Методологические основы управления движением судна и конфигурацией зоны навигационной безопасности
По определению С. Г. Погосова: «Вокруг судна как на ходу, так и на стоянке всегда должно быть пространство, в пределах которого оно, приняв необходимые меры, может избежать непосредственного контакта с другими объектами, силовое взаимодействие с которыми чревато аварийными последствиями. Принцип рассмотрения положения на стесненной акватории не судна, а его ЗНБ, равно как взаимодействие зон… Читать ещё >
Содержание
- 1. МЕТОДОЛОГИЧЕСКИЕ ОСНОВЫ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА И КОНФИГУРАЦИЕЙ ЗОНЫ НАВИГАЦИОННОЙ БЕЗОПАСНОСТИ (ЗНБ)
- 1. 1. Методы постановки задач судовождения с применением ЗНБ
- 1. 2. Принципы построения систем управления движением судна и конфигурацией ЗНБ
- 1. 3. Методологические основы управления движением судна и конфигурацией ЗНБ
- 2. СИСТЕМЫ КООРДИНАТ И КИНЕМАТИЧЕСКИЕ ХАРАКТЕРИСТИКИ ДВИЖЕНИЯ СУДНА И КОНФИГУРАЦИИ ЗНБ ~
- 2. 1. Общие положения
- 2. 2. Системы координат движения судна и конфигурации ЗНБ
- 2. 3. Составляющие скоростей движения судна и ЗНБ
- 3. АНАЛИЗ КОНЦЕПЦИЙ ЗНБ В СУДОВОЖДЕНИИ
- 3. 1. Концепции ЗНБ для обеспечения безопасной навигации
- 3. 2. Концепции линейных и прямоугольных ЗНБ-С для предупреждения столкновения судов
- 3. 3. Концепции.круговых ЗНБ
- 3. 4. Концепции эллиптических ЗНБ
- 3. 5. Перспективные направления развития концепций ЗНБ
- 4. МЕТОДОЛОГИЧЕСКИЕ ОСНОВЫ КИНЕМАТИЧЕСКОЙ МОДЕЛИ ДВИЖЕНИЯ КОНФИГУРАЦИИ ЗНБ КАК СПЛОШНОЙ ДЕФОРМИРУЕМОЙ СРЕДЫ
- 4. 1. Обоснование концепции модели движения конфигурации ЗНБ как сплошной деформируемой среды
- 4. 2. Градиенты перемещения и деформации конфигурации ЗНБ
- 4. 3. Теория конечных линейных деформаций конфигурации ЗНБ
- — з
- 4. 4. Физический и геометрический смысл характеристик деформации конфигурации ЗНБ
- 4. 5. Распределение скоростей движения конфигурации судно-ЗНБ
- 5. МЕТОДОЛОГИЧЕСКИЕ ОСНОВЫ ДИНАМИКИ СУДНА И КОНФИГУРАЦИИ СПЛОШНОЙ ДЕФОРМИРУЕМОЙ СРЕДЫ ЗНБ
- 5. 1. Основные положения динамики судна и конфигурации сплошной деформируемой среды ЗНБ
- 5. 2. Динамическая модель движения судна и конфигурации сплошной деформируемой среды ЗНБ
- 5. 3. Определения реакций контакта конфигурации ЗНБ с ограждающими линиями или опасностями
- 5. 4. Декомпозиция (разделение) процессов управления движением судна и конфигурацией ЗНБ
- 6. УПРАВЛЕНИЕ ДВИЖЕНИЕМ СУДНА И КОНФИГУРАЦИЕЙ ЗНБ ПО ЗАДАННОЙ ТРАЕКТОРИИ МЕТОДАМИ ОБРАТНЫХ ЗАДАЧ ДИНАМИКИ
- 6. 1. Управление угловой скоростью поворота судна
- 6. 2. Управление углом поворота судна
- 6. 3. Управление движением центра тяжести судна
- 6. 4. Управление движением конфигурации ЗНБ
- 6. 5. Моделирование алгоритмов управления движением судна и конфигурацией ЗНБ
- 7. АНАЛИТИЧЕСКОЕ КОНСТРУИРОВАНИЕ ОПТИМАЛЬНОГО АДАПТИВНОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА И КОНФИГУРАЦИЕЙ ЗНБ
- 7. 1. Принципы оптимального адаптивного управления
- 7. 2. Оптимальное управление судном и конфигурацией ЗНБ с прогнозирующей моделью
- 7. 3. Оптимальное адаптивное управление судном и конфигурацией
- ЗНБ с прогнозирующей моделью
Методологические основы управления движением судна и конфигурацией зоны навигационной безопасности (реферат, курсовая, диплом, контрольная)
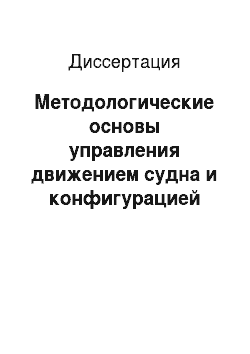
Одной из важнейших проблем морского флота является обеспечение безопасности мореплавания. Необходимость решения этой проблемы обусловлена высоким уровнем аварийности мирового морского флота. Обобщение статистики по результатам анализов аварийности и гибели судов мирового флота, проводимых В. К. Залеевым, В. А. Колокшанским, В. И. Щеголевым, А. П. Яскевичем и др., свидетельствует о том, что около 60 — 70% всех аварий морских судов составляют навигационные и тенденция их снижения за последние 30 лет наблюдается незначительной, а такие виды аварийности судов как столкновения и навалы остаются практически постоянными рис. 1 (ГМФ — гидрометеорологические факторы).
Решение задач навигационного обеспечения безопасности плавания крупнотоннажных судов, особенно в стесненных условиях, находится в прямой зависимости от функциональных возможностей системы управления и умения судоводителей выбирать эффективную организацию процессов планирования маршрута, прогнозирования траектории движения и маневрирования судна.
Научно-технические достижения последних десятилетий качественно меняют подходы к решению задач судовождения и позволяют перейти к автоматизированному информационному обеспечению о координатах судна, обстановке и других элементах движения [10, 18, 36, 134, 143, 163, 178, 198, 203, 207, 214]. Причем, информационное обеспечение обладает свойствами дублирования и избыточности от различных систем, что не используется в полном объеме для обеспечения безопасности мореплавания при традиционных «ручных» методах управления судном, так и в системах автоматизации судовождения. л4.
СП.
1961 1963 1965 1967 1969 1971 1973 1975 1977 1979 1981 1983 1985 Год.
Рис. 1. Статистика потерь мирового флота по видам навигационных аварий.
Этот недостаток может быть устранен, а избыточность информации наилучшим образом использована при автоматизации процессов управления движением судна на основе новых технологий в классе адаптивных и интеллектуальных систем. Такие системы обладают качественно новым уровнем функционирования и позволяют обобщить опыт и умения судоводителей и более быстро передавать их молодым специалистам.
Одним из перспективных путей разработки адаптивных систем управления и реализации требований по обеспечению безопасности плавания в условиях неопределенности движения судна и внешней среды можно выделить применение методов связанных с определением и формализацией свободного пространства вокруг судна — зоны навигационной безопасности (ЗНБ).
В 60-х годах в исследованиях профессора А. И. Родионова [207] предложены различные варианты «зон возможности маневра», «трехмерных областей распределения маневра», а японским преподавателем Y. Fujii [279, 280] - концепция и модель «территории судна» (a ship domains), которые являются прообразами ЗНБ.
В 70−80-х годах английские исследователи E.M.Goodwin, T.G.Coldwell и другие усовершенствовали теорию «ship domains», определяя форму и параметры ЗНБ для типовых ситуаций и районов плавания [273, 284, 285].
В 1986 году австралийским профессором M.K.James [291, 292] применена концепция «теории нечетких множеств», дальнейшее развитие которой в Даляньском морском университете позволило получить модель принятия решений при расхождении двух судов в открытом море [325 — 327].
Польскими исследователями [267] развивается концепция идеи профессора А. И. Родионова трехмерного «домена судна» как геометрической области, дающей возможность идентифицировать опасные ситуации в отношении как столкновения двух судов, так и столкновения своего судна с навигационными опасностями. Размеры «домена» включают статические (размеры и форма корпуса, запас под килем и т. д.) и динамические (ширина полосы движения судна, влияние ветра, течения и т. д.) составляющие.
По определению С. Г. Погосова [194, с.45−48]: «Вокруг судна как на ходу, так и на стоянке всегда должно быть пространство, в пределах которого оно, приняв необходимые меры, может избежать непосредственного контакта с другими объектами, силовое взаимодействие с которыми чревато аварийными последствиями. Принцип рассмотрения положения на стесненной акватории не судна, а его ЗНБ, равно как взаимодействие зон навигационной безопасности, а не судов, облегчает и даже в ряде случаев дает возможность решать, причем оперативно, задачи, связанные с оценкой размеров портовых вод, а также плаванием в них. На стесненной акватории судном следует управлять так, чтобы в пределах его ЗНБ не было бы других объектов, представляющих 'навигационную опасность. Когда речь идет о других объектах, то, если это суда, имеются в виду не они сами, а их ЗНБ» .
Из определения В. П. Таратынова [227, с.35−36] следует более обобщенное понятие ЗНБ: «С позиций системного анализа ЗНБ можно определить как систему, имеющую свою особую структуру, объединяющую внутренние и внешние факторы. Их взаимодействие позволит выбрать оптимальные сочетания, определяющие наиболее эффективное использование судна как транспортного средства. Оба параметра структуры взаиморегулируются, определяя тем самым размеры и формы зон опасного сближения. К внутренним факторам относятся размеры судна, его маневренные качества, скорость, точность используемых методов и средств судовождения, а также практический опыт экипажа. К внеш.
— - 9 — ¦ ним факторам можно отнести видимость, силу и направление ветра, течения, волнения, характеристики судоходного пространства (глубина, ширина, навигационное обеспечение и т. д.). Из перечисленных факторов управляемыми являются скорость и курс судна. Косвенно управляемыми являются устойчивость судна на курсе и поворотливость. Внешние гидрометеорологические факторы неуправляемы и переменны во времени. Однако на короткий промежуток времени их можно считать постоянными.. При следовании узкостями и каналами границы зоны опасного сближения часто совпадают с опасными изобатами и т. д." .
Целью настоящей работы является обобщение этих исследований и создание теоретических основ математических моделей процессов движения судна, формирования свободного водного пространства вокруг него в виде конфигурации сплошной деформируемой среды ЗНБ, которые позволили бы разрабатывать методологию синтеза адаптивных алгоритмов управления движением конфигурации судно-ЗНБ как единого деформируемого целого. Такая модель позволяет объединить геометрические понятия свободного пространства вокруг судна и динамическое поведение ЗНБ при контакте с ограждающими линиями или опасностями и адаптироваться к преобладающим условиям плавания с учетом опыта и индивидуальных наклонностей судоводителей осуществляющих общее управление процессами судовождения.
В рамках э. того научного направления автором разрабатывается методология решения ряда теоретических и прикладных задач построения алгоритмов управления по принципу иерархической декомпозиции процессов от линейной и угловой скоростей движения судна — на нижнем уровне, до координат его положения и деформации ЗНБ — на верхнем уровне.
Методы исследований. В основу теоретических исследований диссертационной работы положены результаты и достижения автоматизации процессов судовождения с использованием аппарата уравнений состояния, векторного и тензорного исчисления, теории линейных и нелинейных дифференциальных уравнений, теории систем управления, механики пространственного движения твердого тела, теории сплошных сред, методов решения обратных задач динамики систем, методов синтеза адаптивных систем управления, методов моделирования на ЭВМ. Научная новизна работы заключается в следующем: 1. Разработаны общие методологические направления автоматизации процессов навигации и управления судном с применением ЗНБ, включающие стратегический тактический уровни управления и обеспечивающие комбинированное управление, состоящее из программного, обратной связи и адаптации;
2. Обобщены формулы взаимного преобразования прямоугольных и произвольных криволинейных координат движения судна и его основных кинематических характеристик;
3. Произведена обобщенная систематизация и классификация применения концепций ЗНБ для обеспечения безопасности мореплавания;
4. Впервые сформулировано понятие конфигурации сплошной деформируемой среды ЗНБ, двигающейся вместе с судном;
5. Впервые' разработана теория кинематики движения конфигурации сплошной деформируемой среды ЗНБ и ее характеристик в виде перемещений, деформаций, скоростей, градиентов и тензоров, которые также могут применяются для представления полей скоростей течения и других навигационных параметров. Сформулированы понятия и уравнения изоповерхностей параметров ЗНБ, определяющих уровни безопасности плавания судна;
6. Впервые разработана теория динамической модели движения судна и конфигурации сплошной деформируемой среды ЗНБ с учетом действия всех сил на основе единой методологии уравнений Эйлера.
Лагранжа и понятий суммарной кинетической энергии системы суд-но-жидкость-ЗНБ-внешняя среда;
7. Впервые предложена методология определения функциональных реакций контакта конфигурации ЗНБ с ограждающими линиями на основе теории упругости, позволяющая рассматривать движение конфигурации судно-ЗНБ, как движение судна в потенциальном силовом поле функциональных деформаций конфигурации ЗНБ и определять работу органов управления необходимую для обеспечения заданного уровня безопасности плавания через изопотенциальные поверхности ЗНБ;
8. Разработана методика иерархической декомпозиции процессов управления движением судна и конфигурацией ЗНБ, при которой на верхнем уровне управления положением судна и конфигурацией ЗНБ формируются псевдоуправления в виде изменений линейных и угловой скоростей судна, а на нижнем уровне — непосредственно управляющие воздействия на руль и движители для псевдоуправлений;
9. Разработаны прикладные методы обратных задач динамики для построения алгоритмов управления по уровням иерархии от скоростей движения до координат положения судна и конфигурации ЗНБ;
10. Разработаны прикладные методы аналитического конструирования оптимальных регуляторов (АКОР) по критерию обобщенной работы (КОР) для построения адаптивных алгоритмов управления судном и конфигурацией ЗНБ с прогнозирующей моделью, текущей идентификацией параметров и оценкой состояния. Практическая ценность работы заключается в том, что на основе разработанных теоретических положений открываются перспективы формулировки комплекса задач по обеспечению безопасности плавания, адаптации движения судна к изменению обстановки и ее классификации уровнями конфигурации ЗНБ, совершенствования понятий «хорошей морской практики» для использования в последующем в системе управления. Прикладные результаты исследования могут быть использованы при разработке конкретных адаптивных судовых систем управления или береговых систем управления движением судов (СУДС), а также систем управления другими видами транспорта.
Реализация результатов работы. Результаты диссертационной работы является основной частью комплексной госбюджетной НИР кафедры Судовождения НГМД «Теоретические и методологические основы решения задач судовождения с помощью современных ТСС» (ЖТ01.9.30 4 058), выполненной в соответствии с отраслевой программой П05 «Перспективных работ по. повышению безопасности мореплавания и совершенствования ТСС и связи на 1991 — 1995 гг» .
Основные результаты диссертационной работы переданы в департамент мореплавания «РОСМОРФЛОТа» в виде научно-технического продукции по хоздоговорной НИР № 51−28−41−94/1 «Разработка математического и алгоритмического обеспечения процессов навигации и управления движением системы судно — зона навигационной безопасности (ЗНБ)» (ЖТ 01.9.50 1 812), выполненной в 1994 — 1995 гг под руководством автора по заказу «РОСМОРФЛОТа» .
Отдельные результаты диссертационной работы использованы при разработке «Положения о системе движения судов Морской администрации порта Новороссийск (СДС МАПН)» и «Руководств оператору СДС.» по хоздоговорной НИР «Организационно — техническое обеспечение и рекомендации по внедрению Международного Кодекса по управлению безопасной эксплуатацией судов и предотвращением загрязнения (МКУБ)» (№ГР 01.9.60 2 293) и хоздоговорной НИР «Анализ и разработка системы контроля и стоянки судов на акватории порта Новороссийск, в зоне действия СУДС и прилежащих водах» (ЖТ 01.9.70 5 092), выполненных в 1995 — 1997 гг под руководством автора по заказу МАПН.
Отдельные положения диссертационной работы внедрены в учебный процесс подготовки инженеров-судоводителей НГМА при дипломном проектировании, по курсам «Автоматизация судовождения», «Навигация и лоция», «Управление судном» .
Апробация работы. Основные положения и результаты работы докладывались и обсуждались на:
1. На ежегодных научно-технических конференциях профессорско-преподавательского состава НГМА в 1985 — 1997 гг (г.Новороссийск);
2. На научно-технических конференциях профессорско-преподавательского состава ГМА имени адмирала С. О. Макарова в 1991 — 1994 гг (г.С.-Петербург) ;
3. Научной конференции РАН Отдел проблем машиностроения механики и процессов управления: Проблемы экологии, энергетики, безопасности на транспорте, результаты исследований, практика их применения (г.С.-Петербург) 1992 г.;
4. XVI Международной научно-технической конференции. Секция радиосвязи и радионавигации С.-ПБНТОВТ (г. С.-Петербург) 1992 г.;
5. 3rd International Conference МСМС'94 7−8 semtember 1994, Southampton, UK (стендовый доклад).
Публикации. Содержание диссертации опубликовано в 45 работах, в том числе, 1 учебном пособии, 3 монографиях, 33 статьях, 8 отчетах по НИР.
Структура и объем работы. Диссертация написана на 290 страницах и состоит из содержания на 3 страницах, введения на 9 страницах, семи глав-на 236 страницах, включая 36 иллюстраций и 12 таблиц, заключения на 3 страницах, списка литературы из 327 наименований на 30 страницах, двух приложений на 6 страницах.
Основные результаты исследований, полученные в диссертационной работе, можно сформулировать следующими обобщенными выводами:
1. Разработанные методологические направления и этапы решения задач автоматизации процессов навигации и управления судном с применением деформируемой конфигурации ЗНБ объединяют все проблемы в единую — обеспечение безопасности мореплавания и позволяют рассматривать все задачи управления как организацию движения конфигурации судно-ЗНБ, т. е. поддержание, изменение, или приведение ЗНБ к заданной конфигурации. Это открывает качественно новые подходы к формализации задач судовождения, экспериментальной проверке движения, понимания и задания механического поведения конфигурации судно-ЗНБ, построению систем управления судном и другими подвижными объектами.
2. Получены и систематизированы формулы взаимного преобразования судовых, маршрутных, неподвижных земных прямоугольных и произвольных криволинейных координат движения судна и его основных кинематических характеристик (скоростей, ускорений), позволяющие решать задачи кинематики желаемого движения конфигурации судно-ЗНБ.
3. Обобщенная систематизация и классификация концепций применения ЗНБ позволяют выделить частные и общие подходы решения задач обеспечения безопасности мореплавания в различных условиях. Наиболее универсальными и предпочтительными являются круговые и эллиптические ЗНБ и в виде сплошной деформируемой среды, двигающейся вместе с судном. Обладая условием непрерывности контура ЗНБ, они упрощают математическое решение задач при автоматизации процессов навигации и управления.
— 251.
5. Разработанная теория кинематической модели движения конфигурации ЗНБ как сплошной деформируемой среды в виде перемещений, скоростей, градиентов и тензоров позволяет предсказывать и осуществлять с помощью рулей и движителей необходимые механические эффекты движения, реализующие, в том числе, понятия «хорошей морской практики». Кинематические характеристики конфигурации ЗНБ обобщенные уравнениями тензорных изоповерхностей представляют уровни безопасности (маневр последнего момента, опасное сближение, и т. д.), которые обладают важными свойствами для решения задач классификации и слежения за навигационной обстановкой. Эллипсоиды уровней деформации можно объединять с эллипсами (эллипсоидами) погрешностей места судна или в самом общем случае с эллипсоидами множеств достижимости системы управления конфигурацией судно-ЗНБ. Эти характеристики позволяют также представить поле скоростей течений (и других навигационных параметров) в окрестности судна и конфигурации ЗНБ в судовых координатах.
6. Разработанная теория динамической модели движения судна и конфигурации сплошной деформируемой среды ЗНБ с применением уравнений Эйлера — Лагранжа и понятий суммарной кинетической энергии системы судно-жидкость-ЗНБ-внешняя среда позволяет на основе единой методологии учитывать действие всех сил и внешних воздействий, в том числе, вводимых искусственно функциональных связей реакций судна — ЗНБ — ограждающая линия для решения задач безопасности плавания. Искусственные массы в уравнениях движения судна и конфигурации ЗНБ позволяют вырабатывать управляющие воздействия на судно с запасом на инерционность и могут использоваться настроечными параметрами для адаптации базовой математической модели судна при переменных режимах движения и условиях плавания.
7. Созданная методология представления функциональных реакций.
— 252 контакта конфигурации ЗНБ с ограждающими линиями на основе теории упругости позволяет рассматривать движение конфигурации судно-ЗНБ, как движение судна в потенциальном силовом поле функциональных деформаций конфигурации ЗНБ и определять работу органов управления необходимую на обеспечение движения судна с заданным уровнем безопасности через изопотенциальные поверхности ЗНБ. Раскрывается физический смысл модулей упругости конфигурации ЗНБ с позиций силовых управляющих воздействий на судно, позволяющих адаптировать конфигурацию ЗНБ и оптимизировать режимы маневрирования судна.
8. Декомпозиция процессов управления движением судна и конфигурацией ЗНБ на основе комбинирования естественных (быстрые, медленные), автономных и иерархических методов позволяет упростить решение поставленных задач управления и синтеза систем управления. При этом на верхнем уровне управления положением судна и конфигурацией ЗНБ формируются псевдоуправления в виде изменений линейных и угловой скоростей судна, а на нижнем уровне непосредственно вырабатываются управляющие воздействия на руль и движители для отслеживания псевдоуправлений — скоростей, задаваемых верхним уровнем управления.
9. Разработанные прикладные методы синтеза алгоритмов управления на основе обратных задач динамики дают возможность их построения по самым общим уравнениям управляемого процесса, используя информации только желаемого программного движения. Моделирование управляемого процесса осуществляется непосредственно самой системой в ее естественном движении, обеспечивая адаптацию алгоритма. Синтез алгоритмов управления осуществляется по уровням иерархии от скоростей движения до координат положения судна и конфигурации ЗНБ. Это позволяет строить системы управления различными параметрами и различного типа, в том числе, системы дистанционного управ.
— 253 ления с использованием всевозможных средств связи, например, СУДС.
10. Исследование методов АКОР по КОР показывает, что наилучшим их вариантом для построения адаптивных алгоритмов управления судном и конфигурацией ЗНБ является использование прогнозирующей модели, работающей в ускоренном прямом и обратном времени на интервале оптимизации, текущей идентификацией ее параметров и оценкой состояния. Такое сочетание взаимодействия подсистем при функционировании системы управления позволяет формировать оптимальное управление судном и конфигурацией ЗНБ на каждый такт управления и адаптировать его к текущей навигационной обстановке.
И. Моделирование исследуемых процессов показывает, что теоретические предпосылки методов управления движением судна и конфигурацией ЗНБ правомочны и полученное математическое обеспечение процессов управления практически реализуемо, как в судовых навигационных комплексах, так и в береговых СУДС.
ЗАКЛЮЧЕНИЕ
.
Список литературы
- Абрамов С.И. и др. Алгоритмизация и программное обеспечение задачи исследования функциональных алгоритмов системы динамической стабилизации судна// Вопр. судостроения/ Судовая автоматика, 1985. ВЫП. 32. — С.30 — 36.
- Алова Т.В., Беляев Н. В., Лещинский В. А. Динамические модели поисково-разведывательных комплексов/ Изв. С-П. электротехн. ун-та, 1993, — Вып. 460.- С. 18 22.
- Ананьев Д.М. Устойчивость судна на курсе при совместном действии ветра и волнения// Пробл. динамики корабля/ Материалы НТО СП им. акад. А. Н. Крылова, 1976, — Вып. 242, — С. 14 36.
- Анфимов В.Н., Ваганов Г. И., Павленко В. Г. Судовые тяговые расчеты.- М.: Транспорт, 1978.- 216 с.
- Артюшин Л.М. Задачи управления конфигурацией механической системы/ Прикл. мех. (Киев), 1987, — Т. 33, — № 2, — с. 89 95.
- Артюшков Л.С., Ачкинадзе В. Ш., Русецкий A.A. Судовые движители,— Л.: Судостроение, 1988, — 296 с.
- Афанасьев Б.В., Афанасьев В. В. Формирование зоны навигационной безопасности// Методы и техн. ср-ва мор. навигации/ Сб. тр. ГМА им. адм. С. 0.Макарова.- М.: Мортехинформреклама, 1993.- С.6−12.
- Басин A.M. Теория устойчивости на курсе и поворотливости судна. М.: ГИТТЛ, 1949.- 226 с.
- Басин A.M., Веледницкий И. О., Ляховицкий А. Г. Гидродинамика судов на мелководье,— Л.: Судостроение, 1976, — 306 с.
- Баскин A.C., Москвин Г. И. Береговые системы управления движением судов, М.: Транспорт, 1986, — 159 с.
- Баскин A.C., Масленников В. А. Оценка ситуации и выбор маневра- 255 для расхождения по данным РЛС// Мор.трансп.: Сер. Безопасность мореплавания/ Э-И. ЦБНТИ ММФ.- 1980.- Вып.5 (125).- С. 11 22.
- Барковский В.В., Захаров В. Н., Шаталов A.C. Методы синтеза систем управления: Матрично структурные преобразования и алгоритмы управляющих ЦВМ.- М.: Машиностроение, 1981.- 277 с.
- Батенко А.П. Системы терминального управления,— М.: Радио и связь, 1984.- 160 с.
- Бахилина И.М., Гольмшток В. Я. Особенности динамики бурового судна как объекта цифрового управления// Системы электроэнергетики и упр. судов/ Изв. ЛЭТИ, 1983, — Вып.334.- С. 55 59.
- Безпровозная A.A., Кравец Ф. Б., Филлипов A.A. Исследование динамики «челночного» аппарата// Гидродинамика техн. средств осв. океана/ Тр. ЛКИ, 1981, — С. 36 42.
- Бек В.В., Вишняков Ю. С., Махлин А. Р. Интегрированные системы активного управления. Методы алгоритмической интеграции, — М.: Наука, 1986, — 180 с.
- Бек В.В., Вишняков Ю. С., Махлин А. Р. Интегрированные системы терминального управления. Методы алгоритмической интеграции.-М.: Наука, 1989.- 224 с.
- Белов Ю.И. Доплеровский гидроакустический лаг автоматизированных систем управления// Автоматиз. судовых произв. процессов/ Тр. ЦНИИМФ, 1984, — Вып. 288, — С. 25 29.
- Белоцерковский С.М., Кочетов Ю. А., Красовский A.A., и др. Введение в аэроавтоупругость.- М.: Наука, 1980, — 383 с.
- Бернштейн С.И. и др. Структура системы управления движением судна при прохождении ограниченных фарватеров/ Задачи автоматиз. упр. движением судов в районах интенсивного судоходства, 1983, — с. 40 45. ¦
- Богданов А.И., Булатов В. И., Щукин В. Б. Программное обеспече- 256 ние следящей системы органов активного управления движением добыточного судна// Изв. ЛЭТИ, 1991, — № 435.- С. 67 71.
- Бондарос Ю.Г. Двухканальные системы,— М.: Машиностроение, 1985, — 152 с.
- Борисенко И.И., Казаков И. Е. Синтез стратегий управления и обработки информации на основе декомпозиции и редуцирования многомерных динамических систем (обзор)// Изв. АН РАН/ Техн. ки-берн., 1991.- № 3.- С. 198 225.
- Бородин Е.Л., Васьков A.C., Довгаль И. В. Анализ математических моделей движения судна для автоматизации управления (по иностранным исследованиям).- Новороссийск: НВИМУ, 1986. 21 с,-Рус, — Деп. в В/О «Мортехинформреклама», 25.11.86, N 665 — мф.
- Боул А.Г., Джоунз К. Д. Пособие по использованию средств автоматической радиолокационной прокладки,— Л.: Судостроение, 1986.- 128 с.
- Буков В.Н. Адаптивные прогнозирующие системы управления полетом, — М.: Наука, 1987, — 232 с.
- Ванирюхин Г. И., Иванов В. М. Синтез систем управления движением нестационарных объектов,— М.: Машиностроение, 1988, — 168 с.
- Васильев A.B. Управляемость судов.- Л.: Судостроение, 1989.-327 с.
- Васьков A.C. Вариационный анализ движения управляемой системы судно зона навигационной безопасности'/ Сб. науч. тр. НГМА -КГУ. — Краснодар, 1994, — С. 61 — 63.- 257
- ВаськовА.С. Декомпозиция (разделение) процессов управления движением судна и конфигурацией ЗНБ/ Российскому флоту 300 лет: Материалы НТК НГМА. Новороссийск: НГМА, 1996, — С. 9 — И.
- Васьков A.C. Динамическая модель движения конфигурации зоны навигационной безопасности (ЗНБ)-судно/ Сб. науч. тр. НГМА -КГУ, — Краснодар, 1994, — С. 114 117.
- Васьков A.C., Песков Ю. А. Концепции зон навигационной безопасности (ЗНБ) в судовождении/ Сб. науч. тр. НГМА, — Новороссийск, 1997, — Вып.2, — С. 41 56.
- Васьков A.C. Исследование линейной модели движения и адаптивного управления судном по программной траектории: Автореф. дисс. на соиск. уч. ст. к. т.н. Л.: ЛВИМУ, 1982.- 24 с.
- Васьков A.C. Математическая модель движения конфигурации зоны навигационной безопасности судно, — Новороссийск: НГМА, 1994.-54 е. Рус, — Деп. — в Мортехинформреклама М282-мф94.
- Васьков A.C. Математическое обеспечение процессов движения системы судно зона навигационной безопасности,— М.: Мортехинформреклама, 1994, — 89 с.
- Васьков A.C. Определение реакций контакта зоны навигационной безопасности как сплошной среды с ограждающими линиями.- Новороссийск: НГМА, 1996, — 18 е.- Рус, — Деп. в Мортехинформреклама 1.3.96, М296-мф96.
- Васьков A.C. Распределение скоростей движения конфигурации зоны навигационной безопасности, — Новороссийск: НГМА, 1993. 17- 258 е.- Рус, — Деп. в Мортехинформреклама.
- Васьков A.C. Характеристики движения и деформации зоны навигационной безопасности.- Новороссийск: НГМА, 1993.- 35 с. -Рус.-Деп. в В/О «Мортехинформреклама» 04.09.93, № 1262-мф.
- Васьков А. С. Управление движением конфигурации судно-ЗНБ по заданной траектории методами обратных задач динамики, — Новороссийск: НГМА, 1996, — 28 е.- Рус, — Дел. в Мортехинформреклама 15.3.96, № 1297-мф96.
- Васьков A.C. Управление движением судна и конфигурацией зоны навигационной безопасности.- Новороссийск: НГМА, 1996, — 103 с.
- Васьков A.C., Васьков A.A. Принципы оптимального иерархического адаптивного управления движением судна и конфигурацией ЗНБ/ Российскому флоту 300 лет: Материалы НТК НГМА.- Новороссийск: НГМА, 1996, С. 8 — 9.
- Васьков A.C., Мамаев К. П. Математическая модель навигацион-но-гидрографических условий плавания судна в узкостях.- Новороссийск: НГМА, 1989.- 23 е.- Рус, — Дел. в Мортехинформреклама 10.08.89, М024-Мф89.
- Васьков A.C., Мамаев К. П. Кинематическая модель движения зоны навигационной безопасности относительно ограждающей линии// Материалы XVI НТК: Секция радиосвязи и радионавигации РАН.-М.: РАН, 1993, — Том 2, — С. 100 103.
- Васьков A.C., Мамаев К. П., Скороходов С. В. Сравнение методов определения ширины полосы движения судна.- Новороссийск: НВИМУ, — 259 1987, — 41 е.- Рус, — Деп. в Мортехинформреклама, № 725 мф.
- Васьков A.C., Мамаев К. П., Скороходов C.B. Сравнительный анализ методов определения скоростного запаса глубины при движении судна на мелководье, — Новороссийск: НВИМУ, 1989, — 61 с.-Рус, — Деп. в В/О"Мортехинформреклама", № 959 мф.
- Васьков A.C., Меньшенин О. И. Адаптивное управление движением судна по траектории //Навигация и управление судном/Тр ЦНИИМФ. Л.: Транспорт, 1984, — С. 18 — 25.
- Васьков A.C., Меньшенин О. И., Студеникин А. И. Обобщенная адаптивная модель движения судна// Методы и техн. средства мор. навигации/ Сб. науч. тр. ЛВИМУ, 1986, — С. 47 52.
- Васьков A.C., Мироненко A.A. Анализ и выбор методов автоматизированного поиска оптимального маршрута в навигационных комплексах/ Сб. научн. тр. НГМА, 1997, — Вып. 2, — С. 103 118.
- Васюков В.И., Горбатенко С. А. Метод обратных задач динамики в теории управления летательных аппаратов.- М.:МАИ, 1988, — 56 с.
- Введение в механику сплошных сред /Черных К.Ф., Алешков Ю. 3., Понятовский В. В., Шамина В. А. Л.: Из-во ЛГУ, 1984.-280 с.
- Витавер Л.М., Павленко В. Г. Общее уравнение движения судна на течении/'/ Совершенствование ходовых .и маневренных качеств судов/ Тр. НИИВТ, 1984, — С. 25 39.
- Войткунский Я.И., Фаддев Ю. И., Федяевский К. К. Гидромеханика.-Л.: Судостроение, 1982, — 456 с.
- Воловодов С.К., Розенвассер E.H., Черняев М. Г. Исследование автономных периодических режимов в нелинейных цифровых системах стабилизации морских подвижных объектов// Автоматиз. судовых техн. средств/ Тр. ЛКИ, 1984, — С. 88 94.
- Воробьев Ю.Л., Смирнова Т. В. Гидродинамическая задача о взаимодействии судов, расходящихся параллельными курсами на значи- 260 тельном мелководье/ Материалы по обмену опытом НТО им. акад. А. Н. Крылова, 1986, — Вып. 433.- С. 4 13.
- Воробьев Ю.Л., Смирнова Т. В. Об оценке гидродинамического взаимодействия судов, расходящихся на мелководье/ Теор. и практ. вопр. судостр. и судоремонта, 1986.- С. 33 38.
- Востриков A.C. Синтез нелинейных систем методом локализации.-Новосибирск: НГУ, 1990.
- Востриков A.C., Юркевич В. Д. Синтез многоканальных систем с вектором скорости в законе управления/ Автоматика и телемеханика, 1993, — N2, — С. 51 64.
- Вьюгов В.В., Павленко В. Г. Экспериментальное исследование гидродинамических характеристик речных судов в мелководном канале// Эксперимент, гидромех. судна/ Материалы НТО СП им. акад. А. Н. Крылова, 1980, — Вып. 322, — С. 50 53.
- Галиуллин A.C. Методы решения обратных задач динамики.- М.: Наука, 1986, — 224 с.
- Гантмахер Ф.Р. Теория матриц,— М.: Наука, 1988, — 552 с.
- Горбачева Л.М., Трунин В. К. Расчетная оценка дрейфа судна в условиях волнения моря// Вопросы гидродин. прочн. и проектир. судов реч. флота/ Сб. науч. тр. ЛИВТ, 1989, — С. 55 63.
- Гордеев О.И. Уравнения движения судна по заданной трассе /Тр. НИИВТ, 1974, — Вып. 96.
- Гордеев 0. И., Павленко В. Г. Общее уравнение движения судна в реальных путевых условиях/ Тр. НИИВТ, 1969, — Вып.34, — С.22−32.
- Гордеев О.И. К определению кинетической энергии возмущений жидкости, вызванных движением судна в неравномерном потоке// Вопросы совершенст. методов и средств судовождения на внутр. вод. путях/ Тр. ГИИВТ, 1983, — Вып. 197, — С. 30 38.
- Гордеев О.И. Практические расчеты маневров толкаемых составов- 261 на затруднительных для судоходства участках рек// Вопросы совершенен методов и средств судовождения на внутр. вод. путях/ Тр. ГИИВТ, 1983, — Вып. 197, — С. 39 57.
- Гордеев О.И. Идентификация математической модели движения судна по диаграмме поворотливости, полученной из эксперимента// Эксплуат. реч. флота Сибири в нов. условиях/ НГАВТ, — Новосибирск, 1994.- С. 89 91.
- Гофман А.Д. Теория и расчет поворотливости судов внутреннего плавания,— Л.: Судостроение, 1978, — 258 с.
- Гофман А.Д. Движительно-рулевой комплекс и маневрирование судна: Справочник.- Л.: Судостроение, 1988, — 360 с.
- Гофман А.Д. К вопросу о движении судна на криволинейном течении// Вопросы гидродинамики, прочности и проектирования судов реч. флота/ Сб. тр. ЛИВТ. Л.: ЛИВТ, 1989, — С. 64 — 72.
- Гофман А.Д., Лопырев И. Н. Уравнения движения судна на трассе со случайными параметрами/ Тр. ЛИВТ,' 1972, — Вып. 133.- 4.1.
- Гришин С.А. Методы Ляпунова в обратных задачах динамики// Изв. АН СССР/ Техн. кибернетика, 1985, — М. С. 202 — 207.
- Грищенко А.3., Хиленко В. В. Метод понижения порядка и исследование динамических систем, — Киев: УМК ВО, 1988, — 162 с.
- Гуськов Ю.П. Дискретно непрерывное управление программным выведением самолетов. — М.: Машиностроение, 1987, — 128 с.
- Дектярев М.Ю., Степанов С. А., Турусов С. Н. Система координированного управления комплексом технических средств корабля/ Изв. С, Петербург, ун-та, — 1993, — № 465, — С. 30 — 34.
- Демин С.И. Разработка математической модели процесса торможения судов/ Совершенст. ходовых и морех. качеств судов, 1980.-Вып. 332, — С. 87 95.
- Дмитриев В.И. Показатели безопасности судовождения// Техн. средства судовождения и связи на внутр. судоход, и мор. путях/ С-Пб. гос. ун-т вод. коммуникаций, 1.994, — С. 93 99.
- Дмитриев С.П. Высокоточная морская навигация,— Л.: Судостроение, 1991.
- Есимура Я., Нагасима Д. Прогнозирование управляемости судна при ветре/Нихон дзосэн гаккай ромбунсю, 1985, — Т.158, — № 12. -С.125 136.(Перевод ВЦП-N М-24 561).
- Жевнин A.A., Колесников К. С., Крищенко А. П., Толокнов В. И. Синтез алгоритмов терминального управления на основе концепций обратных задач динамики (обзор)// Изв. АН СССР/ Техн. киберн., 1985. М. — С. 180 — 198.
- Жермен П. Курс механики сплошных сред. М.: ВШ, 1983.- 399 с.
- Жухлин A.M., Сапегин В. Б. Анализ моделей управляемости в современных и перспективных САРП// Пробл. совер. комп. метод, прогноз, морех. кач. судов/ Тез. докл. ВНТК (33 Крыловские чтения).- Л.: 1987.- С. 54 55.
- Зайков В.И. Расчет произвольного маневра судна на ЭЦВМ/ Материалы по обмену опытом НТО им. акад. А. Н. Крылова, 1978.-Вып. 284, — С. 32 39.
- Зайков В.И. Прогнозирование траектории движения судна в условиях ветра и течения// Повышение техн. уровня и качества судов реч. флота/ Тр. ЛИВТ, 1982, — Вып. 175, — С. 60 68.
- Зайков В.И. Математическая модель управляемого движения судна/ Повыш. техн.- экон. показателей судов реч. флота.- Л.: 1985, — С. 73 83.
- Зайков В.И. Прогнозирование движения судов в системах управления и обеспечения безопасности судоходства: Автореф. дисс. на соиск. уч. ст. д. т.н. Л.: ЛВИМУ, 1990, — 48 с.
- Запорожцев A.B. Численный метод решения жестких систем диффе- 263 ренциальных уравнений динамики судов/ Вычис. гидродин, — Горький: 1989.- С. 98 102.
- Земляновский Д.К. Теоретические основы безопасности плавания судов, М.: Транспорт, 1973, — 224 с.
- Зильман Г. И. Идентификация гидродинамических коэффициентов уравнений управляемости по совокупности режимов движения// Гидродинамика техн. ср. освоен, океана/ Материалы НТО СП им. акад. А. Н. Крылова, 1985, — Вып. 417, — С. 49 55.
- Зильман Г. И. Использование результатов натурного эксперимента для математического моделирования движения судна в имитационных системах// Морех. качеств, судов и ср. освоения океана/ Тр. ЛКИ, 1986, — С. 70 76.
- Зильман Г. И., Горбачева Л. М. Потеря управляемости судна на регулярном волнении// Средства и метод, повышен, морех. качеств судов/ Тр. ЛКИ, 1989.- С. 59 63.
- Зильман Г. И., Красницкий А. Д. Управляемость судна,— Л.: ЛКИ, 1986, — 88 с.
- Зильман Г. И., Тер-Захарьянц А.А. Идентификация уравнения движения судна как задача многокритериальной оптимизации/ Материалы по обмену опытом НТО им. акад. А. Н. Крылова, 1986, — Вып. 433.- С. 34 47.
- Зотеев А.И. Управление приземлением летательного аппарата в скользящем режиме// Изв. ВУЗов/ Авиационная техника, 1990.-М.- С. 28 33.
- Зубов В.И. Динамика управляемых систем.-М.: ВШ, 1982.- 285 с.
- Иванов И.В. Взаимодействие двух судов при их маневрировании: Автореф. дисс. к.т.н.-Л.: ЛКИ, 1981.
- Иванов Н.М., Лысенко Л. Н., Мартынов А. И. Методы теории систем в задачах управления космическим аппаратом. М.: Машиностроение, 1981.- 254 с.
- Ильюшин A.A. Механика сплошной среды, М.: МГУ, 1990.- 310 с.
- Исии е., Симояма И., Илоуэ X. и др. Мехатроника.- М.: Мир, 1988.- 314 с.
- Калинская И.А. Алгоритм параметрической настройки систем управления движением судна// Методы и алгоритмы решения задач контроля и упр. на трансп./ Сб. тр. С-П. гос. ун-та вод. коммуникаций, 1993, — С. 87 91.
- Калинская И.А. Идентификация параметров модели управляемости судна// Методы и алгоритмы решения задач контроля и упр. на трансп./ Сб. тр. С-П. гос. ун-та вод. коммуникаций, 1993.-С. 98 108.
- Калман P.E., Фалб П. Л., Арбиб М. Очерки по математической теории систем. М.: Мир, 1971, — 400 с.
- Капитонов И.В. Определение на ЭЦВМ ходовых характеристик судов. М.: Транспорт, 1982, — 199 с.
- Карамайкин А.С. Управление упругим динамическим объектом// Точность и надежность/ М. сб. научн. тр. ЛИАП, 1984.-Вып.169.- С. 36 39.
- Карамайкин A.C. Синтез закона управления упругим объектом// Проект, программных комплексов и систем/ М. сб. научн. трудов ЛИАП, 1989, — С. 75" — 82.
- Касьянов В.А., Ударцев Е. П. Определение характеристик воздушных судов методами идентификации.- М.: Машиностроение, 1988.-176 с.
- КацманФ.М. Эксплуатация пропульсивного комплекса морского судна, М.: Транспорт, 1987, — 223 с.
- Кейхилл P.A. Столкновения судов и их причины.- М.: Транспорт, 1987, — 240 с.- 265
- Китовски 3. Проектирование системы управления судном по заданной траектории/ Комплекс, автоматиз. Вопр. упр.- 1992.-№ 3−4.- С. 24 27.
- Колесников A.A. Последовательная оптимизация нелинейных агрегированных систем управления,— М.: Энергоатомиздат, 1987.-160 с.
- ИЗ. Коноплев В. А. Матричные формы уравнений динамики судна// Ди-намич. нагрузки и прочн. суд. констр./ Тр. ЛКИ, 1984.-С.66−69.
- Коренев Г. В. Цель и приспособляемость движения,— М.: Наука, 1974, — 528 с.
- Король Ю. М, Тимошенко В. Ф. Маневрирование автономного подводного аппарата в вертикальной плоскости// Гидродин. корабля/ Сб. науч. тр. НКИ, 1989, — С. 19″ 23.
- Корн Г., Корн Т. Справочник по математике для научных работников и инженеров, М.: Наука, 1984, — 831 с.
- Короткин А.И. Присоединенные массы судна: Справочник.- Л.: Судостроение, 1986.- 312 с.
- Косэ К., Кобаяси X. Имитатор маневрирования при расхождении судов и его применение/ Нихон кокай гаккай ромбунсю, 1973.-№ 50.- С. 75 84.(Перевод ВЦП — Ц57 301).
- Косэ К., и др. Практическое построение моделей управляемого движения судна с малой скоростью/ Bull. Soc. Nav. Archit. Jap., 1989.- № 721.- С. 9 17.
- Красовский A.A. Декомпозиция и синтез субоптимальных адаптивных систем// Изв. АН СССР/ Техн. киберн., 1984, — № 2, — С. 157 -165.
- Красовский A.A. Дуальная задача управления и идентификации в классе кусочно-линейных моделей// Изв'. АН СССР. Техн. киберн., 1990, — № 1, — С. 74 84.- 266
- Красовский A.A. Основы алгоритмического обеспечения автоматического управления полетом// Вопр. киберн./ Пробл. комплекс, киберн. динам, систем, М.: 1992, — № 167, — С. 62 — 76.
- Красовский А.А. Основы алгоритмического обеспечения систем автоматического управления полетом с глубокой интеграцией// Вопр. киберн./ Пробл. комплекс, киберн. динам, систем.- М.: 1992.- № 168.
- Красовский A.A. 'Развитие принципа максимума обобщенной работы/ Автоматика и телемеханика, 1987, — № 1, — С. 13 23.
- Красовский A.A. Неклассические целевые функционалы и проблемы теории оптимального управления (обзор)// Изв. АН РАН/ Техн. киберн., 1992. № 1. — С. 3 — И.
- Красовский H.H. Теория управления движением (линейные системы). М.: Наука, 1968.- 476 с.
- Крауч С., Старфилд А. Методы граничных элементов в механике твердого тела,— М.: Мир, 1987, — 328 с.
- Крутько П.Д. Новые структуры адаптивных алгоритмов управления автоматических систем// Изв. АН СССР/ Техн. киберн., 1990.-т. С. 3 — 17.
- Крутько П.Д. Обращение прямого метода Ляпунова в задачах управления динамическими системами// Изв. АН СССР/ Техн. киберн., 1989.- № 3.- С. 78 89.
- Крутько П.Д. Обратные задачи динамики управляемых систем: Линейные модели. М.: Наука, 1987, — 304 с.
- Крутько П.Д. Обратные задачи динамики управляемых систем: Нелинейные модели. -J.: Наука, 1988.- 328 с.
- Крутько П.Д. Синтез дискретных управлений по функциям Ляпунова// Изв. АН СССР/ Техн. киберн., 1984'.- № 1.
- Крутько П.Д. Функции Ляпунова в обратных задачах динамики уп- 267 равляемых систем. Одномерные системы// Изв. АН СССР/ Техн. киберн., 1983.- N4.- С. 168 177.
- Кудряшов В.Е., Карпович И. А., Нечаев В. А. Системный подход к автоматизации управления плавучим геофизическим комплексом// Системы электроэнергетики и управления движением судов/ Изв. ЛЭТИ, 1982, — Вып. 309, — С. 6 12.
- Кудряшов В.Е., Каргаев П. П. Формирование координированных траекторий движения при управлении океанским многообъектным добыточным комплексом// Изв. ЛЭТИ, 1988, — Вып.2.- С. 17 22.
- Кудряшов В. Е., Рождественский Ю. В., Самсель Я. Синтез адаптивной системы управления движением судна по программе// Системы электроэнергетики и управления движением судов/ Изв. ЛЭТИ, 1983, — Вып. 334. С. 20 — 25.
- Кузьминых Л.Ф., Чугунов B.C. О влиянии волнения на движение подводного аппарата в продольной плоскости// Корабельные комплексы/ Изв. ЛЭТИ, 1978, — Вып. 230, — С. 71 75.
- Кушнарев Ю.М. Выбор параметров авторулевого при управлении судном по заданной траектории// Судовожд. на внутр. вод. путях/ Сб. науч. тр. НИИВТ, 1968.- Вып. 90, — С. 47 58.
- Ладиков Ю.П. Стабилизация процессов в сплошных средах.- М.: Наука, 1978, — 432 с.
- Ланьков Н.И. Принципы построения и экспериментальные основы комплексного тренажера и системы обучения судоводителя речного судна// Ходкость и упр. реч. судов/ Сб. науч. тр. НИИВТ, 1987, — С. 23 26.
- Ленарт А. Расчет параметров сближения плавающих объектов для предупреждения столкновений/ Перевод ВЦП-83/37 662.- М.: 1983, — 50 с.
- Лентарев А.А. Основы теории судопотоков.- Владивосток: Интермор, 1995, — 76 с.
- Лесков М.М., Баранов Ю. К., ГаврюкМ.И. Навигация.- М.: Транспорт, 1986, — 360 с.
- Лефтерова М.С. Исследование маневренности судна на мелководье с помощью’планарного механизма: Автореф. дисс. к. т.н. Л.: ЛКИ, 1986, — 18 с.
- Литвиничев И.О. Декомпозиция больших динамических систем с перекрестными связями (обзор)// Изв. АН СССР/ Техн. киберн., 1989, — N3.- С. 20 28.
- Лойцянский Л.Г., Лурье А. И. Курс теоретической механики: Т.1. Статика и кинематика. М.: Наука, 1982. — 352 е.: Т. 2. Динамика. — М.: Наука, 1983. — 640 с.
- Лопырев И.Н. Построение модели управляемости судна для случая больших отклонений/ Сб.ст. молодых научн. раб. ЛИВТ, 1970.-Ч. VII.
- Лукомский Ю.А., Корчанов В. М. Управление морскими подвижными объектами.- СПб: >Элмор, 1996, — 318 с.
- Лукомский Ю.А., Чугунов B.C. Системы управления морскими подвижными объектами,— Л.: Судостроение, 1988, — 272 с.
- Лурье А. И. Аналитическая механика.-М.:Физматгиз, 1961.-824 с.
- Лурье А.И. Нелинейная теория упругости.- М.: Наука, 1980.-512 с.
- Ляпунов A.M. Лекции по теоретической механике.- Киев: Наук, думка, 1982, — 632 с.
- Мальцев A.C., Куликов Г. Г., Тимофеев И. А. Выбор безопасной скорости по условиям плавания// Мор. трансп.: Сер. Судовождение, связь и безопасность мореплавания/ Э-И.- М.: Мортехинформреклама, 1990, — Вып. 12 (241).- С. '1 7.
- Маневровый тренажер для обучения судовождению в прибрежных- 269 водах и узких проливах/ Сосэн дзюнрэн соти, 1974.(Перевод ВЦП Ц83 690/76).
- Маркеев А.П. Теоретическая механика,— М.: Наука, 1990.-416 с.
- Мастушкин Ю.М. Управляемость промысловых судов,— Л.: Легк. пром-ть, 1981, — 232 с.
- Мастушкин Ю.М. Гидродинамическое взаимодействие судов при встречах и обгонах. -Л.: Судостроение, 1987, — 124 с.
- Мастушкин Ю.М., Шестеренко Е. М. Средства активного управления промысловыми судами.- М.: Агропромиздат, 1985.- 128 с.
- Математические основы судовождения/ В. П. Кожухов, А. М. Жухлин, В. Т. Кондрашихин и др.- М.: Транспорт, 1993.- 200 с.
- Международные правила предупреждения столкновения судов в море 1972 г. (N 9018).- Л.: ГУНИО МО, 1982, — 83 с.
- Мейз Дж. Теория и задачи механики сплошных сред. М.: Мир, 1974, — 318 с.
- Меныиенин О.И., Васьков A.C. Основы построения систем автоматического управления движением судна.- М.: Мортехинформрекла-ма, 1985, — 76 с.
- Метлин В. В. Синтез системы управления судном на подводных крыльях в переходном режиме движения// Вопросы судостроения/ Судовая автоматика, 1978, — Вып.19.- С. 40 46.
- Мирохин Б В., Жинкин В. Б., Зильман Г. И. Теория корабля.- Л.: Судостроение, 1989, — 351 с.
- Моисеев А.Г. Метод оптимально-прогнозируемого управления//- 270
- Изв. АН РАН/ Техн. киберн., 1992, — № 6, — С. 128 134.
- Мори М. Разработка и примеры применения системы моделирования управления судном, с устройством визуального отображения/Иси-кавадзима харима гихо, 1975.- Т.15, — № 6, — С. 733−744.
- Мори М., Танака М. Описание имитатора маневрирования судов компании «IHI»/ Сэмпаку, 1975, — Т.48.- № 11.- С. 38 47. (Перевод ВЦП — Ц86 502).
- Митрофанов В.П., Юльшанский П. Л. Линейная модель движения позиционирующей плавучей буровой установки// Техн. освоен, океана/ Тр. ЛКИ, 1982, — С. 92 98.
- Небеснов В.И. Оптимальные режимы работы судовых комплексов.-М.: Транспорт, 1974, — 200 с.
- Небеснов В.И. Динамика судовых комплексов. Л.: Судостроение, 1967, — 279 с.
- Нелинейные системы автоматического управления: Методы синтеза нелинейных систем автоматического управления/ Е. И. Геращенко, В. Л. Ерман, И. П. Ильин и др. М.: Машиностроение, 1970, — 416 с.
- Никольский А. Е., Черкасова М. К. Модели комплексирования физических взаимодействий динамических систем// Вопр. киберн./ Методы теор. систем и информ. технол., 1990, — № 168, — С. 53−72.
- Номото К. Имитаторы маневрирования судов/ Сэмпаку, 1975.-Т. 48.- № 9, — С. 15 23. (Перевод ВЦП — Ц-86 500/77).
- Ньюмен Дж. Морская гидродинамика.- Л.: Судостроение, 1985.-368 с.
- Обрехт Ю.С. Крен судна при его движении с углом дрейфа: Авто-реф. дисс. на соиск. уч. ст. к. т.н. Л.: ЛКИ, 1979, — 21 с.
- Ольшамовский С.Б., Земляновский Д. К., Щепетов И. А. Организация безопасности плавания судов, М.: 'Транспорт, 1979. — 213 с.
- Орлов В.А. Автоматизация промыслового судовождения,— М.: Аг- 271 -ропромиздат, 1989.- 296 с.
- Павленко В. Г. Универсальные характеристики управляемости судов внутреннего плавания// Гидродинамика судна и судовождение /Тр. НИИВТ, 1978, — ВЫП. 115, — С. 3 32.
- Павленко В.Г. Основы механики жидкости,— М.: Транспорт, 1988, — 240 с.
- Павленко В.Г., Витавер Л. М. Об эквивалентности двух подходов к составлению уравнений движения судна на повороте реки// Гидродинам, судна и судовожд./Тр.НИИВТ, 1979.-Вып.147.-С.3−9.
- Павленко В.Г., Витавер Л. М. Приближенная теория движения твердого тела в установившемся потоке однородной несжимаемой жидкости// Совершенств, ходовых и маневр, качеств судов/ Сб. науч. тр. НИИВТ, 1984, — С. 8 -25.
- Павловская Л.М. Особенности управляемости судов при ветре// Гидродинам, техн. ср-в освоения океана/ Тр. ЛКИ, 1991.-С. 86 95.
- Панов А. Ю. Исследование динамики пространственного движения быстроходных судов/Вычисл. гидродин.- Горький: 1989, — С.48−61.
- Панов А.Ю. Инерционные и демпфирующие характеристики в задачах динамики быстроходных судов// Асимптот, методы в теор. систем, Иркутск: 1983, — С. 129 — 144.
- Пантов Е.Н., Махин Н. Н., Шереметов Б. Б. Основы теории движения подводных аппаратов.- Л.: Судостроение, 1973, — 216 с.
- Первозванский А.А., ГайцгориВ.Г. Декомпозиция, агрегирование и приближенная оптимизация.- М.: Наука, 1979.- 344 с.
- Першиц Р.Я. Управляемость и управление судном.- Л.: Судостроение, 1983.- 272 с.
- Першиц Р.Я., Немзер А. И. Об управляемости судна на течении/ Материалы НТО СП им. акад. А. Н. Крылова, 1971, — Вып. 169.- 272
- Песков Ю.А. Практическое пособие по использованию САРП.- М.: Транспорт, 1995, — 224 с.
- Петров A.A. Алгоритмическое обеспечение информационно-управляющих систем адаптивных роботов: Ч.III. Алгоритмы планирования маршрута мобильных роботов //Итоги науки и техники /Сер Техн. кибернетика, М.: ВИНИТИ, 1987, — Т. 21.- С. 92 — 130.
- Петров Б.Н., Портнов-Соколов Ю. П. и др. Бортовые терминальные системы управления: Принципы построения и элементы теории.-М.: Машиностроение, 1983, — 200 с.
- Петров Б.Н., Рутковский В. Ю., Земляков С. Д. Адаптивное коор-динатно параметрическое управление нестационарными объектами. — М.: Наука, 1980.- 224 с.
- Погосов С.Г. Безопасность плавания в портовых водах. М.: Транспорт, 1977. — 136 с.
- Погосов С. Г. Швартовка крупнотоннажных судов, М.: Транспорт, 1975, — 172 С.
- Погосов С. Г, и др. Обеспечение безопасности движения судов в портовых водах// Обзорная информация. Сер.: Судовождение и связь, М.: ЦБНТИ ММФ, 1974.- 42 с.
- Подводные роботы /Под ред. В. С. Ястребова.- Л.: Судостроение, 1977, — 368 с.
- Практическое кораблевождение (для командиров кораблей, штурманов и вахтенных офицеров). Kh.I.-Л.: ГУНИО МО, 1989.-806 с.
- Пропой А.Й., Пухликов A.B. Задачи оптимального управления в сплошных средах// Модели и методы оптим./ Сб. тр. ВНИИСИ, 1990, — Вып. 7, — С. 60 78.
- Пятницкий Е.С. Принцип декомпозиции в управлении механизмами и электромеханическими системами// Синтез систем управления манипуляционными роботами на принципе декомпозиции/ Сб. тр.1. М.: 1987.- С. 4 15.
- Разработка в Японии методов исследования движения морских судов с точки зрения обеспечения безопасности мореплавания/ Денси кохо кэнкюсе хококу, 1979.- № 23.- С. 36 43.
- Разумовский O.A. Синтез дискретной системы автоматического удержания судна на заданной траектории с учетом взаимодействия ветра, течения и погрешностей измерения// Навигация и управление судном/ Тр. ЦНИИМФ, 1986, — С. 18−29.
- Ракитин В.Д. Применение гидроакустических абсолютных лагов при движении судов в узкостях с экспериментальной оценкой точности// Техн. ср-ва судовожд. и связи на внутр. судоход, и морских путях/ Сб. науч. тр. ЛИВТ, 1986.-С. 52 67.
- Ремез В.Ю. Динамика судна при маневрировании на волнении: Ав-тореф. дисс. д. т.н. Л.: ЛКИ, 1989, — 48 с.
- Ремез В.Ю. Динамика криволинейного движения судна на регулярном волнении// 5 Нац. конгр. по теор. и прикл. мех./ 14 На-учн. методол. сем. по гидродин. судна: Соврем, пробл. гидро-и аэродин. судна, — Варна: 1985. Т.1.- С.2/1 — 2/7.
- Ремез В.Ю. Продольная качка судна, движущегося по криволинейной траектории/ Гидродинамика корабля.- Николаев: 1988, — С. 71 75.
- Родионов А.И., Сазонов А. Е. Автоматизация судовождения. М.: Транспорт, 1992, — 192 с.
- Родионов А.И. Алгоритмирование операций управления судном// Судовождение на морском флоте/ Сб. науч. тр. ЛВИМУ им. адм. С. О. Макарова, 1982, — С. 36 40.
- Рубан А.И. Адаптивное управление с идентификацией, — Томск: ТГУ, 1983, — 136 с.
- Сахаров В.В. Расчет оптимальных регуляторов судовых автомата- 274 ческих систем: Теория и приложения.- Л.: Судостроение, 1983.168 с.
- Седов Л.И. Механика сплошной среды: Т. 1. М.: Наука, 1973.536 с.
- Системы адаптивного управления летательными аппаратами/ А. С. Новоселов, В. Е. Болнокин, П. И. Чинаев и др. М.: Машиностроение, 1987, — 280 с.
- Системы: декомпозиция, оптимизация и управление/ М. Сингх, А. Титли, — М.: Машиностроение, 1986, — 496 с.
- Смирнов Е.Л., Яловенко A.B., Якушенков A.A. Технические средства судовождения: Теория.- М.: Транспорт, 1988, — 376 с.
- Смирнов Ю.А. Исследование эффективности рулевых устройств при аварийном.маневрировании судов: Автореф. дисс. к.т.н.- Л.: ЛКИ, 1975.
- Соболев Г. В. Управляемость корабля и автоматизация судовождения,— Л.: Судостроение, 1976, — 478 с.
- Сокольников И.С. Тензорный анализ,— М.: Наука, 1971, — 376 с.
- Сорокин А.И. Морская картография.-Л.: ГУНИО МО, 1985.-254 с.
- Справочник гидрографа по терминологии, — Л.: ГУНИО МО, 1984.256 с.
- Справочник по теории корабля: Т.1. Гидродинамика. Сопротивление движению судов. Судовые движители/Под ред. Я.И.Войт-кунского, — Л.: Судостроение, 1985, — 768 с.
- Справочник по теории корабля: Т.3. Управляемость водоизмещаю-щих судов. Гидромеханика судов с динамическими принципами поддержания/ Под ред. Я. И. Войткунского.- Л.: Судостроение, 1985, — 544 с.
- Справочник по теории автоматического ' управления /Под ред. А. А. Красовского.- М.: Наука, 1987, — 712 с.- 275
- Субаров H.B., Пучков A.M. Принцип адаптивного и функционально логического управления// Изв. АН СССР/ Техн. киберн., 1977, — N3, — С. 165 — 175.
- Суевалов Л.Ф. Справочник по расчетам судовых автоматических систем,— Л.: Судостроение, 1989.- 408 с.
- Танака М., Мията X. Усовершенствование имитации маневрирования судна/ Исикавадзима-Харима, 1977, — Т.77, — N2, — С.135−142.
- Тараненко В.Т., Момджи В. Г. Прямой вариационный метод в краевых задачах динамики полета, М.: Машиностроение, 1986.- 128 с.
- Таратынов В.П. Судовождение в стесненных водах.- М.: Транспорт, 1980, — 172 с.
- Таратынов В.П. Расчет момента «критического положения» судов и понятие «района непосредственной близости» //Судовождение/ Сб. науч. тр. ЛВИМУ, 1975. Вып. 16, — С. 68 — 75.
- Тимофеев A.B. Адаптивные робототехнические комплексы,— Л.: Машиностроение, 1988, — 332 с.
- Тимофеев A.B. Свойства обратимых моделей динамики и синтез высококачественного робастного управления// Изв. АН СССР. Техн. киберн., 1991, — № 1.- С. 45 56.
- Тихонов В.И. Определение параметров управления судном при переходе с поворота' заданного радиуса на прямой курс// Вопросы повышен, безопас. судоход, на внутр. вод. путях/ Тр. ГИИВТ, 1987, — Вып. 223, — С. 48 55.
- Тихонов В.И. Исследование управления судном при переходе с прямого курса на поворот заданного радиуса// Вопросы повышен, безопас. судоход, на внутр. вод. путях/ Тр. ГИИВТ, 1987.-Вып. 223, — С. 27 47.
- Тихонов В.И. К решению задачи об управлении судном при переходе с прямолинейного курса на циркуляцию// Вопросы соверш.- 276 методов и средств судовожд. на внутр. вод. путях/ Тр. ГИИВТ, 1983.- Вып.197.- С. 11 29.
- Токарев П.Н. Обеспечение безопасности маневрирования крупнотоннажных грузовых судов на малых скоростях движения: Авто-реф. дисс. к. т.н. Горький: ГИИВТ, 1989.- 21 с.
- Трунов А.Н. Математическая модель подводного аппарата с учетом динамических .свойств управляющих систем// Проектир. подв. ап. Николаев: НКИ, 1990, — С. 35 — 45.
- Тумашик А.П. Расчет гидродинамических характеристик судна при маневрировании/ Судостроение, 1978.- N 5, — С. 13 15.
- Уколов И.С., Бек В.В., Махлин А. Р. Интегрированные системы активного управления. Методы алгоритмической интеграции, — М.: Наука, 1986, — 180 с.
- Улитко А.Ф. Пространственное движение упругих тел// Изв. АН СССР/ МТТ, — 1990, — № 6. С. 55 — 66.
- Управление крупнотоннажными судами/ В. И. Удалов, и др.- М.: Транспорт, 1986, — 229 с.
- Управление морскими подвижными объектами/ Д. М. Лернер, Ю. А. Лу-комский, В. А. Михайлов и др. Л.: Судостроение, 1970.-271 с.
- Управление судами и составами/ Н. Ф. Соларев, В. И. Белоглазов, В. А. Тронин и др. М.: Транспорт, 1983, — 296 с.
- Управление судном/ С. И. Демин и др.- М.:Транспорт, 1991.-358 с.
- Управление судном и его техническая эксплуатация /Под ред. А. И. Щетининой. М.: Транспорт, 1983.- 655 с.
- Устойчивость адаптивных систем/ Б. Андерсон, Р. Битмид, К. Джонсон и др. М.: Мир, 1989, — 263 с.
- Федосов Е.А., Инсаров В. В., Селивохин О. С. Системы управления конечным положением в условиях противодействия среды.- М.: Наука, 1989, — 272 с.- 277
- Фрадков A. Jl. Адаптивное управление в сложных системах: Беспоисковые методы. М.: Наука, 1990, — 296 с.
- Харьков В.П. Адаптивное управление динамическими системами на основе обратных задач динамики// Изв. РАН. Техн. киберн., 1994.- № 4.- С.115 124.
- Хан X. Теория упругости: Основы линейной теории и ее применения, — М.: Мир, 1988, — 344 с.
- Ходкость и управляемость судов/ В. Ф. Бавин, В. Г. Павленко, В. И. Зайков, Л.Б.Сандлер/ Под ред. В. Г. Павленко. М.: Транспорт, 1991, — 397 с.
- Хоренко В.И. Автоматизация расчетов ходкости на основе математических моделей. Л.: Судостроение, 1977.
- Хильгерт X. Определение понятия ближней зоны в судовождении /Перевод ВЦП № Е-31 372, — М.: 1983, — 32 с.
- Черноусько Ф.Л. Оценивание фазового состояния динамических систем. Метод эллипсоидов. М.: Наука, 1988.- 320 с.
- Черноусько Ф.Л. Декомпозиция и субоптимальное управление в динамических системах// ПММ, 1990, — Т.54.- № 6, — С.883 893.
- Чикова Н.В. Уравнения движения в квазикоординатах твердых тел в жидкости// Вестник ЛГУ/ Сер.1.- 1989.- № 2, — С. 68 -72.
- Элькинд Л.Б., Малахов В. М., Федоров A.M. Электронная навига-ционно-управляющая система «Навигатор» 'для гражданских судов// Судостр. пром-ть: Сер. Навигация и гироскопия, 1991,2. С. 18 — 22.
- Элькинд Л.Б., Малахов В. М., Шустер-Шерман В.И. Формирование физически реализуемой линии пути управляемого судна в системе «Навигатор"// Судостр. пром-ть: Сер. Навигация и гироскопия, 1991, — № 2, — С. 32 39.
- Юдович А.Б. Предотвращение навигационных аварий морских судов,— М.: Транспорт, 1982.
- Яскевич А.П., Зурабов Ю. Г. Комментарии к МППСС-72: Справочник, — М.: Транспорт, 1990, — 479 с.
- Abkowitz М.A. Measurement of hydrodynamic characteristics from ship manoeuvring trials by system identification// Soc. of nav. Arch, and Mar. Eng. Trans., 1980. V. 88.
- Asai S., Kobayashi E. A simultion model for the prediction of ship manoeuvrability/Mitsubishi Heavy Int. Techn. Rev., 1987, — V. 24. № 2, — p. 133 — 139.
- Astrom K.J. Same aspects on the control of large tankers// Best notes contr. J. See., 1977, — № 2, — p. 379 399.
- Bria M.G., Savtirana G.F. Математическая модель для моделирования характеристик маневренности кораблей/ Marina Italiana, 1974, — V. 72. № 4.- p. 67 — 71.
- Brix J. Bahnanalysen «Hohere Nautik"/ Shiff & Hafen, 1983.-V. 35. — № 2. — s. 38 — 44.
- Buller A., Yurdsinski M., Pastusiak T. Trojwymiarowa domena statku/ Inz. Ruchu Mar. Mater, symp. «Omarea, 1986».-Szczecln, 1986, — p. 5 15.
- Burns R.S. A new approach to optimising fuel economy for ships In a seaway// MCMC'90/ Proc. of Int. Conf.- London-New York, 1990, apr. p. 372 — 382.
- Chllo B., Poerlo V. Sviluppo dl up «ship handling simulator» ed esame delle sue applicasionl pratiche nella progettaslone dl navl e dl attresasatlure portuali/ Marina Itallana, 1984.-V.82.- № 5−6.- p.20 29.
- Chudley J., Dove M.J., Tapp N. J. A review of mathematical models used In ship manoeuvres// Proc. of the 3rd Int. Conf. on Comp. Aided Desing, Manual and Oper. in the Marine and O. ffshore Int. Boston: CMP, 1991.
- Clarke D. The application of manoeuvring criteria in hull design using linear theory// The Royal Inst, of Nav. Arch. Trans, 1982, apr.
- Colley B.A., Curtis R.G., Stockel C.T. Manoeuvring times, domains and arenas/ J. of Navigation, 1983, — V.36.- № 3.-p. 324.
- Coldwell T.G. Marine traffic behaviour in restricted waters/ J. of Navigation, 1983, — V. 36, — № 4.- p. 430.
- Davis P. V., Dave M.J., Stockel C.T. A computer simulation of marine traffic using domains and arenas/ J. of Navigation, 1980, — V.33.- № 2. p. 215.
- Drewelow W., Halwas M. Experimentelle ermittlung linearer modelle zur beschreibung dur gesteuerten schiffsbewegung/ Mess-steuern-regeln, 1987, — V.30.- № 8, — p. 353 358.- 280
- Farbrother H.N., Stacey B.A. Fuzzy logic control of a remotely operated submersible// Model, and contr. of mar. craft/ Proc. of Int. Conf.- London, New York, 1990, apr. p. 193 -210.
- Flower J.O. Approximate analytical solutions to non-linear steering equations/ Int. Shipbuild. Progr., 1974.- V.21.-№ 241.- p. 276 280.
- Francis R.A., Wallis B.D. Development of a mathematical model for vessel motion prediction// Proc. of Int. Mar. Conf. The impact of new techn. on the marine ing. (sept. 13 -15, 1993).- Southampton: SIHE, 1993.-V.2.-pap.50.- p.1−13.
- Fuji i Y., Tanaka K. Traffic capacity/ J. of Navigation, 1971.- V.24.- № 4.- p.542 552.
- Fujii Y., Yamanouchi A., Matui T. Survey on vessel traffic management systems.- Jap.: Min. of Transport, 1984, — 131 p.
- Fujino M. The effect of frequency dependence of the stability derivativis on maneuvering motion/ Int.Shipbuild. Progr., 1975, — V. 22. № 256. — p. 416 — 432.
- Fujino M. A consideration on the coordinete system used to describe sway and yaw motions of a ship/ J. Soc. Nav. Archit. Jap., 1977, — № 141.- p.97 106.
- Gill A.D. The identification of manoeuvring equations from ship trials results/ Trans. Roy. Inst. Archit., 1976, — № 118.- p.145−157.
- Goodwin E.M. A statistical study of ship domains/ J. of Navigation, 1975, — V.28.- № 3, — p. 328.
- Goodwin E.M. Determination of ship domain size/ Pr.Conf.Math. Aspects of Mar. Traffic. London, Acad.'press, 1977, — p. 103.
- Hayashi S., Kuwajima S. A stranding avoidance system using- 281 radar Image matching. Development and experiment/ J. of Navigation, 1991, — V.44. № 2, — p. 205 — 212.
- Healey A. J., Papoulias F.A., Lienard D. Multivariate sliding mode control for autonomous diving and steering of unmanned under water vehicles// Model, and contr. of mar. craft /Proc. of Int. Conf.- London, New York, 1990, apr. p. 293−314.
- Holmes J.D. A statistical study of factors affecting navigation decision making/ J. of Navigation, 1980.-V.33.- № 2.-p.206.
- Hwang Wei-Yuan. Cancellation effect and parameter identifi-ability of ship steering dynamics/ Int. Shipbuild. Progr., 1982, — V. 29. N332, — p. 90 — 102.
- Imazu H., Koyama T. The determination of collision avoidance action/ J. of Jap. Ins. of Nav. T 1984, — V.70.
- James M.K. Modelling the decision in computer simulation of ship navigation /J. of Navigation, 1986, — V.39.- № 1, — p.32.
- James M.K., Smithson M.J. Modelling mariners' decisions and manoeuvres/ Proc. 5 Int. Radar and Nav. Sim. Lec. Conf., 1986.
- Kanshine A., Hollocou Y. Mathematicalmodel representing the behaviour of large vessels/ 10 Conf. Int. Assoc. Lighthouse Auth.- Tokyo, 1980, — Pap. Paris, s.a.- 20 pp.
- Kearon J. Computer programs for collision avoidance and traffic keeping/ Proc. Conf. Math. Aspect of Mar. Traffic.-London, 1977.
- Kijima K., Nahiri Y., Tsutseci Y., Matsunaga M. Prediction method of ship manoeuvrability in deep and shallow water/ Proc. MARSIM & CSM.- Tokyo, 1990, June.- p.311 318.
- King T. A.• Vision 2100 navigation safety, control system: Open architecture, variable configuration, automated or advo-sory, with voyage plan and radar scan superimposed on ECDIS/- 282
- Sea Technol.- 1995, — 36, — № 3, — C. 51 53.
- Kobayashi H., Sakaguchi Y., Okada K. Design technique for fairway system: 1. Formulation of evaluation of marine traffic/ J. Jap. Inst. Navig. 1995.- 91.- C.271 — 279.
- Kobayashi H., Sakaguchi Y., Okada K. Design technique for fairway system: II. Application for assessment of marine traffic// J. Jap. Inst. Navig. 1995, — 93.- C.213 — 221.
- Kose K. On a new mathematical model of manoeuvring motion of a ship/ J.Soc.Nav. Archit. Jap., 1979.- № 146.- p. 229 236.
- Kose K. On a new mathematical model of a ship and its applications/ Int. Shlpbuild.Progr., 1982.- V.29.-№ 336.-p.205−220.
- Krimpton C. Spayman W. Safety .and efficiency implications of a new Rotterdam-Evroport vessel traffic management system /Proc. of Int. Symp.- Delfi: Univ. press, 1976, — p. 75 109.
- Kristiansen S., Rensevik E., Mathisen L. Integrated total control of the bridge// Trans/ Soc. Nav. Archit. and Mar. Eng., 1989, — 97, — P. 279 296.
- Kugumiya H. On the effect of bottom slope change to ship’s movement/ J. Jap. Inst. Navig, 1989: — № 81.- P. 107 115.
- Kuljaca L., Vukic Z. Identifkacija broda kao objeekta upravljanja po kursu i trajektoriji/ Brodogradnja, 1981.-V.29.- № 2. p.135 — 143.
- Lamb W.G.P. The estimation of the mean size of ship domains /J. of Navigation, 1984, — V.36.- № 1.
- Loeser D. Determination of maneuvering properties in shallow water by impulse response techniques/ J. Ship. Res., 1982. V. 26. — № 1, — p. 1 — 15.
- Mandel P. Ship manouvering and control/ Principles of naval architecture.- New York: SNAME, 1967, — p.463 606.- 283
- MierauJ.-W. Adaptionsverjahren fur kurslegler/ Jahrb.1983. Schiffbautechn. Ges.77 bd., Berlin, e.a., 1984.- p.379−396.
- Nagasawa A. Marine traffic simulation including collision avoidance/ J. of Jap. Ins. of Nav., 1984, — № 80.
- Newman J.N. Theoretical methods in ship maneuvering/ Adv. Marine Technol., 1979, — V.l.- p.335 359.
- Norrbin N.H. Theory and observations on the use of a mathematical model for ship manoeuvring in deep and confined waters/ Proc. 8th Symp. Naval Hydrodynamics.- Pasadena, California, 1970.
- Pourzanjani M.M.A. Formulation of the force mathematical model of ship manoeuvering/ Int. Shipbuilding Progr.- 1989. -V. 37. № 409, sept. — p. 5 — 32. ~
- Pourzanjani M.M.A. On the coupled heave and pitch motion of marene craft// Model, and contr. of mar. craft/Proc. of Int. Conf.- London, New York, 1990, apr.- p. 293 314.
- Rios-Neto A., Da Guz J.J. A stochastic rudder control law for ship path follwing autopilots/ Automatica, 1985, — V.21.-№ 4.- p. 371 — 384.
- Sharma S.D. Manoeuvring technical manual/ Schiff and Hafen, 1992, — V. 44. № 7, — p. 53 — 55.
- Soding H. Body forces/ Schiff and Hafen, 1990, — V.42.- H7.~ p. 68 73.
- Titus H.A., Cairns W.R., Cooper C.R. Desing of dynamic- 284 positioning systems for buoy repenishment at sea// MCMC/Proc. of Int. Conf. London, New York, 1990, apr. — p. 274 — 292.
- Toyoda S., Fujii Y. Marine traffic engineering /J. of Navigation, 1971, — V.24.- M.--p.24.
- Wallis B., Francis R., Kasasbeh Y. A mathematical approach to modelling of the motion of smoll vessel for use in autopilots// Proc. of Int. Mar. Conf. The impact of new techn. on the marine ing.- Southampton: SIHE, 1993.- V.2.- pap.56.
- Wentzell H. New advances in integrated bridge technology/ Sea Technol. -1995. 36, — № 6, — P. 63 — 65.
- Wilson P.A., Squire M.A., Seakins A.P. Enhanctd preliminary design ship manoeuvring simulator teckniques //MCMC/ Proc. of Int. Conf. London, New York, 1990, apr. — p.40 — 51.
- Wolff K. Korrelation modele Grobausfuhrung bei manovrier-versuchenim eis/Schiff and Hafen, 1986, — V.38.- H7.-s.43−48.
- Zhag J., Hearn G., Sen P. The identification of ship manoeuvres via neural networks// Proc. Int. Mar. Conf. The impact of new tech. on the marine ing.-Southampton: SIHE, 1993.-V2.-p.52.
- Zhao Jingsong, Wu Zhao1in, Wang Fengchen. Comments on ship domains.- J. of Navigation, 1993, — V.46.- № 3, — p.422 436.
- Zhao Jingsong, Wang Fengchen, Wu Zhao1 in. The development of ship collision avoidance automation/ J. of Navigation, 1991.-V.45.- № 1.- p.107 113.
- Zhao Jingsong, Wang Fengchen. Collision avoidance decision making in ship manoeuvres/ Proc. 12th Int. Fed. of Oper. Res. Soc. Conf., 1990, 25−29 June.