Классификация задач нелинейного программирования и методы их решения
Множество точек х, удовлетворяющих ограничениям задачи (1.1.1), называется допустимым множеством задачи. Ограничения могут отсутствовать. В этом случае идет речь о задаче безусловной оптимизации. Точкой из допустимого множества называется точка локального максимума, если существует некоторое число, такое, что для любой допустимой точки, такой, что, выполняется. Рисунок 1.1 Разница между… Читать ещё >
Классификация задач нелинейного программирования и методы их решения (реферат, курсовая, диплом, контрольная)
Постановка задач нелинейного программирования
В отличии от задач линейного программирования, которые состоят в минимизации или максимизации линейной функции при линейных ограничениях, во многих оптимизационных задачах целевая функция, или функции, задающие ограничения, не являются линейными. Такие задачи называются задачами нелинейного программирования.
К нелинейному программированию относят квадратичное, дробное, выпуклое, дискретное, целочисленное и геометрическое программирование.
Решение задачи нелинейного программирования (поиск глобального минимума или максимума) состоит в отыскании таких значений переменных, подчиненных системе ограничений, при которых достигает минимума или максимума данная целевая функция. [3].
В общем виде задача нелинейного программирования может быть записана в виде.

.




Функция называется целевой функцией, а неравенства называются ограничениями задачи.
Множество точек х, удовлетворяющих ограничениям задачи (1.1.1), называется допустимым множеством задачи. Ограничения могут отсутствовать. В этом случае идет речь о задаче безусловной оптимизации.

Оптимальным решением задачи (1.1.1) (точкой глобального максимума) называется любая точка из допустимого множества такая, что справедливо соотношение.

где х — произвольная точка из допустимого множества задачи.
В теории нелинейной оптимизации выделяют понятие локального максимума (локального минимума).



Точкой из допустимого множества называется точка локального максимума, если существует некоторое число, такое, что для любой допустимой точки, такой, что, выполняется .
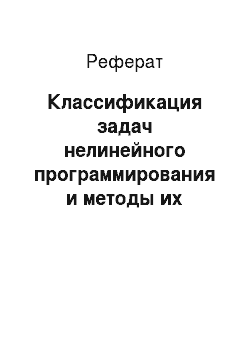
Разницу между глобальным и локальным максимумами легко видеть на следующем рисунке.

Рисунок 1.1 Разница между глобальным и локальным максимумами Точки, А и В являются точками локального максимума, точка С является точкой глобального максимума.