива, все малые полуокружности обозначены Х.
Натяжение ленты принято достаточным для удержания грузиков на шкивах. Радиус траектории малого шкива принят 11 мм, шаг расположения грузиков:

Радиус траектории большого шкива:

=99мм.
Расстояние от оси вращения до прямой, вдоль которой действует сила тяжести:

.

Для определения разности моментов сил, необходимо рассчитать и сравнить суммарные моменты по большому шкиву и цепочке из малых шкивов. Расчет выполнен через 0,1 шага t: малый шкив-, большой-1.


Расчет разности сумм множителей R99мм: и R11мм: n сведен в таблицу 2.

Рисунок 2.
Таблица 2.
шаг. | R. мм. | в градус. | R?sinв мм. | n. шт. | nR?sinв мм. | ? n R? мм. |
0t. |
|
|
|
|
| 1032,575. |
0,1t. |
|
|
|
|
| 1019,862. |
0,2t. |
|
|
|
|
| 1009,594. |
0,3t. |
|
|
|
|
| 1002,051. |
0,4t. |
|
|
|
|
| 997,441. |
0,5t. |
|
|
|
|
| 995,890. |
0,6t. |
|
|
|
|
| 997,441. |
0,7t. |
|
|
|
|
| 1002,051. |
0,8t. |
|
|
|
|
| 1009,594. |
0,9t. |
|
|
|
|
| 1019,862. |
Итого: 10 086,362. |
Суммарный момент силы от действия грузиков на шкивы в пересчете 1000 мм = 1м:
10,86 362,.
вращение большого шкива по часовой стрелке.
Усредненный момент силы от действия грузиков на шкивы в пересчете на 0,1 периода. где: вес одного грузика, н; множители 10,86 362 и 1,86 362 — м.
Для усреднения момента силы, устанавливается 10 передач с шагом 0,1t.
Влияние ленты можно оценить по моменту инерции,.
(тонкостенный цилиндр).
При одинаковой длине ленты, момент инерции на шкиве R99 будет больше.
Чтобы выяснить, возможна, ли асимметрия при вращательном движении тел, представим себе ротор, на котором установлено 36 направляющих для перекатывания шариков. Направляющим присвоены номера по точке перехода с направляющей на внешнюю окружность: № 1−10 № 36−360 Направляющие разнесены вдоль вала, для исключения соприкосновения шариков. Получение траектории направляющей, по центру шарика, показано на рисунке 3. Исходное положение ротора на рисунке 4. Направляющая № 16 расположенная в положении165 показана на рисунке 4. При перемещении по направляющей, центр шарика повторяет окружность, на которой расположен центр окружности направляющей для качения шарика.

Установив ротор в исходное положение, можно сравнить моменты сил, приложенные к левой X и правой части траектории, и далее в промежуточных положениях, через 0,1 шага t.
Описание исходного положения ротора.
Примечание: В скобках даны позиции и обозначение на полуокружности.
Поворачивая ротор против часовой стрелки, проследим за перемещением центра шарика по направляющей № 36:
360 («0») шарик 12; R116,981; Y+, далее в течении 10 катится по радиусу R116,981. 350 (10; Y-) шарик 2; R116,981; Y+, далее 2 по радиусу R116,981, 3 по R503,739, совмещает свое положение с положением направляющей, и по радиусу R101,861 проходит 5 до следующего положения.

- 340 (20; Y-) и далее до 180, шарик остается в совмещенном положении.
- 180 («0») — шарик 180; «0», оставаясь на месте, катится в течении 10, в то время как направляющая перемещается в следующее положение.
- 170 (170; Y+) — шарик 180; «0», далее в течении 5 шарик катится по направляющей, фиксируется на направляющей и затем 5 по радиусу R101,861 доходит до положения 175; Y+, при этом направляющая перемещается в следующее положение.

160 (160; Y+) — шарик 175; Y+. В таком состоянии (разница 15осуществляется подъем до положения 90.

- 90 (90;Y+) — шарик 105 (105; Y+). При подъеме шарика до 100, он переходит на траекторию R101,069 и пройдя 5, доходит до положения 92, а направляющая до следующего положения.
- 80 (80; Y+) — шарик 92; R101,069, далее шарик поднимается до полжения 82

70 (70; Y+) — шарик 82; R101,069, далее на отметке 80 (R100)/ 77(R101,069) шарик переходит в фиксированное положение — R100 и поднимается в положение 75, а направляющая в следующее.

60 (60; Y+) — шарик 75R100; Y+; В таком состоянии (разница 15осуществляется подъем до положения 10.

10 (10; Y+) — шарик 25, далее поднимается до 20 и переходит на радиус.
R116,981, катится 5и вместе с направляющей достигают положения 360- шарик 12.
Суммарный момент силы от действия грузиков на полуокружность:
.
Расчет выполнен через 0,1шага t: 1 Расчет разности сумм множителей X: и X, сведен в таблицу 3. При этом в точках пересечения элементов направляющих с окружностью, числовые значения отнесены к окружности. Направление перемещения ротора в промежуточные положения принято по увеличению номера напраляющей. Последовательность расчета полуокружностей принята по изменению угла в от 0 до 180 поэтому проекция точек 0 и180 обозначены как «0».



Суммарный момент силы от действия грузиков на ротор за период t: 1,000 ,.
Усредненный момент силы от действия грузиков на ротор в пересчете на 0,1 периода:
0,100 ,.
где: — вес одного грузика, н; множитель 0,100 (0,999 897) — мм.
Рисунок 3.

Рисунок 4.

Оценить полученный результат можно сравнением с моментом трения движения шариков по направляющим. При движении, шарик отклоняется от вертикали на угол трения. Приняв угол устойчивого скатывания из состояния покоя: получаем момент трения на один усредненный ротор: н мм.


Таблица 3.
T. |  № нап равл. | R. мм. | в градус. | R?sinв мм. | ?R?sinв мм. | ? ?? мм. | |
|

|
|
|
|
| 5,264. | |
0,1. |
|
|
|
|
|
| 1,348. |
0,2. |
|
|
|
|
|
| 0,569. |
0,3. |
|
|
|
|
|
| 3,486. |
0,4. |
|
|
|
|
|
| 6,401. |
0,5. |
|
|
|
|
|
| 9,315. |
0,6. |
; |

|
|
|
|
| 3,699. |
0,7. |
; |
|
|
|
|
| 1,919. |
0,8. |
|
|
|
|
|
| 7,536. |
0,9. |
|
16; 17. |
|
|
|
| 6,401. |
Итого: X. | 
|
То есть, ротор будет в состоянии покоя. Но, если направляющие с шариками заменить пузырьковыми колбами, а на валу ротора установить емкости с водородом, исключив давление на опоры, то ротор, очевидно, начнет вращаться против часовой стрелки.
Усреднение момента силы достигается установкой 10 роторов с шагом 0,1 t
Изменением углов в: 3 и 17, можно добиться противоположного направления вращения, а так же изменения выделенного момента силы.
Приведенные примеры показывают, что инерциоид, вечный двигатель и асимметрия существуют и в ряде случаев можно произвести расчет и найти приемлемое решение.
В остальных случаях, по-видимому, требуется поэтапное экспериментирование. Это, в первую очередь, относится к инерциоиду, как вращающемуся телу с переменным моментом инерции, прототипами которого могут послужить устройства, упомянутые в начале статьи.
инерциоид двигатель центробежный ременной.